
Apéndice
- Page ID
- 49605
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vector}[1]{\vec{\mathbf{#1}}}\)
\( \newcommand{\Disco}{\Bbb D}\)
\( \newcommand{\C}{\Bbb C}\)
\( \newcommand{\Q}{\Bbb Q}\)
\( \newcommand{\R}{\Bbb R}\)
\( \newcommand{\K}{\Bbb K}\)
\( \newcommand{\N}{\Bbb N}\)
\( \newcommand{\Z}{\Bbb Z}\)
\( \newcommand{\bo}{\textbf O}\)
\( \newcommand{\eps}{\varepsilon}\)
\( \newcommand{\la}{\lambda}\)
\( \newcommand{\om}{\omega}\)
\( \newcommand{\bmatriz}{\bmatrix \format \r&&\quad\r\\}\)
\( \newcommand{\bmatrize}{\bmatrix \format \c&&\quad\c\\}\)
\( \newcommand{\sep}{\, \equiv \,}\)
\( \newcommand{\xsep}{\quad \equiv \quad}\)
\( \newcommand{\xlsep}{\qquad \equiv \qquad}\)
\( \newcommand{\matriz}{\bmatrix\format\r&&\quad\r\\}\)
\( \newcommand{\endmatriz}{\endbmatrix}\)
\( \newcommand{\conj}[1]{\overline{}[1]}}\)
\( \newcommand{\vector}[1]{\vec{\textbf {}[1]}}}\)
\( \newcommand{\abs}[1]{\left\vert {#1} \right\vert}}\)
\( \newcommand{\norm}[1]{\left\Vert {#1}\right\Vert}\)
\( \newcommand{\bil}[2]{\left\langle {#1},{#2} \right\rangle}\)
\( \newcommand{\absbil}[2]{\abs{ \bil{#1}{#2} }}\)
\( \newcommand{\vectori}{\vector{\mathbf{\i}}}\)
\( \newcommand{\vectorj}{\vector{\mathbf{\j}}}\)
\( \newcommand{\vectork}{\vector{\mathbf{k}})\)
\( \newcommand{\vectorr}{\vector r}\)
\( \newcommand{\vectorrp}{\vector r}\,{}'}\)
\( \newcommand{\vectorrs}{\vector r}\,{}''}\)
\( \newcommand{\parteim}{\mathop{\text{Im}}\nolimits}\)
\( \newcommand{\partere}{\mathop{\text{Re}}\nolimits}\)
\( \newcommand{\sen}{\mathop{\text{sen}}\nolimits}\)
\( \newcommand{\sinc}{\mathop{\text{sinc}}\nolimits}\)
\( \newcommand{\sa}{\mathop{\text{sa}}\nolimits}\)
\( \newcommand{\senh}{\mathop{\text{senh}}\nolimits}\)
\( \newcommand{\arsenh}{\mathop{\text{arsenh}}\nolimits}\)
\( \newcommand{\arcosh}{\mathop{\text{arcosh}}\nolimits}\)
\( \newcommand{\Log}{\mathop{\text{Log}}\nolimits}\)
\( \newcommand{\Ln}{\mathop{\text{Ln}}\nolimits}\)
\( \newcommand{\Arg}{\mathop{\text{Arg}}\nolimits}\)
\( \newcommand{\arcsen}{\mathop{\text{arcsen}}\nolimits}\)
\( \newcommand{\arcos}{\mathop{\text{arccos}}\nolimits}\)
\( \newcommand{\arctg}{\mathop{\text{arctg}}\nolimits}\)
\( \newcommand{\ran}{\mathop{\text{ran}}\nolimits}\)
\( \newcommand{\maxe}{\mathop{\text{máx}}}\)
\( \newcommand{\mine}{\mathop{\text{mín}}}\)
\( \newcommand{\lime}{\mathop{\text{lím}}}\)
\( \newcommand{\lin}{\mathop{\text{lin}}\nolimits}\)
\( \newcommand{\inte}{\mathop{\text{int}}\nolimits}\)
\( \newcommand{\grad}{\mathop{\text{grad}}\nolimits}\)
\( \newcommand{\signo}{\mathop{\text{sig}}\nolimits}\)
\( \newcommand{\fl}{\mathop{\text{flot}}\nolimits}\)
\( \newcommand{\essup}{\mathop{\text{ess}\,\text{sup}}\nolimits}\)
\( \newcommand{\card}{\mathop{\text{card}}\nolimits}\)
\( \newcommand{\rot}{\mathop{\text{rot}}\nolimits}\)
\( \newcommand{\diver}{\mathop{\text{div}}\nolimits}\)
\( \newcommand{\volum}{\mathop{\text{vol}}\nolimits}\)
\( \newcommand{\Res}{\mathop{\text{Res}}\nolimits}\)
\( \newcommand{\grado}{\mathop{\text{gr}}\nolimits}\)
\( \newcommand{\dpar}[2]{\dfrac{\partial{#1}}{\partial{#2}}}\)
\( \newcommand{\dparx}[1]{\dfrac{\partial {#1}}{\partial x}}}\)
\( \newcommand{\dpary}[1]{\dfrac{\partial {#1}}{\partial y}}}\)
\( \newcommand{\dparz}[1]{\dfrac{\partial {#1}}{\partial z}}}\)
\( \newcommand{\dparr}[1]{\dfrac{\partial {#1}}{\partial r}}}\)
\( \newcommand{\dparth}[1]{\dfrac{\partial {#1}}{\partial \theta}}}\)
\( \newcommand{\dparxx}[1]{\dfrac{\partial^2 {#1}}{\partial x^2}}}\)
\( \newcommand{\dparyy}[1]{\dfrac{\partial^2 {#1}}{\partial y^2}}}\)
\( \newcommand{\dparxy}[1]{\dfrac{\partial^2 {#1}}{\partial x \partial y}}}\)
\( \newcommand{\dparzz}[1]{\dfrac{\partial^2 {#1}}{\partial z^2}}}\)
\( \newcommand{\dparxz}[1]{\dfrac{\partial^2 {#1}}{\partial x \partial z}}}\)
\( \newcommand{\dparyz}[1]{\dfrac{\partial^2 {#1}}{\partial y \partial z}}}\)
\( \newcommand{\dpardos}[2]{\dfrac{\partial^2 {#1}}{\partial {#2}^2}}}\)
\( \newcommand{\dparcruz}[3]{\dfrac{\partial^2 {#1}}{\partial {#2} \partial {#3}}}\)
\( \newcommand{\dtan}[1]{ \dfrac{\partial {#1}}{\partial {\vector t}} }}\)
\( \newcommand{\dnormal}[1]{ \dfrac{\partial {#1}}{\partial {\vector n}} }}\)
Coordenadas polares
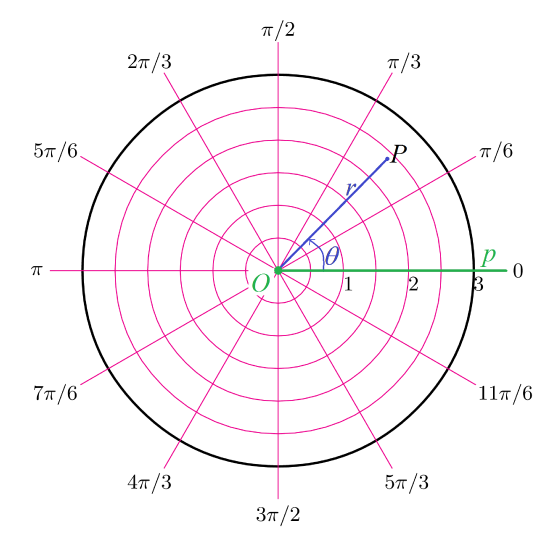
Además del sistema cartesiano, hay otros sistemas de coordenadas que pueden ser más apropiados para representar algunas curvas y magnitudes físicas. El ejemplo más importante en el plano es el de las coordenadas polares. Fijados un punto \( O \) llamado polo y una semirrecta \( p \) con extremo en \( O \) llamada eje polar, las coordenadas polares de un punto \( P \) del plano son \( (r,\theta) \) donde \( r \), el radio o distancia polar, es la distancia de \( P \) al polo \( O \) y \( \theta \), el ángulo polar, es el ángulo (medido en radianes y en sentido positivo) que forma el segmento \( OP \) con el eje polar.
Coordenadas polares.
Relación entre coordenadas cartesianas y coordenadas polares. En el plano superponemos el sistema de coordenadas cartesianas y el sistema de coordenadas polares de manera que el polo coincide con el origen y el eje polar es el semieje positivo de abscisas. Entonces, las coordenadas polares \( (r,\theta) \) se relacionan con las coordenadas cartesianas \( (x,y) \) como sigue:
- Para pasar de polares a cartesianas: \( x = r \cos(\theta) \) e \( y = r \sen(\theta) \).
- Para pasar de cartesianas a polares: \( r = \sqrt{x^2+y^2} \) y \( \theta =\arctan(y/x) \) para \( x\neq 0 \). Si \( x=0 \) entonces \( \theta =\pi/2 \) si \( y>0 \) o \( \theta =3\pi/2 \) si \( y<0 \), mientras que el origen no tiene ángulo polar (en realidad, no hace falta; es el único punto en el que \( r=0 \)).
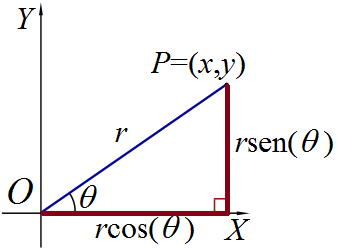
Coordenadas polares y cartesianas.
Las coordenadas polares determinan las coordenadas cartesianas de manera única. Las coordenadas cartesianas determinan la distancia polar de forma única, pero determinan el ángulo polar \( \theta \) salvo múltiplos enteros de \( 2\pi \). Habitualmente, la variación de \( \theta \) se considera en el intervalo \( [0,2\pi) \) o en el intervalo \( (-\pi,\pi] \). En particular, si se usa una calculadora para hallar \( \arctan(y/x) \), hay que tener en cuenta los signos de \( x \) e \( y \) para decidir, según el cuadrante en el que esté el punto \( (x,y) \), si el valor de \( \theta\) es el dado por la calculadora o bien hay que sumar \( \pi \) a dicho resultado.
Curvas en coordenadas polares. Una ecuación de la forma \( r=r(\theta) \) permite definir una curva en el plano: la formada por aquellos puntos \( (x,y) \) cuyas coordenadas polares verifican \( r=r(\theta) \), que se llama ecuación de la curva en coordenadas polares. Para estos puntos, las coordenadas cartesianas \( x \) e \( y \) son función del ángulo \( x(\theta)=r(\theta)\cos(\theta) \) e \( y (\theta)=r(\theta)\sen(\theta) \).
Algunas curvas se describen mejor en polares que en cartesianas. Para dibujarlas a mano alzada, es útil contar con una plantilla como la de la figura, llamada papel polar, en la que aparece una malla de líneas que corresponden a valores constantes del ángulo y a valores constantes del radio (es lo análogo a cuando usamos coordenadas cartesianas en un papel cuadriculado donde las líneas verticales corresponden a \( x=\text{constante} \) y las horizontales a \( y=\text{constante} \)).
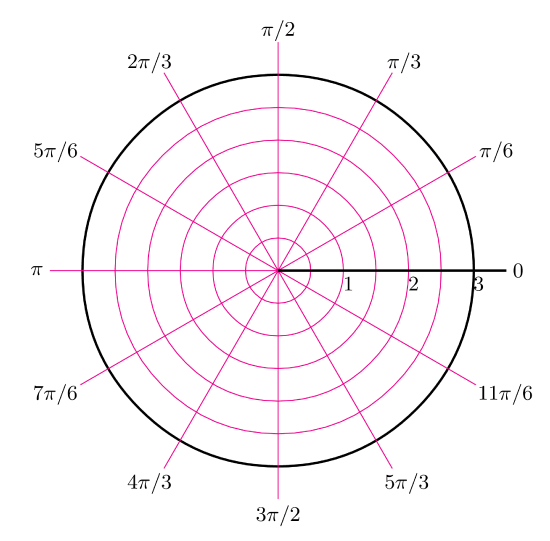
Papel polar (\( \theta=0, \pi/6, \dots, 11\pi/6 \); \( r=0.5,1, \dots, 3 \).
Ejemplos. Veamos algunos ejemplos de curvas definidas en coordenadas polares.
(1) El caso más simple es la circunferencia con centro el origen y radio \( a>0 \) cuya ecuación en coordenadas polares es \( r(\theta)= a\) para \( 0 \leq \theta \leq 2\pi \).
(2) La ecuación \( r=a \theta \), con \( a>0 \) es una espiral, llamada espiral de Arquímedes.
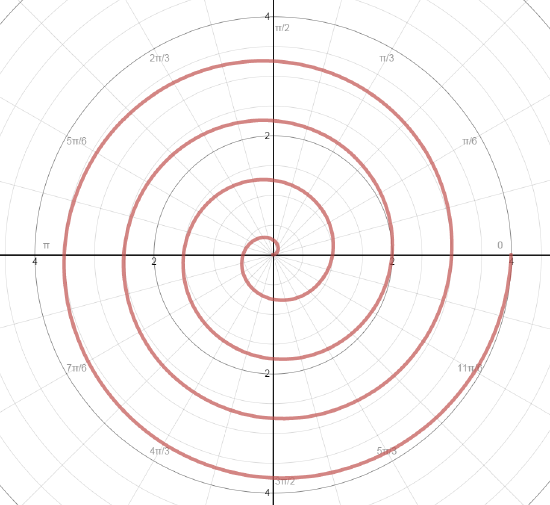
Espiral de Arquímedes \( r=\theta/2\pi \).
(3) La circunferencia de radio \( a>0 \) cuyo centro es el punto \( (a,0) \). Esta circunferencia es tangente al eje \( OY \) en el origen y su ecuación en polares es \( r=2a \cos(\theta) \). Análogamente, la ecuación en polares de la circunferencia de radio \( a>0 \) cuyo centro es el punto \( (0,a) \) es \( r=2a\sen(\theta) \).
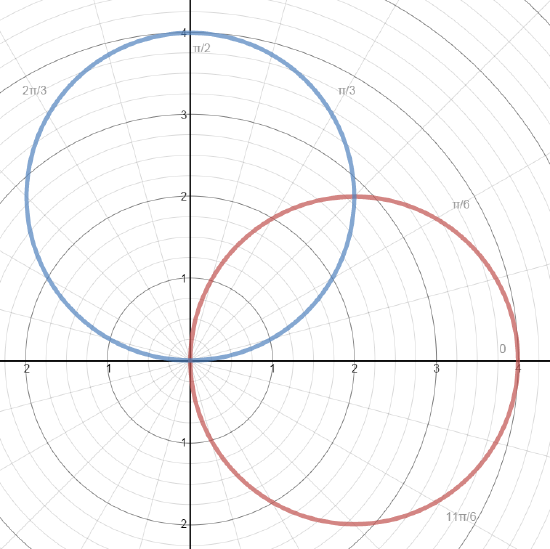
Circunferencias con radio \( 2 \) y centros \( (2,0) \) (roja) y \( (0,2) \) (azul).
(4) La curva de ecuación \( r=1-\cos(\theta) \) se llama cardioide porque parece un corazón.
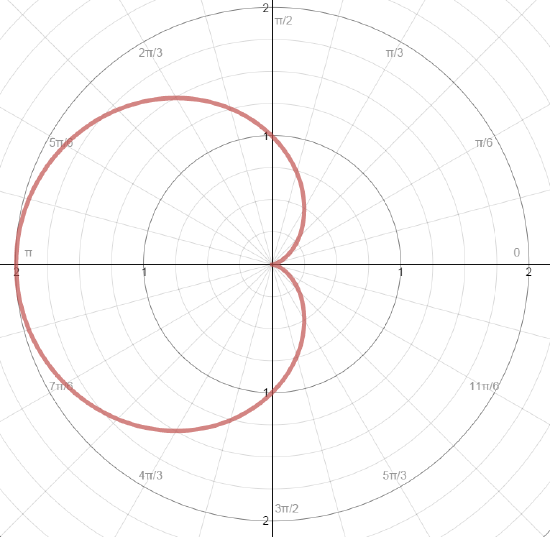
Cardioide \( r=1-\cos(\theta) \).
Curvas en coordenadas paramétricas
Funciones vectoriales. Una función vectorial de una variable real es una función \( \vecs r \) definida para \( t \) en un intervalo \( I \) cuyos valores son vectores \( \vecs r(t) \) en \( \R^2 \) o en \( \R^3 \). Las definiciones y los resultados que veamos a continuación se enunciarán para funciones vectoriales en 3D \( {\vecs r}(t) \in \R^3 \) y valen para funciones 2D sin más que suprimir la tercera coordenada (o considerar que vale \( 0 \) y nos movemos en el plano \( XY \) del suelo).
Si escribimos \( {\vecs r}(t) \) usando sus coordenadas en la base canónica de \( \R^3 \)
\[ {\vecs r}(t)=\bigl( x(t), y(t), z(t) \bigr)=x(t) \vecs i + y(t) \vecs j + z(t) \vecs k = x(t) {\vecs e_1} + y(t) {\vecs e_2} + z(t) {\vecs e_3}, \notag\]
las funciones \( x,y,z \colon t \in I \to x(t), y(t), z(t) \R \) que nos dan las coordenadas se llaman funciones componentes de \( {\vecs r} \).
La función vectorial \( {\vecs r}(t) \) es continua o es derivable en \( I \) si lo son sus funciones componentes y, cuando \( {\vecs r}(t) \) es derivable en \( I \), la derivada de \( {\vecs r}(t)\) es la función vectorial \( {\vecs r}\,{}'(t) = \bigl(x'(t) , y'(t), z'(t) \bigr) \).
Curva en coordenadas paramétricas. Una curva en coordenadas paramétricas o curva parametrizada en \( \R^3 \) es la imagen \( C \) de una función vectorial continua \( {\vecs r} \) definida en un intervalo \( I \). La variable independiente \( t \) de la función vectorial \( {\vecs r} \) se llama parámetro de la curva y la propia función \( {\vecs r} \) recibe el nombre de parametrización de la curva. Si usamos las funciones componentes \( {\vecs r}(t)= x(t) \vecs i+ y(t) \vecs j +z(t) \vecs k \), entonces la curva es el conjunto de puntos \( C=\bigl\{ \bigl( x(t), y(t), z(t) \bigr) \in \R^3 : t \in I \bigr\} \)
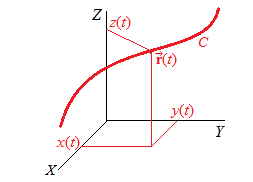
Curva en coordenadas paramétricas.
La aplicación CalcPlot3D permite dibujar curvas en 3D introduciendo la parametrización desde el teclado. En el dibujo vemos la hélice circular recta, que viene dada por la parametrización \( {\vecs r}(t)=\bigl(a \cos(t), a \sen(t), bt \bigr) \), con \( t \in [t_0,t_1] \) donde \( a \) es el radio del cilindro en el que se va enrollando la hélice y \( h=2 \pi b \) es la distancia vertical entre dos espiras consecutivas, llamada paso de la hélice.
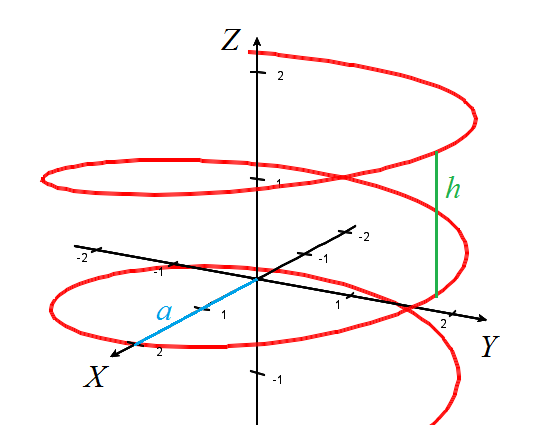
Hélice circular recta.
En el plano, la gráfica de una función \( f \) definida en un intervalo \( I \), es decir, la curva \( y= f(x) \) es una curva parametrizada en la que el parámetro es la variable \( x \) y la parametrización viene dada por\( \vecs r(x) = \bigl( x, f(x) \bigr) \) con \( x \in I \). Siguiendo en el plano, la curva dada en coordenadas polares por la ecuación \( r=r(\theta) \), con \( \theta \) en un intervalo \( I \), es una curva parametrizada en la que el parámetro es el ángulo polar \( \theta \) y la parametrización viene dada por\( \vecs r(\theta)= \bigl( r(\theta)\cos(\theta), r(\theta)\sen(\theta) \bigr) \) con \( \theta \in I \).
Punto inicial y punto final de una curva. Si \( I \) es un intervalo acotado \( I=[a,b] \) entonces los puntos \( {\vecs r}(a) \) y \( {\vecs r}(b) \) se llaman extremos de la curva; \( {\vecs r}(a) \) es el punto inicial y \( {\vecs r}(b) \) es punto final de la parametrización. Cuando \( {\vecs r} (a) = {\vecs r}(b) \) se dice que la curva es cerrada.
Cambio de parámetro. Una misma curva puede representarse mediante distintas parametrizaciones. Si tenemos dos parametrizaciones de una misma curva, digamos \( \vecs r_1(t) \) con \( t\in[a,b] \) y \( \vecs r_2(u) \) con \( u\in [c,d] \), entonces podemos establecer una relación que liga cada valor del parámetro \( t \) con el valor del parámetro \( u \) que corresponde al mismo punto de la curva: \( P={\vecs r}_1(t)={\vecs r}_2(u) \). Esta relación define la función que a cada \( t\in [a,b] \) le asigna el correspondiente \( u=u(t)\in [c,d] \) que se llama cambio de parámetro; naturalmente, la inversa de esta función es el cambio de parámetro que a cada \( u\in [c,d] \) le asigna el correspondiente \( t=t(u)\in [a,b] \).
Orientación. Diremos que dos parametrizaciones de una misma curva \( C \), \( \vecs r_1(t) \) con \( t\in[a,b] \) y \( \vecs r_2(u) \) con \( u\in [c,d] \), definen la misma orientación o que la recorren en el mismo sentido cuando se verifica que los extremos inicial y final de \( {\vecs r}_1 \) y \( {\vecs r}_2 \) coinciden: \( {\vecs r}_1(a)={\vecs r}_2(c) \) y \( {\vecs r}_1(b)={\vecs r}_2(d) \). Por el contrario, si los extremos inicial y final de \( {\vecs r}_1 \) y \( {\vecs r}_2 \) están intercambiados: \( {\vecs r}_1(a)={\vecs r}_2(d) \) y \( {\vecs r}_1(b)={\vecs r}_2(c) \), se dice entonces que \( {\vecs r}_1 \) y \( {\vecs r}_2 \) definen sobre la curva orientaciones opuestas.
Esta definición no basta para curvas cerradas ya que en una curva cerrada los extremos coinciden en un mismo punto \( L \). Cuando la curva es cerrada, fijamos dos puntos en la curva \( M,N \) distintos del extremo. Diremos que las dos parametrizaciones definen sobre \( C \) la misma orientación, o que la recorren en el mismo sentido, cuando, al partir de \( L \) como extremo inicial, ambas parametrizaciones pasan antes por \( M \) que por \( N \), o bien ambas pasan antes por \( N \) que por \( M \).
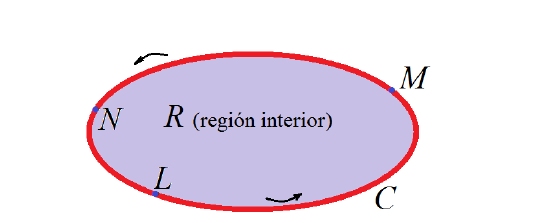
Orientación en una curva cerrada.
En el caso de curvas cerradas planas hay otras formas de estudiar la orientación. Si \( C \) es una curva cerrada plana en el plano \( XY \) que no tiene lazos, entonces se dice que \( C \) es una curva de Jordan. Diremos que una parametrización recorre una curva de Jordan en sentido positivo cuando la recorre en sentido antihorario, es decir, contrario al de las agujas de un reloj. Si llamamos \( R \) a la región interior de \( C \), entonces cuando recorremos la curva en sentido positivo, dejamos la región interior a la izquierda.
La función cambio de parámetro es creciente cuando ambas parametrizaciones definen la misma orientación y es decreciente cuando definen orientaciones distintas.
Recta tangente. Sea \( C \) una curva parametrizada por una función \( {\vecs r}(t) \) con \( t\in I \). Se dice que un punto \( P={\vecs r}(t_0) \) de \( C \) es regular cuando \( \vecs r \) es derivable en \( t_0 \), con derivada \( {\vecs r}\,{}'(t) \) continua en dicho punto y \( {\vecs r}\,{}'(t_0) \neq 0 \), y la recta tangente a la curva \( C \) en el punto \( P \) es la recta que pasa por \( P \) y tiene como vector director \( {\vecs r}\,{}'(t_0) \), que se llama vector tangente a la curva \( C \) en \( P \). Puede probarse que esta definición coincide con la definición habitual de la recta tangente como el límite, cuando \( Q \) se mueve sobre la curva tendiendo a \( P \), de las rectas que pasan por \( P \) y \( Q \).
Cuando todos los puntos de la curva son regulares, se dice que la parametrización es regular (en otros textos se emplean las palabras lisa o suave). Si el intervalo \( I \) puede descomponerse en una cantidad finita de subintervalos en cada uno de los cuales la parametrización es regular, entonces se dice que la parametrización es regular a trozos, es lo que ocurre, por ejemplo, cuando tenemos un polígono o una curva compuesta por tramos que se parametrizan de distinta forma, como un rectángulo.
En los puntos excepcionales \( P={\vecs r}(t_0) \) en los que \( \vecs r \) no es derivable o en los que \( {\vecs r}\,{}'(t_0)=\vecs 0 \), la noción de recta tangente puede perder su significado ya que en tales puntos la tangente puede no existir o no estar definida en forma única; ejemplos típicos son los picos o esquinas (como los vértices de un cuadrado o el origen para una cardioide).
Vector tangente unitario. Sea \( C \) la curva dada por una parametrización regular \( {\vecs r}(t) \) con \( t\in I \). Se define el vector tangente unitario a \( C \) en un punto \( P={\vecs r}(t) \) como \( {\vecs T}(t) ={{\vecs r}\,{}' (t)}\big/ {\norm{ {\vecs r}\,{}' (t) } }\).
Vector normal y recta normal. Si \( {\vecs r} \) es dos veces derivable entonces, derivando en \(\bigl\Vert{{\vecs T}(t)}\bigr\Vert^2=1 \), se deduce que \( 2 {\vecs T}(t) \cdot {\vecs T}'(t)=0 \), o sea, \( {\vecs T}'(t) \) es ortogonal al vector tangente \( {\vecs T}(t) \). El vector unitario en la dirección de \( {\vecs T}'(t) \) (si éste no es cero) se llama vector normal (a veces, vector normal principal) en el punto \( P={\vecs r}(t) \) y viene dado por \( {\vecs N}(t) ={{\vecs T}'(t)}\big/\bigl\Vert{{\vecs T'}(t)}\bigr\Vert \). En este caso, la recta que pasa por \( P \) y tiene como vector director \( \vecs N(t) \) se llama recta normal de la curva en \( P \).
Si \( {\vecs r}_1 \) y \( {\vecs r}_2 \) son dos parametrizaciones regulares de una misma curva que tienen la misma orientación, entonces ambas definen los mismos vectores unitarios tangentes y normales en cada punto; por el contrario, si tienen distinta orientación, entonces definen vectores tangentes unitarios opuestos.
El plano que pasa por \( P \) y tiene como vectores directores \( {\vecs T}(t) \) y \( {\vecs N}(t) \) se llama plano osculador a la curva en \( P \) y, en cierta forma, es el que mejor se aproxima a la curva; de hecho, si la curva está contenida en un plano de \( \R^3 \), entonces ése es su plano osculador. Cuando la curva representa la trayectoria de una partícula desplazándose en el espacio 3D, de manera que el parámetro \( t \) es el tiempo, el plano osculador coincide con el plano que en cada instante contiene el vector velocidad \( \vecs v (t)= \vecs r \,{}'(t) \) y el vector aceleración \( \vecs a(t) = \vecs r \,{}''(t) \). En particular, el plano osculador también puede construirse comoel plano que pasa por \( P \) y tiene como vectores directores \( {{\vecs r}\,{}'(t)} \) y \( {{\vecs r}\,{}''(t)} \) si éstos son linealmente independientes.
Triedro de Frenet. Si \( {\vecs r} \) es una parametrización regular dos veces derivable de una curva en \( \R^3 \) y \( {\vecs T}'(t) \ne \vecs 0 \) , entonces a los vectores unitarios \( {\vecs T}(t) \) y\( {\vecs N}(t) \) les podemos añadir un tercer vector unitario, su producto vectorial \( {\vecs B}(t)={\vecs T}(t) \times {\vecs N}(t) \), llamado vector binormal, de manera que \( \left\{ {\vecs T}(t), {\vecs N}(t), {\vecs B}(t) \right\} \) forman una base ortonormal de \( \R^3 \). Esta base se conoce como el triedro de Frenet de la curva en \( P=\vecs r(t) \) y se emplea en las aplicaciones mecánicas. El vector binormal \( {\vecs B}(t) \) es perpendicular al plano osculador y, por tanto, es constante cuando la curva es plana. El \( {\vecs B}(t) \) también puede construirse como un vector unitario paralelo a \( {{\vecs r}\,{}'(t)} \times {{\vecs r}\,{}''(t)} \), si estos vectores son linealmente independientes.
Longitud de una curva parametrizada. Sea \( C \) la curva dada en \( \R^3 \) por una parametrización regular a trozos \({\vecs r}(t) \) con \( t\in [a,b] \). Entonces, la longitud de \( C \) viene dada por la integral
\[ \text{longitud de \( C \)}=\int_a^b \norm{ {\vecs r}\,{}' (t) } \, dt= \int_a^b \sqrt{ \bigl[x' (t)\bigr]^2 + \bigl[y' (t)\bigr]^2 + \bigl[z' (t)\bigr]^2 } \, dt, \notag\]
donde \( \norm{\cdot} \) representa la norma euclídea o, en otros términos, el módulo del vector.
Esta definición se justifica aproximando la curva mediante poligonales inscritas en ella. Al considerar las longitudes de estas poligonales se obtiene una suma de Riemann que corresponde a la integral anterior. Puesto que una misma curva puede venir dada por parametrizaciones distintas, deberíamos asegurarnos de que la longitud, que se obtiene como el valor de una integral que depende de la parametrización, es la misma cualquiera que sea la parametrización elegida. Esto se puede hacer usando el teorema del cambio de variable para integrales.
Salvo en algunos casos muy simples, las integrales que dan lugar el cálculo de la longitud de una curva no admiten primitivas manejables, por lo que hay que acudir a métodos numéricos para calcularlas. El caso más notable es el de la longitud de una elipse \( \vecs r(t)= \bigl(a\cos(t), b\sen(t)\bigr) \) con \( t\in[0,2\pi] \), cuya longitud viene dada por la integral \( \int_0^{2\pi} \sqrt{a^2\sen^2(t)+b^2\cos^2(t)} \, dt= \int_0^{2\pi} \sqrt{b^2+(a^2-b^2)\sen^2(t)} \, dt \) cuyo integrando no admite una primitiva expresable como una función elemental si \( a \neq b \). Estas integrales se llaman integrales elípticas.