
9.7: Circuitos Computacionales
- Page ID
- 153838

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Cuando alguien menciona la palabra “computadora”, un dispositivo digital es lo que suele venir a la mente. Los circuitos digitales representan cantidades numéricas en formato binario: patrones de 1 y 0 representados por una multitud de circuitos de transistores que operan en estados saturados o de corte. Sin embargo, también se pueden usar circuitos analógicos para representar cantidades numéricas y realizar cálculos matemáticos, usando señales de voltaje variable en lugar de estados discretos de encendido/apagado.
Aquí hay un ejemplo simple de representación binaria (digital) versus representación analógica del número “veinticinco:”
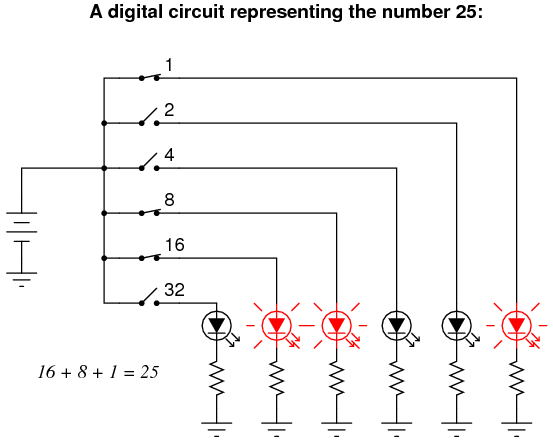
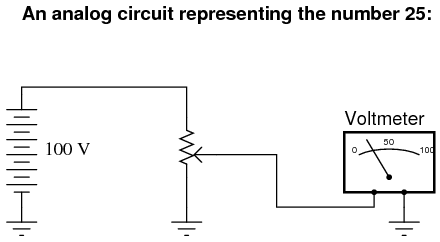
Los circuitos digitales son muy diferentes de los circuitos construidos sobre principios analógicos. Los circuitos computacionales digitales pueden ser increíblemente complejos, y los cálculos a menudo deben realizarse en “pasos” secuenciales para obtener una respuesta final, tanto como un ser humano realizaría cálculos aritméticos en pasos con lápiz y papel. Los circuitos computacionales analógicos, por otro lado, son bastante simples en comparación, y realizan sus cálculos de manera continua y en tiempo real. Sin embargo, hay una desventaja al usar circuitos analógicos para representar números: la imprecisión. El circuito digital que se muestra arriba representa el número veinticinco, precisamente. El circuito analógico que se muestra arriba puede o no estar exactamente calibrado a 25.000 voltios, pero está sujeto a “deriva” y error.
En aplicaciones donde la precisión no es crítica, los circuitos computacionales analógicos son muy prácticos y elegantes. Aquí se muestran algunos circuitos de amplificador operacional para realizar cálculos analógicos:
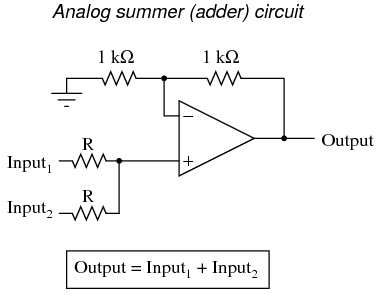
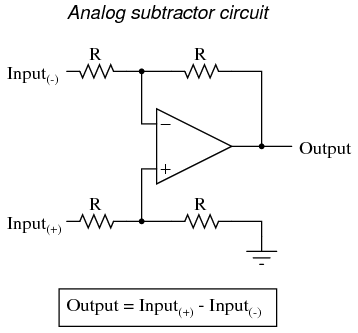
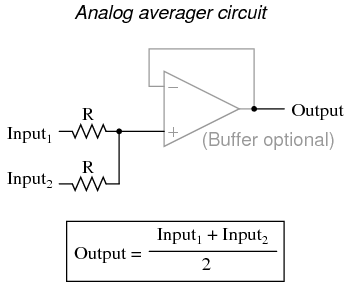
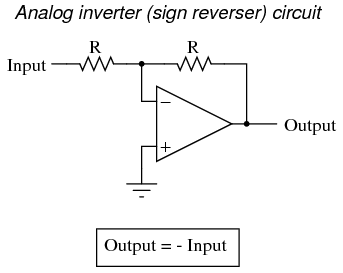
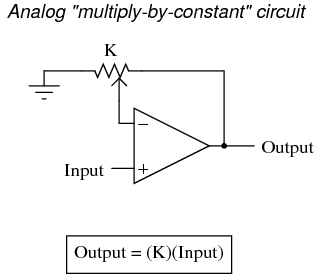
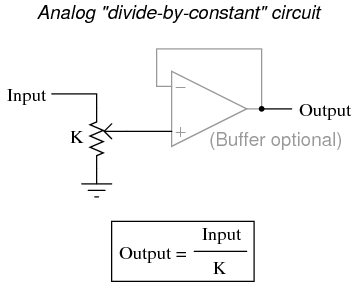
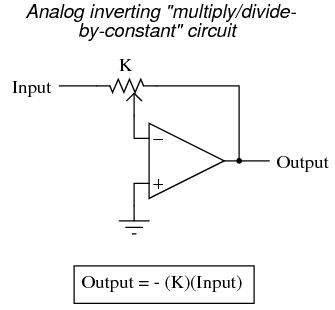
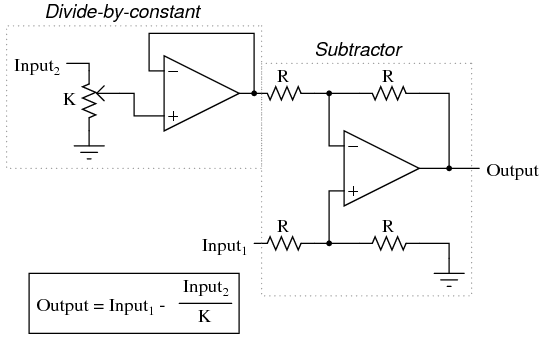
Cada uno de estos circuitos se puede utilizar de manera modular para crear un circuito capaz de múltiples cálculos. Por ejemplo, supongamos que necesitábamos restar una cierta fracción de una variable de otra variable. Combinando un circuito de división por constante con un circuito sustractor, podríamos obtener la función requerida:
Los dispositivos llamados computadoras analógicas solían ser comunes en universidades y tiendas de ingeniería, donde docenas de circuitos de amplificador operacional podían ser “parcheados” junto con cables de puente removibles para modelar declaraciones matemáticas, generalmente con el propósito de simular algún proceso físico cuyas ecuaciones subyacentes eran conocidos. Las computadoras digitales han hecho que las computadoras analógicas sean casi obsoletas, pero los circuitos computacionales analógicos no pueden ser superados por lo digital en términos de pura elegancia y economía de los componentes necesarios.
La circuitería computacional analógica sobresale en la realización de la integración y diferenciación de operaciones de cálculo con respecto al tiempo, mediante el uso de condensadores en un bucle de retroalimentación de amplificador operacional. Sin embargo, para comprender completamente el funcionamiento y las aplicaciones de estos circuitos, primero debemos comprender el significado de estos conceptos fundamentales de cálculo. Afortunadamente, la aplicación de circuitos de amplificador operacional a problemas del mundo real que involucran cálculos sirve como un excelente medio para enseñar cálculo básico. En palabras de John I. Smith, tomado de su destacado libro de texto, Modern Operational Circuit Design:
“Se ofrece una nota de aliento a ciertos lectores: el cálculo integral es una de las disciplinas matemáticas que explota la circuitería operativa [amplificador] y, en el proceso, más bien demuele como una barrera para la comprensión”. (pg. 4)
Los sentimientos del señor Smith sobre el valor pedagógico de los circuitos analógicos como herramienta de aprendizaje para las matemáticas no son únicos. Considera la opinión del ingeniero George Fox Lang, en un artículo que escribió para el número de agosto del 2000 de la revista Sound and Vibration, titulado “¡Analog was not a Computer Trademark!” :
“Crear una entidad física real (un circuito) gobernada por un conjunto particular de ecuaciones e interactuar con ella proporciona una visión única de esas afirmaciones matemáticas. No hay mejor manera de desarrollar un “instinto” para la interacción entre la física y las matemáticas que experimentar tal interacción. La computadora analógica era una poderosa herramienta de enseñanza interdisciplinaria; su obsolescencia es llorada por muchos educadores en una variedad de campos”. (pg. 23)
La diferenciación es la primera operación típicamente aprendida por los estudiantes principiantes de cálculo. En pocas palabras, la diferenciación es determinar la tasa de cambio instantánea de una variable en cuanto se relaciona con otra. En los circuitos diferenciadores analógicos, la variable independiente es el tiempo, por lo que las tasas de cambio que estamos tratando son tasas de cambio para una señal electrónica (voltaje o corriente) con respecto al tiempo.
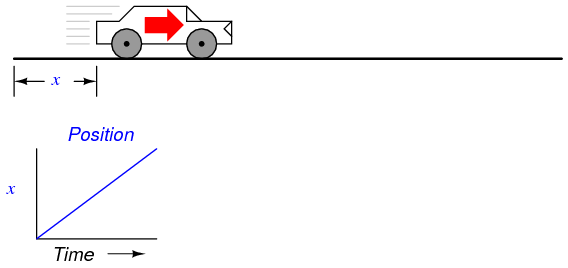
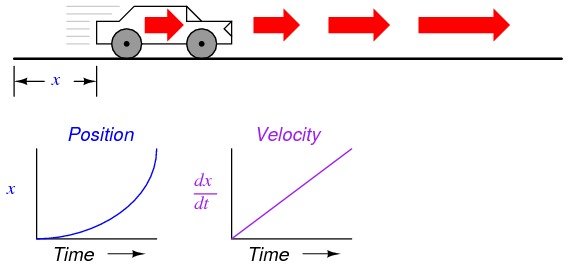
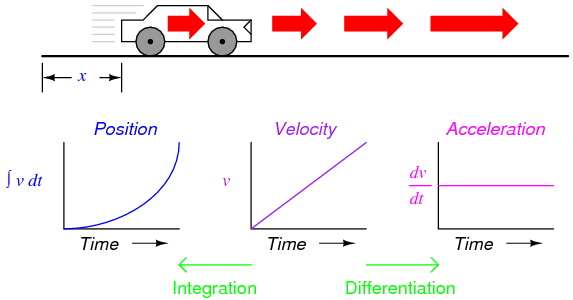
Supongamos que íbamos a medir la posición de un automóvil, viajando en un camino directo (sin giros), desde su punto de partida. Llamemos a esta medida, x. Si el automóvil se mueve a un ritmo tal que su distancia desde el “inicio” aumenta constantemente con el tiempo, su posición se trazará en una gráfica como una función lineal (línea recta):
Si calculáramos la derivada de la posición del automóvil con respecto al tiempo (es decir, determinar la tasa de cambio de la posición del automóvil con respecto al tiempo), llegaríamos a una cantidad que representa la velocidad del automóvil. La función de diferenciación está representada por la notación fraccionaria d/d, por lo que al diferenciar la posición (x) con respecto al tiempo (t), denotamos el resultado (la derivada) como dx/dt:
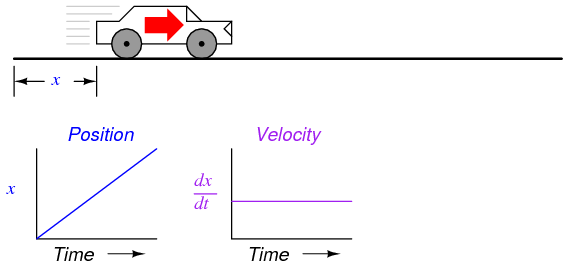
Para una gráfica lineal de x a lo largo del tiempo, el derivado de posición (dx/dt), de otro modo y más comúnmente conocido como velocidad, será una línea plana, invariable en valor. La derivada de una función matemática puede entenderse gráficamente como su pendiente cuando se traza en una gráfica, y aquí podemos ver que la gráfica de posición (x) tiene una pendiente constante, lo que significa que su derivada (dx/dt) debe ser constante en el tiempo.
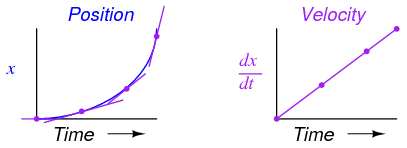
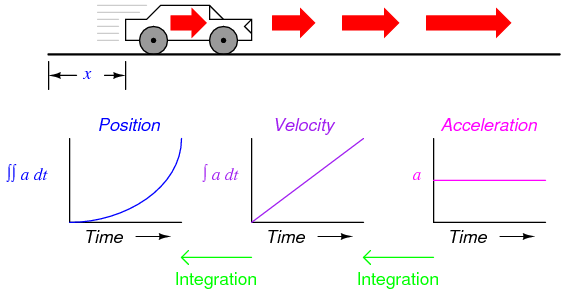
Ahora, supongamos que la distancia recorrida por el automóvil aumentó exponencialmente con el tiempo: es decir, comenzó su recorrido en movimientos lentos, pero cubrió más distancia adicional con cada periodo de paso en el tiempo. Entonces veríamos que la derivada de posición (dx/dt), también conocida como velocidad (v), no sería constante en el tiempo, sino que aumentaría:
La altura de los puntos en el gráfico de velocidad corresponde a las tasas de cambio, o pendiente, de los puntos en los momentos correspondientes en la gráfica de posición:
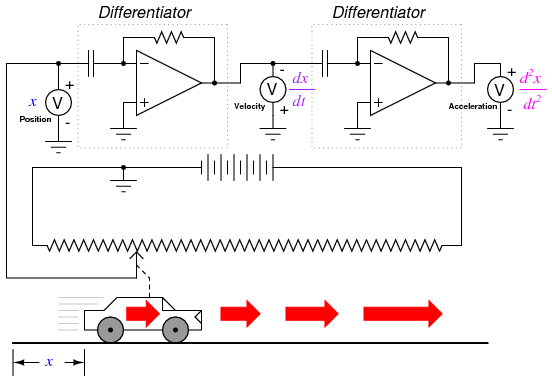
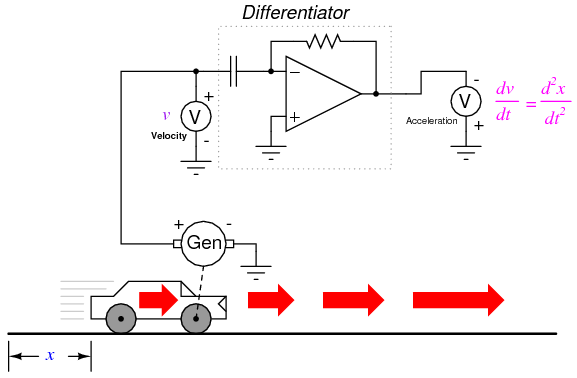
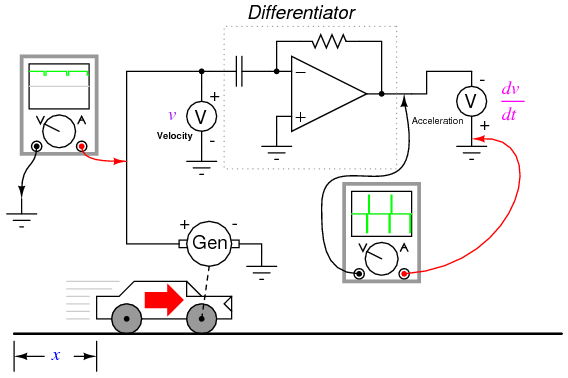
¿Qué tiene que ver esto con los circuitos electrónicos analógicos? Bueno, si tuviéramos que tener una señal analógica de voltaje que represente la posición del automóvil (piense en un potenciómetro enorme cuyo limpiaparabrisas estaba conectado al automóvil, generando una tensión proporcional a la posición del automóvil), podríamos conectar un circuito diferenciador a esta señal y tener el circuito continuamente calcular la velocidad del automóvil, mostrando el resultado a través de un voltímetro conectado a la salida del circuito diferenciador:
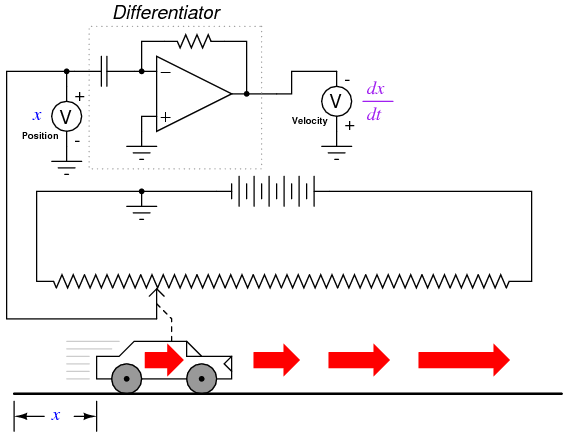
Recordemos del último capítulo que un circuito diferenciador emite un voltaje proporcional a la tasa de cambio del voltaje de entrada a lo largo del tiempo (d/dt). Por lo tanto, si el voltaje de entrada cambia con el tiempo a una tasa constante, el voltaje de salida estará en un valor constante. Si el automóvil se mueve de tal manera que su distancia transcurrida a lo largo del tiempo se acumula a una velocidad constante, entonces eso significa que el automóvil está viajando a una velocidad constante, y el circuito diferenciador emitirá una tensión constante proporcional a esa velocidad. Si la distancia transcurrido del automóvil a lo largo del tiempo cambia de manera no constante, la salida del circuito diferenciador tampoco será constante, pero siempre a un nivel representativo de la tasa de cambio de la entrada a lo largo del tiempo.
Tenga en cuenta que el voltímetro que registra la velocidad (en la salida del circuito diferenciador) está conectado en polaridad “inversa” a la salida del amplificador operacional. Esto se debe a que el circuito diferenciador mostrado está invirtiendo: emitiendo una tensión negativa para una tasa de cambio de voltaje de entrada positiva. Si deseamos que el voltímetro registre un valor positivo para la velocidad, tendrá que estar conectado al amplificador operacional como se muestra. Por poco práctico que pueda ser conectar un potenciómetro gigante a un objeto en movimiento como un automóvil, el concepto debe ser claro: al realizar electrónicamente la función de cálculo de diferenciación en una señal que representa la posición, obtenemos una señal que representa la velocidad.
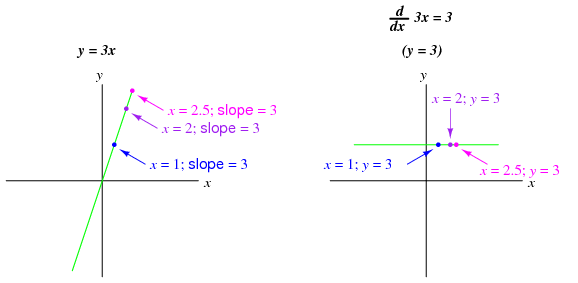
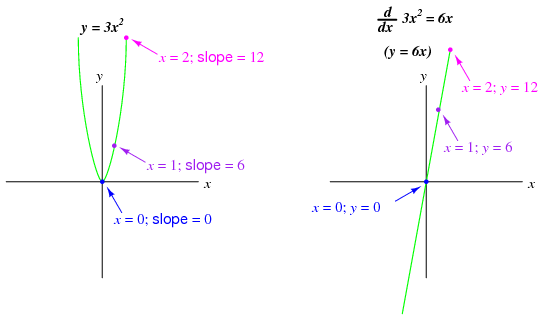
Los estudiantes de cálculo inicial aprenden técnicas simbólicas para la diferenciación. Sin embargo, esto requiere que se conozca la ecuación que describe la gráfica original. Por ejemplo, los estudiantes de cálculo aprenden a tomar una función como y = 3x y encontrar su derivada con respecto a x (d/dx), 3, simplemente manipulando la ecuación. Podemos verificar la exactitud de esta manipulación comparando las gráficas de las dos funciones:
Las funciones no lineales como y = 3x 2 también pueden diferenciarse por medios simbólicos. En este caso, la derivada de y = 3x 2 con respecto a x es 6x:
En la vida real, sin embargo, muchas veces no podemos describir el comportamiento de ningún evento físico mediante una ecuación simple como y = 3x, por lo que la diferenciación simbólica del tipo aprendido por los estudiantes de cálculo puede ser imposible de aplicar a una medición física. Si alguien deseara determinar la derivada de la posición de nuestro hipotético automóvil (dx/dt = velocidad) por medios simbólicos, primero tendría que obtener una ecuación que describa la posición del automóvil a lo largo del tiempo, basada en mediciones de posición tomadas de un experimento real, una tarea casi imposible a menos que se opera bajo condiciones cuidadosamente controladas que conducen a un gráfico de posición muy simple. Sin embargo, un circuito diferenciador analógico, al explotar el comportamiento de un condensador con respecto a voltaje, corriente y tiempo i = C (dv/dt), diferencia naturalmente cualquier señal real en relación con el tiempo, y sería capaz de emitir una señal correspondiente a la velocidad instantánea (dx/dt ) en cualquier momento. Al registrar la señal de posición del automóvil junto con la señal de salida del diferenciador utilizando un registrador gráfico u otro dispositivo de adquisición de datos, ambos gráficos se presentarían naturalmente para inspección y análisis.
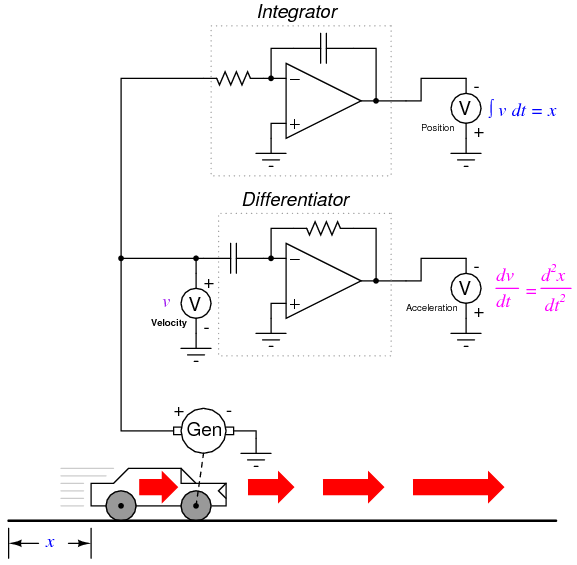
Podemos llevar el principio de diferenciación un paso más allá aplicándolo a la señal de velocidad usando otro circuito diferenciador. En otras palabras, utilícelo para calcular la tasa de cambio de velocidad, que sabemos que es la tasa de cambio de posición. ¿A qué medida práctica llegaríamos si hiciéramos esto? Piense en esto en términos de las unidades que utilizamos para medir la posición y la velocidad. Si mediéramos la posición del automóvil desde su punto de partida en millas, entonces probablemente expresaríamos su velocidad en unidades de millas por hora (dx/dt). Si tuviéramos que diferenciar la velocidad (medida en millas por hora) con respecto al tiempo, terminaríamos con una unidad de millas por hora por hora. Las clases introductorias de física enseñan a los estudiantes sobre el comportamiento de los objetos que caen, miden la posición en metros, la velocidad en metros por segundo y el cambio de velocidad a lo largo del tiempo en metros por segundo, por segundo. Esta medida final se llama aceleración: la tasa de cambio de velocidad a lo largo del tiempo:
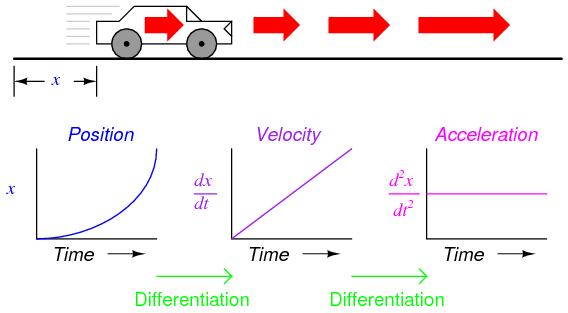
La expresión d 2 x/dt 2 se denomina la segunda derivada de la posición (x) con respecto al tiempo (t). Si tuviéramos que conectar un segundo circuito diferenciador a la salida del primero, el último voltímetro registraría la aceleración:
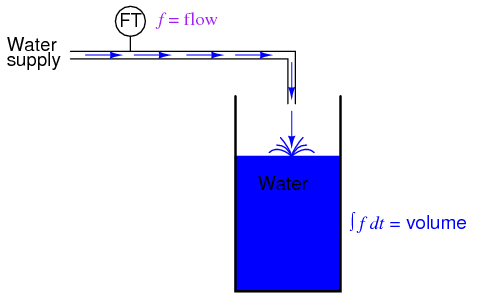
Derivando la velocidad de la posición, y la aceleración de la velocidad, vemos el principio de diferenciación muy claramente ilustrado. Estas no son las únicas medidas físicas relacionadas entre sí de esta manera, sino que son, quizás, las más comunes. Otro ejemplo de cálculo en acción es la relación entre el flujo de líquido (q) y el volumen de líquido (v) acumulado en un recipiente a lo largo del tiempo:
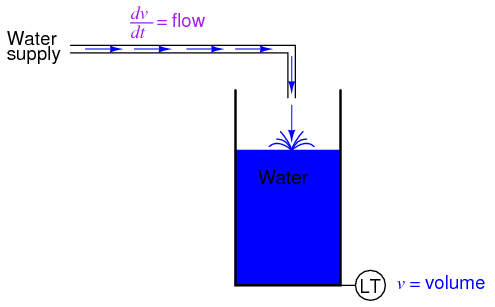
Un dispositivo “transmisor de nivel” montado en un tanque de almacenamiento de agua proporciona una señal directamente proporcional al nivel del agua en el tanque, que, si el tanque tiene un área transversal constante a lo largo de su altura, equipara directamente el volumen de agua almacenado. Si tuviéramos que tomar esta señal de volumen y diferenciarla con respecto al tiempo (dv/dt), obtendríamos una señal proporcional al caudal de agua a través de la tubería que transporta el agua al tanque. Un circuito diferenciador conectado de tal manera que reciba esta señal de volumen produciría una señal de salida proporcional al flujo, posiblemente sustituyendo un dispositivo de medición de flujo (“Transmisor de Flujo”) instalado en la tubería.
Volviendo al experimento del automóvil, supongamos que nuestro hipotético automóvil estaba equipado con un tacogenerador en una de las ruedas, produciendo una señal de voltaje directamente proporcional a la velocidad. Podríamos diferenciar la señal para obtener aceleración con un solo circuito, así:
Por su propia naturaleza, el tacogenerador diferencia la posición del automóvil con respecto al tiempo, generando un voltaje proporcional a la rapidez con la que cambia la posición angular de la rueda con el tiempo. Esto nos proporciona una señal bruta ya representativa de la velocidad, con un solo paso de diferenciación necesario para obtener una señal de aceleración. Un tacogenerador que mide la velocidad, por supuesto, es un ejemplo mucho más práctico de instrumentación automotriz que un potenciómetro gigante que mide su posición física, pero lo que ganamos en practicidad perdemos en la medición de posición. No importa cuántas veces nos diferenciemos, nunca podemos inferir la posición del automóvil a partir de una señal de velocidad. Si el proceso de diferenciación nos llevó de la posición a la velocidad y a la aceleración, entonces de alguna manera necesitamos realizar el proceso “inverso” de diferenciación para ir de velocidad a posición. Tal proceso matemático sí existe, y se le llama integración. El circuito “integrador” puede ser utilizado para realizar esta función de integración con respecto al tiempo:
Recordemos del último capítulo que un circuito integrador emite un voltaje cuya tasa de cambio a lo largo del tiempo es proporcional a la magnitud del voltaje de entrada. Así, dado un voltaje de entrada constante, el voltaje de salida cambiará a una velocidad constante. Si el automóvil viaja a una velocidad constante (entrada de voltaje constante al circuito integrador desde el tacogenerador), entonces su distancia recorrida aumentará constantemente a medida que avance el tiempo, y el integrador emitirá un voltaje constantemente cambiante proporcional a esa distancia. Si la velocidad del automóvil no es constante, entonces tampoco la tasa de cambio a lo largo del tiempo será de la salida del circuito integrador, pero el voltaje de salida representará fielmente la cantidad de distancia recorrida por el automóvil en un momento dado.
El símbolo de integración se parece a una letra “S” muy estrecha y cursiva (∫). La ecuación que utiliza este símbolo (∫ v dt = x) nos dice que estamos integrando la velocidad (v) con respecto al tiempo (dt), y obteniendo la posición (x) como resultado.
Entonces, podemos expresar tres medidas del movimiento del automóvil (posición, velocidad y aceleración) en términos de velocidad (v) tan fácilmente como podríamos en términos de posición (x):
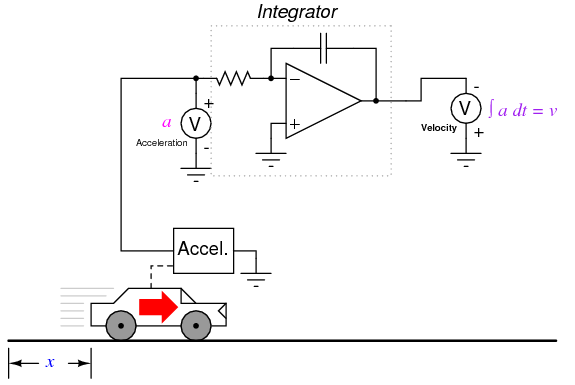
Si tuviéramos un acelerómetro conectado al carro, generando una señal proporcional a la velocidad de aceleración o desaceleración, podríamos (hipotéticamente) obtener una señal de velocidad con un paso de integración, y una señal de posición con un segundo paso de integración:
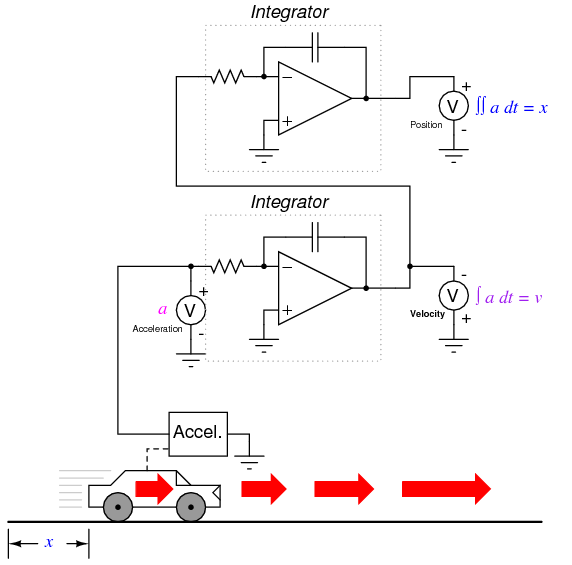
Por lo tanto, las tres medidas del movimiento del automóvil (posición, velocidad y aceleración) pueden expresarse en términos de aceleración:
Como habrás sospechado, el proceso de integración puede ser ilustrado en, y aplicado a, otros sistemas físicos también. Tomemos por ejemplo el tanque de almacenamiento de agua y el ejemplo de flujo mostrado anteriormente. Si el caudal es la derivada del volumen del tanque con respecto al tiempo (q = dv/dt), entonces también podríamos decir que el volumen es la integral del caudal con respecto al tiempo:
Si tuviéramos que usar un dispositivo “Transmisor de Flujo” para medir el flujo de agua, entonces por integración temporal podríamos calcular el volumen de agua acumulada en el tanque a lo largo del tiempo. Aunque teóricamente es posible utilizar un circuito integrador capacitivo de amplificador operacional para derivar una señal de volumen a partir de una señal de flujo, los dispositivos “integradores” electrónicos mecánicos y digitales son más adecuados para la integración durante largos períodos de tiempo, y encuentran un uso frecuente en el tratamiento y distribución del agua industrias.
Así como existen técnicas simbólicas para la diferenciación, también hay técnicas simbólicas para la integración, aunque tienden a ser más complejas y variadas. Sin embargo, aplicar la integración simbólica a un problema del mundo real como la aceleración de un automóvil todavía depende de la disponibilidad de una ecuación que describa con precisión la señal medida, a menudo algo difícil o imposible de derivar de los datos medidos. Sin embargo, los circuitos integradores electrónicos realizan esta función matemática de manera continua, en tiempo real, y para cualquier perfil de señal de entrada, proporcionando así una poderosa herramienta para científicos e ingenieros.
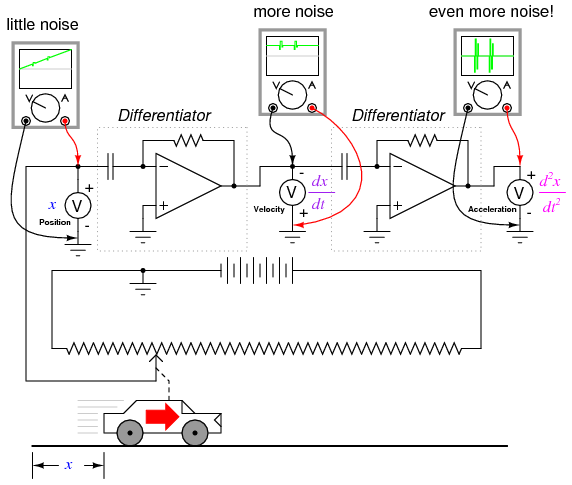
Dicho esto, hay advertencias sobre el uso de técnicas de cálculo para derivar un tipo de medición de otro. La diferenciación tiene la tendencia indeseable de amplificar el “ruido” que se encuentra en la variable medida, ya que el ruido aparecerá típicamente como frecuencias mucho más altas que la variable medida, y las frecuencias altas por su propia naturaleza poseen altas tasas de cambio a lo largo del tiempo.
Para ilustrar este problema, supongamos que estábamos derivando una medición de la aceleración del automóvil a partir de la señal de velocidad obtenida de un tacogenerador con escobillas desgastadas o barras de conmutación. Los puntos de mal contacto entre la escobilla y el conmutador producirán “caídas” momentáneas en el voltaje de salida del tacogenerador, y el circuito diferenciador conectado a él interpretará estas inmersiones como cambios muy rápidos en la velocidad. Para un automóvil que se mueve a velocidad constante, ni acelera ni desacelera, la señal de aceleración debe ser de 0 voltios, pero el “ruido” en la señal de velocidad causado por un tacogenerador defectuoso hará que la señal diferenciada (aceleración) contenga “picos”, indicando falsamente breves períodos de alta aceleración y desaceleración:
El voltaje de ruido presente en una señal a diferenciar no necesita ser de amplitud significativa para causar problemas: todo lo que se requiere es que el perfil de ruido tenga tiempos de subida o caída rápidos. En otras palabras, cualquier ruido eléctrico con un componente dv/dt alto será problemático cuando se diferencie, incluso si es de baja amplitud.
Cabe señalar que este problema no es un artefacto (un error idiosincrásico del instrumento de medición/computación) de la circuitería analógica; más bien, es inherente al proceso de diferenciación. No importa cómo podamos realizar la diferenciación, el “ruido” en la señal de velocidad invariablemente corromperá la señal de salida. Por supuesto, si estuviéramos diferenciando una señal dos veces, como hicimos para obtener tanto la velocidad como la aceleración a partir de una señal de posición, la señal de ruido amplificada emitida por el primer circuito diferenciador será amplificada nuevamente por el siguiente diferenciador, agravando así el problema:
La integración no sufre este problema, ya que los integradores actúan como filtros de paso bajo, atenuando las señales de entrada de alta frecuencia. En efecto, todos los picos altos y bajos resultantes del ruido en la señal se promedian juntos a lo largo del tiempo, para un resultado neto disminuido. Se podría suponer, entonces, que podríamos evitar todos los problemas midiendo la aceleración directamente e integrando esa señal para obtener velocidad; en efecto, calculando en “reversa” a partir de la forma mostrada anteriormente:
Desafortunadamente, seguir esta metodología podría llevarnos a otras dificultades, siendo una de ellas un artefacto común de los circuitos integradores analógicos conocidos como deriva. Todos los amplificadores operacionales tienen cierta cantidad de corriente de polarización de entrada, y esta corriente tenderá a causar que se acumule una carga en el condensador además de cualquier carga que se acumule como resultado de la señal de voltaje de entrada. Es decir, todos los circuitos integradores analógicos sufren la tendencia de tener su voltaje de salida “deriva” o “fluencia” incluso cuando no hay absolutamente ninguna entrada de voltaje, acumulando error a lo largo del tiempo como resultado. Además, los capacitores imperfectos tenderán a perder su carga almacenada con el tiempo debido a la resistencia interna, lo que resulta en una “deriva” hacia el voltaje de salida cero. Estos problemas son artefactos de los circuitos analógicos, y pueden eliminarse mediante el uso de cómputos digitales.
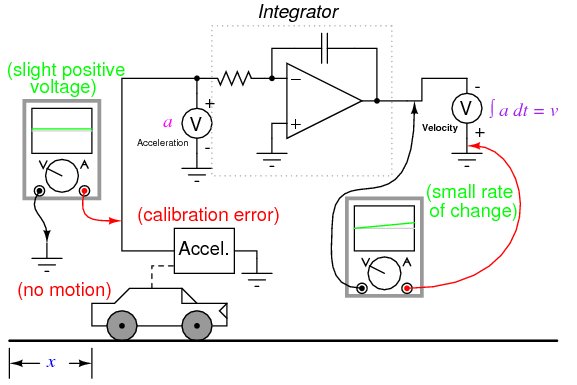
A pesar de los artefactos de circuito, los posibles errores pueden resultar de la integración de una medición (como la aceleración) para obtener otra (como la velocidad) simplemente por la forma en que funciona la integración. Si el punto de calibración “cero” del sensor de señal sin procesar no es perfecto, emitirá una ligera señal positiva o negativa incluso en condiciones en las que no debería emitir nada. Considere un automóvil con un acelerómetro imperfectamente calibrado, o uno que esté influenciado por la gravedad para detectar una ligera aceleración no relacionada con el movimiento del automóvil. Incluso con una computadora integradora perfecta, este error de sensor provocará que el integrador acumule error, resultando en una señal de salida que indica un cambio de velocidad cuando el automóvil no está acelerando ni desacelerando.
Al igual que con la diferenciación, este error también se agravará si la señal integrada se pasa a otro circuito integrador, ya que la salida “drifting” del primer integrador muy pronto presentará una señal positiva o negativa significativa para que se integre el siguiente integrador. Por lo tanto, se debe tener cuidado al integrar las señales del sensor: si el ajuste “cero” del sensor no es perfecto, el resultado integrado derivará, incluso si el circuito integrador en sí es perfecto.
Hasta el momento, los únicos errores de integración discutidos han sido de naturaleza artificial: originados por imperfecciones en los circuitos y sensores. También existe una fuente de error inherente al propio proceso de integración, y ese es el problema constante desconocido. Los estudiantes de cálculo inicial aprenden que cada vez que se integra una función, existe una constante desconocida (generalmente representada como la variable C) agregada al resultado. Esta incertidumbre es más fácil de entender comparando las derivadas de varias funciones que difieren solo por la adición de un valor constante:
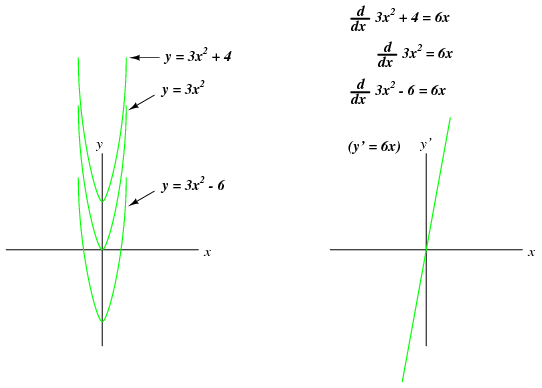
Observe cómo cada una de las curvas parabólicas (y = 3x 2 + C) comparten exactamente la misma forma, diferenciándose entre sí en cuanto a su desplazamiento vertical. Sin embargo, todos comparten exactamente la misma función derivada: y' = (d/dx) (3x 2 + C) = 6x, porque todos comparten tasas idénticas de cambio (pendientes) en los puntos correspondientes a lo largo del eje x. Si bien esto parece bastante natural y esperado desde la perspectiva de la diferenciación (diferentes ecuaciones que comparten una derivada común), suele parecer extraño a los estudiantes principiantes desde la perspectiva de la integración, porque existen múltiples respuestas correctas para la integral de una función. Pasando de una ecuación a su derivada, sólo hay una respuesta, pero pasar de esa derivada de nuevo a la ecuación original nos lleva a una gama de soluciones correctas. En honor a esta incertidumbre, la función simbólica de la integración se llama la integral indefinida.
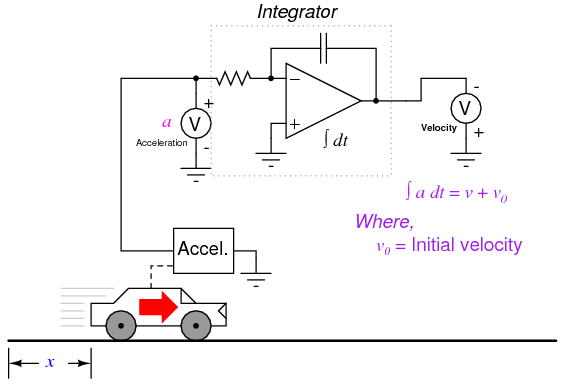
Cuando un integrador realiza integración de señal en vivo con respecto al tiempo, la salida es la suma de la señal de entrada integrada a lo largo del tiempo y un valor inicial de magnitud arbitraria, que representa la salida preexistente del integrador en el momento en que comenzó la integración. Por ejemplo, si integro la velocidad de un automóvil conduciendo en línea recta lejos de una ciudad, calculando que una velocidad constante de 50 millas por hora en un tiempo de 2 horas producirá una distancia (∫ v dt) de 100 millas, eso no significa necesariamente que el automóvil esté a 100 millas de distancia de la ciudad después de 2 horas. Todo lo que nos dice es que el auto estará a 100 millas más lejos de la ciudad después de 2 horas de manejo. La distancia real de la ciudad después de 2 horas de manejo depende de qué tan lejos estaba el automóvil de la ciudad cuando comenzó la integración. Si no conocemos este valor inicial para la distancia, no podemos determinar la distancia exacta del automóvil a la ciudad después de 2 horas de manejo.
Este mismo problema aparece cuando integramos la aceleración con respecto al tiempo para obtener velocidad:
En este sistema integrador, la velocidad calculada del carro solo será válida si el circuito integrador se inicializa a un valor de salida de cero cuando el carro está parado (v = 0). De lo contrario, el integrador muy bien podría estar emitiendo una señal distinta de cero para la velocidad (v 0) cuando el automóvil está parado, ya que el acelerómetro no puede decir la diferencia entre un estado estacionario (0 millas por hora) y un estado de velocidad constante (digamos, 60 millas por hora, inmutable). Esta incertidumbre en la salida del integrador es inherente al proceso de integración, y no a un artefacto de la circuitería o del sensor.
En resumen, si se desea la máxima precisión para cualquier medición física, lo mejor es medir esa variable directamente en lugar de calcularla a partir de otras mediciones. Esto no quiere decir que el cálculo no valga nada. Todo lo contrario, muchas veces es el único medio práctico para obtener una medición deseada. Sin embargo, los límites de cómputos deben ser entendidos y respetados para que se obtengan mediciones precisas.