
11.1: Modulación por Ancho de Pulso
- Page ID
- 153672

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)La modulación por ancho de pulso (PWM) utiliza señales digitales para controlar las aplicaciones de potencia, además de ser bastante fácil de convertir de nuevo a analógico con un mínimo de hardware.
Los sistemas analógicos, como las fuentes de alimentación lineales, tienden a generar mucho calor ya que son básicamente resistencias variables que transportan mucha corriente. Los sistemas digitales generalmente no generan tanto calor. Casi todo el calor generado por un dispositivo de conmutación es durante la transición (que se realiza rápidamente), mientras que el dispositivo no está encendido ni apagado, sino en el medio. Esto se debe a que el poder sigue la siguiente fórmula:
P = E I, o Vatios = Voltaje X Corriente
Si el voltaje o la corriente están cerca de cero, entonces la potencia estará cerca de cero. PWM aprovecha al máximo este hecho.
PWM puede tener muchas de las características de un sistema de control analógico, en el sentido de que la señal digital puede ser rueda libre. PWM no tiene que capturar datos, aunque hay excepciones a esto con controladores de gama alta.
Ciclo de Trabajo
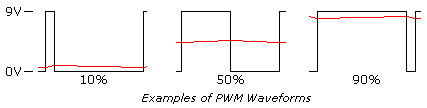
Uno de los parámetros de cualquier onda cuadrada es el ciclo de trabajo. La mayoría de las ondas cuadradas son 50%, esta es la norma a la hora de discutirlas, pero no tienen que ser simétricas. El tiempo ON se puede variar completamente entre la señal que está apagada a estar completamente encendida, 0% a 100%, y todos los rangos entre.
A continuación se muestran ejemplos de un ciclo de trabajo del 10%, 50% y 90%. Si bien la frecuencia es la misma para cada uno, esto no es un requisito.
La razón por la que PWM es popular es simple. Muchas cargas, como las resistencias, integran la potencia en un número que coincide con el porcentaje. La conversión a su valor equivalente analógico es sencilla. Los LEDs son muy no lineales en su respuesta a la corriente, le dan a un LED la mitad de su corriente nominal y aún así obtienes más de la mitad de la luz que el LED puede producir. Con PWM el nivel de luz producido por el LED es muy lineal. Los motores, que se cubrirán más adelante, también son muy receptivos a PWM.
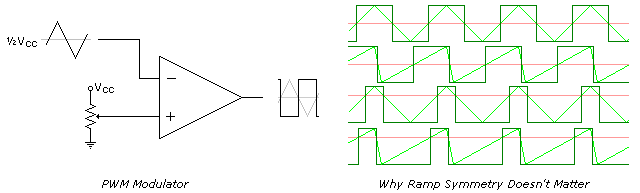
Una de las varias formas en que se puede producir PWM es mediante el uso de una forma de onda de diente de sierra y un comparador. Como se muestra a continuación, el diente de sierra (o onda triangular) no necesita ser simétrico, pero la linealidad de la forma de onda es importante. La frecuencia de la forma de onda de diente de sierra es la frecuencia de muestreo de la señal.
Si no hay ningún cálculo involucrado PWM puede ser rápido. El factor limitante es la respuesta de frecuencia de los comparadores. Esto puede no ser un problema ya que bastantes de los usos son de velocidad bastante baja. Algunos microcontroladores tienen PWM incorporado y pueden grabar o crear señales bajo demanda.
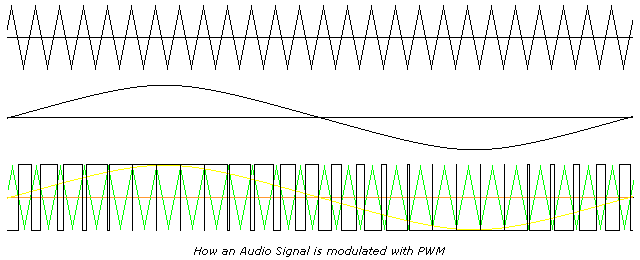
Los usos de PWM varían ampliamente. Es el corazón de los amplificadores de audio Clase D, al aumentar los voltajes se aumenta la salida máxima, y al seleccionar una frecuencia más allá del oído humano (típicamente 44Khz) se puede utilizar PWM. Los altavoces no responden a la alta frecuencia sino duplican la baja frecuencia, que es la señal de audio. Se pueden usar velocidades de muestreo más altas para una fidelidad aún mejor, y 100 Khz o mucho más no es inaudito.
Otra aplicación popular es el control de velocidad del motor. Los motores como clase requieren corrientes muy altas para operar. Poder variar su velocidad con PWM aumenta bastante la eficiencia del sistema total. PWM es más efectivo para controlar las velocidades del motor a bajas RPM que los métodos lineales.
Puentes H
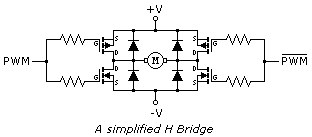
PWM se usa a menudo junto con un H-Bridge. Esta configuración se llama así porque se asemeja a la letra H, y permite que el voltaje efectivo a través de la carga se duplique ya que la fuente de alimentación se puede conmutar a ambos lados de la carga. En el caso de las cargas inductivas, como los motores, se utilizan diodos para suprimir picos inductivos, que pueden dañar los transistores. La inductancia en un motor también tiende a rechazar la componente de alta frecuencia de la forma de onda. Esta configuración también se puede utilizar con altavoces para amplificadores de audio Clase D.
Si bien básicamente es preciso, este esquema de un puente H tiene un defecto grave, es posible mientras se realiza la transición entre los MOSFET que ambos transistores en la parte superior e inferior estén encendidos simultáneamente, y se llevarán la peor parte de lo que la fuente de alimentación puede proporcionar. Esta condición se conoce como disparo a través y puede ocurrir con cualquier tipo de transistor utilizado en un H-Bridge. Si la fuente de alimentación es lo suficientemente potente los transistores no sobrevivirán. Se maneja mediante el uso de controladores frente a los transistores que permiten que uno se apague antes de permitir que el otro se encienda.
Fuentes de alimentación de modo de conmutación
Las fuentes de alimentación de modo conmutado (SMPS) también pueden usar PWM, aunque también existen otros métodos. Agregar topologías que utilizan la energía almacenada tanto en inductores como en condensadores después de los componentes principales de conmutación puede aumentar las eficiencias de estos dispositivos bastante altas, superando el 90% en algunos casos. A continuación se muestra un ejemplo de tal configuración.
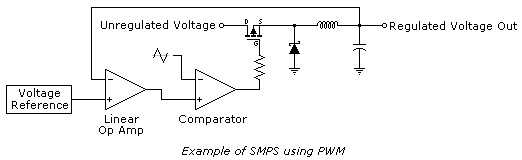
La eficiencia, en este caso, se mide como potencia. Si tiene un SMPS con 90% de eficiencia y convierte 12VDC a 5VDC a 10 Amps, el lado de 12V estará tirando aproximadamente 4.6 Amperios. El 10% (5 watts) no contabilizados se mostrará como calor residual. Si bien es un poco más ruidoso, este tipo de regulador funcionará mucho más frío que su contraparte lineal.