
13.10: Otros Motores Especializados
- Page ID
- 153252

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Motor de inducción de polo sombreado
Una manera fácil de proporcionar par de arranque a un motor monofásico es incrustar un giro en cortocircuito en cada polo a 30 o a 60 o al devanado principal. (Figura abajo) Por lo general, 1/3 del poste está encerrado por una correa de cobre desnuda. Estas bobinas de sombreado producen un flujo amortiguado retardado en el tiempo espaciado 30 o a 60 o del campo principal. Este flujo rezagado con el componente principal no amortiguado, produce un campo giratorio con un pequeño par para arrancar el rotor.
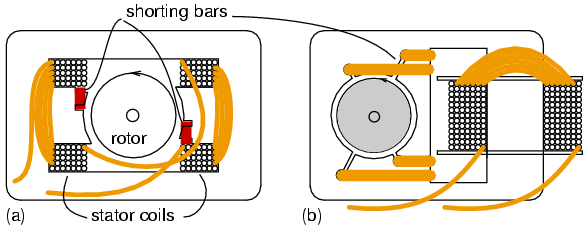
Motor de inducción de polo sombreado, (a) diseño de doble bobina, (b) versión de bobina simple más pequeña
El par de arranque es tan bajo que los motores de polo sombreado solo se fabrican en tamaños más pequeños, por debajo de los 50 vatios. Bajo costo y simplicidad se adaptan a este motor para ventiladores pequeños, circuladores de aire y otras aplicaciones de bajo par. La velocidad del motor se puede reducir cambiando la reactancia en serie para limitar la corriente y el par, o cambiando las tomas de bobina del motor como en la figura a continuación.
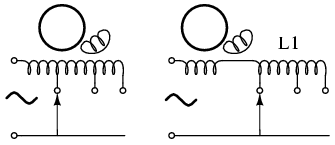
Control de velocidad del motor de polo sombreado.
Servomotor bifásico
Un servomotor es típicamente parte de un bucle de retroalimentación que contiene componentes electrónicos, mecánicos y eléctricos. El servo loop es un medio para controlar el movimiento de un objeto a través del motor. Un requisito de muchos de estos sistemas es la respuesta rápida. Para reducir la aceleración robando inercial, el núcleo de hierro se retira del rotor dejando solo una copa de aluminio montada en el eje para girar. (Figura abajo) El núcleo de hierro se reinserta dentro de la copa como un componente estático (no giratorio) para completar el circuito magnético. De lo contrario, la construcción es típica de un motor bifásico. El rotor de baja masa puede acelerar más rápidamente que un rotor de jaula de ardilla.
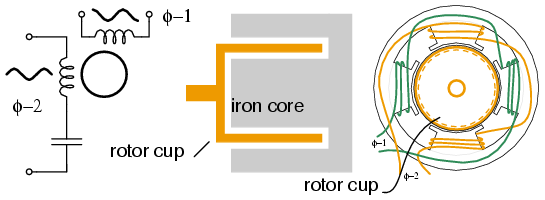
Servomotor de alta aceleración de 2 φ CA.
Una fase está conectada a la línea monofásica; la otra es accionada por un amplificador. Uno de los devanados es accionado por una forma de onda desplazada en fase de 90 o. En la figura anterior, esto se logra mediante un condensador en serie en el devanado de la línea eléctrica. El otro devanado es accionado por una onda sinusoidal de amplitud variable para controlar la velocidad del motor. La fase de la forma de onda puede invertirse (desplazamiento de fase de 180 o) para invertir la dirección del motor. Esta onda sinusoidal variable es la salida de un amplificador de error. Ver sección CT sincro por ejemplo. Las superficies de control de la aeronave pueden colocarse mediante servomotores de 400 Hz y 2 φ.
Motor de histéresis
Si el rotor laminado de acero Si-acero de baja histéresis de un motor de inducción es reemplazado por un cilindro sin viento sin ranuras de acero magnético endurecido, la histéresis, o retraso de la magnetización del rotor, se acentúa mucho. El motor síncrono de par bajo resultante desarrolla un par constante desde la velocidad de calado hasta la velocidad Debido al bajo par, el motor de histéresis solo está disponible en tamaños muy pequeños, y solo se usa para aplicaciones de velocidad constante como unidades de reloj y anteriormente, tocadiscos de fonógrafo.
Embrague por corrientes F
Si el estator de un motor de inducción o un motor síncrono está montado para girar independientemente del rotor, se produce un embrague de corriente parásita. Las bobinas se excitan con CC y se unen a la carga mecánica. El rotor de jaula de ardilla está unido al motor de accionamiento. El motor de accionamiento se inicia sin excitación de CC en el embrague. La excitación de CC se ajusta de cero al valor final deseado proporcionando un par continuo y suavemente variable. El funcionamiento del embrague de corrientes parásitas es similar a un velocímetro automotriz de corrientes parásitas analógico.
Resumen: Otros motores especializados
- El motor de inducción de polo sombreado, utilizado en aplicaciones de bajo par de 50 vatios, desarrolla una segunda fase a partir de giros en cortocircuito en el estator.
- Los motores de histéresis son un pequeño motor síncrono de par bajo que alguna vez se usó en relojes y fonógrafos.
- El embrague de corrientes parásitas proporciona un par ajustable.