
11.4: Aplicaciones
- Page ID
- 125822
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Sistemas de comunicaciones inalámbricas
La Sección 11.4.1 introduce sistemas de comunicaciones simples sin usar las ecuaciones de Maxwell y la Sección 11.4.2 luego analiza los sistemas de radar y LIDAR utilizados para vigilancia e investigación. Las comunicaciones ópticas se aplaza al Capítulo 12, mientras que el diseño, transformación y conmutación de las propias señales de comunicación son cuestiones dejadas a otros textos.
Los sistemas de comunicaciones inalámbricas tienen una larga historia, comenzando con los sistemas de telégrafo inalámbrico instalados varios años después de las demostraciones del laboratorio de Hertz de enlaces inalámbricos a finales del siglo XIX. Estos sistemas suelen utilizar trayectorias de propagación de línea de visión y, a veces, reflexiones ionosféricas intercontinentales. Siguieron los sistemas de teléfono, radio y televisión. A mediados del siglo XX, los enlaces inalámbricos interestatales e internacionales más largos fueron reemplazados casi por completo por cables coaxiales y enlaces de microondas multi-salto más capaces y confiables. Estos pronto se complementaron con enlaces satelitales que normalmente operan a frecuencias de hasta ~14 GHz; hoy en día se utilizan frecuencias de hasta ~100 GHz. A finales de siglo, estos enlaces de microondas más largos fueron reemplazados en gran medida nuevamente, esta vez por fibras ópticas con anchos de banda de Terahertz. Al mismo tiempo, muchos de los enlaces más cortos están siendo reemplazados o complementados por la tecnología celular inalámbrica, lo que se hizo práctico por el desarrollo de circuitos integrados de r.f. económicos. Cada avance técnico impulsó notablemente la capacidad y la penetración en el mercado, y en general aumentó el rendimiento y la movilidad de los usuarios al tiempo que reducía
La mayoría de los hogares y oficinas de Estados Unidos están actualmente atendidos por pares trenzados de cables telefónicos, cada uno capaz de transportar ~50 kbs - 1.5 Mbps, aunque los cables coaxiales, los enlaces satelitales y los servicios inalámbricos están haciendo avances significativos. Los servicios inalámbricos más comunes actualmente incluyen teléfonos celulares, teléfonos inalámbricos (dentro de un hogar u oficina), conexiones inalámbricas a Internet, conexiones inalámbricas dentro del hogar e intraoficina, walkie-talkies (enlaces móviles dedicados), enlaces satelitales, enlaces de torre de microondas y muchas variaciones especializadas diseñadas para uso privado o militar. Además, los enlaces de línea de visión óptica o de microondas entre edificios ofrecen conectividad instantánea de banda ancha para la “última milla” a algunos usuarios; la última milla representa una fracción significativa de todo el costo de la planta instalada. El clima generalmente restringe los enlaces ópticos a lúpulos muy cortos o a fibras ópticas independientes del clima. También se están desarrollando dispositivos médicos inalámbricos especializados, como enlaces de RF a cámaras de video dentro de píldoras tragadas.
Los servicios de difusión ahora incluyen radio AM cerca de 1 MHz, radio FM cerca de 100 MHz y frecuencias más altas, TV en varias bandas entre 50 y 600 MHz para servicio local por aire, y TV y radio entregados por satélite a ~4, ~12 y ~20 GHz. La radio de onda corta por debajo de ~30 MHz también ofrece transmisiones internacionales globales que dependen de las condiciones ionosféricas, y es ampliamente utilizada por los jamones de radio para comunicaciones de larga distancia.
Los servicios inalámbricos están tan extendidos hoy en día que podemos darlos por sentado, olvidando que hace unas generaciones el concepto mismo de comunicarse por ondas de radio silenciosas invisibles se consideraba mágico. A pesar de la amplia gama de servicios ya en uso, es razonable suponer que en las próximas décadas, los estudiantes de ingeniería de hoy desarrollarán otras numerosas tecnologías y servicios inalámbricos.
Los sistemas de comunicaciones transmiten información entre dos o más nodos, generalmente a través de cables, medios inalámbricos o fibras ópticas. Después de una breve discusión sobre las velocidades de señalización (bits por segundo) con la potencia de señal requerida en el receptor inalámbrico, esta sección analiza en términos generales el lanzamiento, propagación y recepción de señales y mensajes electromagnéticos en sistemas cableados e inalámbricos.
La información se mide típicamente en bits. Un poco de información es el contenido de información de una sola decisión sí-no, donde cada resultado es igualmente probable. Una cadena de M dígitos binarios (0 o 1 equiprobables) transmite M bits de información. Una señal analógica medida con una precisión de una parte en 2M también transporta M bits porque un número binario único de M bits corresponde a cada valor analógico discernible. Así, tanto las señales analógicas como las digitales pueden caracterizarse en términos de los bits de información que transmiten. Todos los receptores inalámbricos requieren que la energía recibida por bit supere un mínimo aproximado de w o 10 -20 Julios/bit, aunque la mayoría de los sistemas prácticos son órdenes de magnitud menos sensibles. 59
59 La mayoría de los buenos sistemas de comunicaciones pueden operar con probabilidades aceptables de error si E b /N o >~10, donde E b es la energía por bit y N o = kT es la densidad de potencia de ruido [W Hz -1] = [J]. La constante de Boltzmann k 1.38×10 -23 [J o K -1], y T es la temperatura del ruido del sistema, que podría aproximarse a 100K en un buen sistema a frecuencias de RF. Así, la energía mínima nominal E b requerida para detectar cada bit de información es ~10N o 10 -20 [J].
Para transportar N bits por segundo [b s -1] de información, por lo tanto, se requiere que al menos ~Nw o vatios [W] sean interceptados por el receptor, y que se transmita sustancialmente más potencia. Obsérvese que [W] = [J s -1] = [J b -1] [b s -1]. Las comunicaciones inalámbricas son prácticas porque en realidad se requiere muy poca potencia P r en el receptor. Por ejemplo, para comunicar 100 megabits por segundo (Mbps) se requiere tan poco como un picovatio (10 -12 W) en el receptor si w o = 10 -20; es decir, requerimos P r > Nw o 10 ×10 -20 = 10 -12 [W].
Es una suerte que los receptores de radio sean tan sensibles, porque sólo una pequeña fracción de la potencia transmitida suele llegar a ellos. En la mayoría de los casos la pérdida de trayectoria entre transmisor y receptor es principalmente geométrica; la radiación viaja en líneas rectas alejándose de la antena transmisora con una intensidad I [W m -2] que se debilita con la distancia r como r -2. Por ejemplo, si el transmisor es isotrópico e irradia su potencia P t por igual en las 4\(\pi\) direcciones, entonces I (θ\(\phi\),, r) = P t /4\(\pi\) r 2 [W m -2]. La potencia Pr interceptada por la antena receptora es proporcional a la intensidad de onda incidente I (θ,\(\phi\)) y el área efectiva de la antena receptora A (θ,\(\phi\)) [m 2], o “sección transversal de captura”, donde la potencia P r recibida de una onda plana incidente desde dirección θ,\(\phi\) es:
\[\mathrm{P}_{\mathrm{r}}=\mathrm{I}(\theta, \phi, \mathrm{r}) \mathrm{A}(\theta, \phi) \ [\mathrm{W}] \qquad \qquad \qquad \text{(antenna gain)} \label{11.4.1}\]
La potencia recibida de una antena transmisora isotrópica es, por lo tanto, P r = (Pt/4\(\pi\) r 2) A (θ,\(\phi\)), por lo que en este caso especial la pérdida de trayectoria de línea de visión entre transmisor y receptor es P r/P t = A (θ,\(\phi\)) /4\(\pi\) r 2, o esa área fraccional de una esfera de radio r representada por la sección transversal de la antena receptora A. A veces se deben reconocer también pérdidas de propagación adicionales por lluvia, absorción gaseosa o dispersión, como se discute en la Sección 11.3.2.
En general, sin embargo, la antena transmisora no es isotrópica, sino que está diseñada para irradiar potencia preferentemente en la dirección de los receptores. Definimos la ganancia de antena G (θ,\(\phi\)), a menudo llamada “ganancia sobre isotrópica”, como la relación de la intensidad I (θ,\(\phi\), r) [W m -2] de las ondas transmitidas en la dirección θ,\(\phi\) (coordenadas esféricas) a la distancia r, a la intensidad que sería transmitida por un isotrópico antena. Es decir:
\[\mathrm{G}(\theta, \phi) \equiv \frac{\mathrm{I}(\theta, \phi, \mathrm{r})}{\mathrm{P}_{\mathrm{t}} / 4 \pi \mathrm{r}^{2}} \qquad \qquad \qquad \text{(antenna gain)} \label{11.4.2}\]
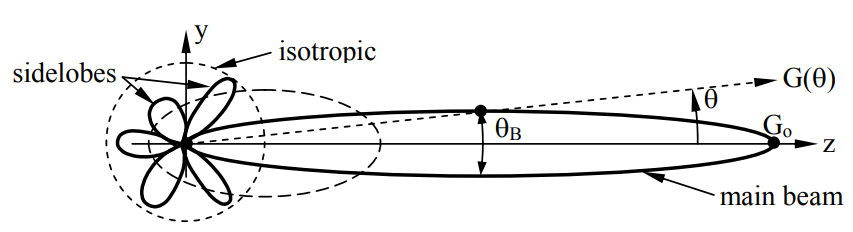
Si se conserva la potencia radiada, entonces la integral de la intensidad de onda sobre una superficie esférica que encierra la antena es independiente del radio r de la esfera. Por lo tanto, la distribución angular de potencia y G (θ,\(\phi\)) trazadas en coordenadas esféricas se comportan como un globo que debe empujar hacia fuera en algún lugar cuando es empujado hacia adentro en otro lugar, como se sugiere en la Figura 11.4.1. La ganancia máxima G o a menudo define el eje z y se denomina ganancia en el eje. El ancho angular θ B del haz principal en los puntos de media potencia donde G (θ,\(\phi\)) G o /2 se denomina ancho de haz de antena o “ancho de haz de media potencia”. Otros picos locales en ganancia se llaman lóbulos laterales, y esos lóbulos laterales detrás de la antena a menudo se llaman lóbulos traseros. Los ángulos en los que la ganancia es casi cero se denominan nulos.
Las antenas con G (θ,\(\phi\)) > 1 generalmente enfocan su energía radiada usando lentes, espejos o radiadores múltiples en fase para que sus contribuciones radiadas se agreguen en fase en la dirección deseada, y cancelen en gran medida de lo contrario. Las ganancias típicas para la mayoría de las antenas de cable oscilan entre ~1.5 y ~100, y las antenas de gran apertura, como las placas parabólicas o los sistemas ópticos, pueden tener ganancias de 10 a 8 o más. La direccionalidad o ganancia de un espejo o cualquier sistema de antena es generalmente la misma ya sea que esté transmitiendo o recibiendo. 60 Los fundamentos de transmisión y recepción se presentan con más detalle en la Sección 10.3.1.
60 El grado de enfoque es el mismo tanto si las ondas se transmiten como si se reciben. Es decir, si invertimos la dirección del tiempo para una solución válida de ondas electromagnéticas a las ecuaciones de Maxwell, el resultado también es una solución válida si el sistema es sin pérdidas y recíproco. La reciprocidad requiere que las matrices complejas que caracterizan\(\underline{\varepsilon}\)\( \underline{\mu}\), y\( \underline{\sigma}\) cerca de la antena igualen sus propias transposiciones; esto excluye plasmas magnetizados como la ionosfera, y ferritas magnetizadas, como se discute más adelante en la Sección 10.3.4.
Considera el siguiente ejemplo típico. Una estación de televisión transmite 100 kW a ~100 MHz hacia el horizonte con una ganancia de antena de ~10. Debido a que la ganancia es mucho mayor que la unidad en la dirección horizontal deseada, es por lo tanto menor que la unidad para la mayoría de las otras direcciones hacia abajo y hacia arriba donde los usuarios están cerca o ausentes. La intensidad I [W m -2] detectada por los usuarios en el horizonte a 100 km de alcance sigue de (\ ref {11.4.2}):
\[\mathrm{I} \cong \mathrm{G} \frac{\mathrm{P}_{\mathrm{t}}}{4 \pi \mathrm{r}^{2}}=10 \times \frac{10^{5}}{4 \pi\left(10^{5}\right)^{2}} \cong 10^{-5}\ \left[\mathrm{W} / \mathrm{m}^{2}\right]\label{11.4.3}\]
Si esta intensidad es suficiente depende de las propiedades de la antena receptora y del receptor. Para el ejemplo de la Ecuación (\ ref {11.4.3}), una antena de TV típica con un área efectiva A 2 [m 2] capturaría IA 10 -5 [W/m 2] × 2 [m 2] = 2×10 -5 [W]. Si la potencia recibida es\(\left\langle\mathrm{v}^{2}(\mathrm{t})\right\rangle / \mathrm{R} \cong 2 \times 10^{-5} \ [\mathrm{W}] \), y el receptor tiene una impedancia de entrada R de 100 ohmios, entonces la tensión cuadrática media (rms)\(\mathrm{v}_{\mathrm{rms}} \equiv\left\langle\mathrm{v}^{2}(\mathrm{t})\right\rangle^{0.5} \) sería de (0.002) 0.5 14 mv, mucho mayor que los niveles de ruido típicos en los receptores de TV (~10 μv). 61
61 Los receptores de TV típicos podrían tener un voltaje de ruido superpuesto de potencia N = kTb [W], donde la temperatura de ruido del sistema T podría ser de ~10 4 K (mucho es interferencia), la constante de Boltzmann k = 1.38×10 -23, y B es ancho de banda [Hz]. B 6 MHz para televisión por aire. Por lo tanto N 1.38×10 -23 ×10 4 ×6×10 6 8×10 -13 watts, y una buena relación señal-ruido de TV S/N de ~10 4 requiere solamente ~ 8×10 -9 vatios de señal S. Desde N n rms 2 /R, el voltaje de ruido rms (NR) 0.5, o ~10 μv si la impedancia de entrada del receptor R = 100 ohmios.
Debido a que la mayoría de las antenas están igualmente enfocadas ya sea que estén recibiendo o transmitiendo, su área efectiva A (θ\(\phi\)) y ganancia G (θ,\(\phi\)) están estrechamente relacionadas:
\[\mathrm{G}(\theta, \phi)=\frac{4 \pi}{\lambda^{2}} \mathrm{A}(\theta, \phi) \label{11.4.4}\]
Por lo tanto, la ganancia en el eje\( \mathrm{G}_{\mathrm{o}}=4 \pi \mathrm{A}_{\mathrm{o}} / \lambda^{2}\). Esta relación (\ ref {11.4.4}) fue probada para una antena dipolo corta en la Sección 10.3.3 y probada para otros tipos de antena en la Sección 10.3.4, aunque la prueba aquí no es necesaria. Esta relación suele ser útil para estimar la ganancia máxima de antenas de apertura como espejos parabólicos o lentes porque su área efectiva máxima A o a menudo se aproxima a su sección transversal física A p dentro de un factor de dos; típicamente A o 0.6 A p. Sin embargo, esta aproximación no se aplica a las antenas de cable. Por lo tanto, podemos estimar fácilmente la ganancia en el eje de tales antenas de apertura:
\[\mathrm{G}_{\mathrm{o}}=0.6 \times \frac{4 \pi}{\lambda^{2}} \mathrm{A}_{\mathrm{o}} \label{11.4.5}\]
Combinando (\ ref {11.4.1}) y (\ ref {11.4.3}) produce la expresión de enlace para la potencia recibida:
\[\mathrm{P}_{\mathrm{r}}=\mathrm{G}_{\mathrm{t}} \frac{\mathrm{P}_{\mathrm{t}}}{4 \pi \mathrm{r}^{2}} \mathrm{A}_{\mathrm{r}} \ [\mathrm{W}] \qquad \qquad \qquad \text{(link expression) } \label{11.4.6}\]
donde G t es la ganancia de la antena transmisora y A r es el área efectiva de la antena receptora. La velocidad de datos R asociada a esta potencia recibida es: R = P r /E b [bits s -1].
Un segundo ejemplo ilustra cómo podría funcionar un sistema de comunicaciones. Considera un satélite de comunicaciones geosincrónicas 62 que transmite señales de televisión de alta definición (HDTV) de 12 GHz a 20 Mbps a hogares con platillos de 1 metro, y supongamos que la antena satelital extiende su potencia P t aproximadamente por igual sobre el este de Estados Unidos, digamos 3×10 6 km 2. Entonces la intensidad de las olas que caen sobre Estados Unidos es: I P t/(3×10 12) [W m -2], y la potencia P r recibida por una antena con área efectiva A o 0.6 [m 2] es:
\[\mathrm{P}_{\mathrm{r}}=\mathrm{A}_{\mathrm{o}} \mathrm{I}=0.6 \frac{\mathrm{P}_{\mathrm{t}}}{3 \times 10^{12}}=2 \times 10^{-13} \mathrm{P}_{\mathrm{t}} \ [\mathrm{W}] \label{11.4.7}\]
62 Un satélite aproximadamente a 35,000 km por encima del ecuador rodea la tierra en 24 horas al mismo ritmo al que gira la tierra, y por lo tanto puede permanecer efectivamente estacionario en el cielo como terminal de comunicaciones que sirve a las áreas continentales. Dichos satélites se denominan “geoestacionarios” o “geosincrónicos”.
Si E b = 10 -20 Julios por bit es suficiente, entonces una señal HDTV R = 20 Mbps requiere:
\[\mathrm{P}_{\mathrm{r}}=\mathrm{E}_{\mathrm{b}} \mathrm{R}=10^{-20} \times\left(2 \times 10^{7}\right)=2 \times 10^{-13} \ [\mathrm{W}] \label{11.4.8}\]
La igualdad de las partes derechas de (\ ref {11.4.7}) y (\ ref {11.4.8}) revela que un vatio de potencia del transmisor P t en este satélite podría enviar una señal digital de HDTV a todos los hogares y negocios en el este de Estados Unidos Desde un margen de 20 dB 63 para atenuación de lluvia, receptores ruidosos, antenas domésticas más pequeñas o mal puntiagudas, etc. es deseable, los transmisores de 100 vatios podrían usarse en la práctica.
Se definen 63 decibelios (dB) para una relación R tal que dB = 10 log 10 R y R = 10 (dB) /10; así 20 dB → R = 100.
También podemos estimar el área física A p de la antena de apertura en el satélite. Si conocemos P t e I en la tierra, entonces podemos determinar la ganancia del satélite G usando I = GP t /4\(\pi\) r 2 (\ ref {11.4.2}), donde r 40,000 km en el norte de Estados Unidos; aquí tenemos I 3.3×10 -12 cuando P t = 1 vatio. La longitud de onda λ a 12 GHz es de 2.5 cm (λ = c/f). Pero A p 1.5A o, donde A o está relacionado con G por (\ ref {11.4.4}). Por lo tanto, obtenemos el resultado razonable de que una placa parabólica de 2.5 metros de diámetro en el satélite debería ser suficiente:
\[\mathrm{A_{p} \cong 1.5 A_{0}=\left(1.5 \lambda^{2} / 4 \pi\right) G=\left(1.5 \lambda^{2} / 4 \pi\right)\left(4 \pi r^{2} I / P_{t}\right) \cong 5 \ \left[m^{2}\right]} \label{11.4.9}\]
El mismo resultado podría haberse obtenido al determinar la extensión angular del área de cobertura estadounidense vista desde el satélite y luego, como se discute en la Sección 11.1.2, determinar qué diámetro de antena tendría un patrón de difracción con ese mismo ancho de haz.
Así podemos diseñar sistemas de comunicaciones digitales para una velocidad de datos R [b s -1] si conocemos el rango r, la longitud de onda λ y la sensibilidad del receptor (Julios requeridos por bit). Para los sistemas analógicos también necesitamos conocer la relación señal/ruido (SNR) deseada en el receptor y la potencia de ruido N. La Tabla 11.4.1 enumera las velocidades de datos típicas R para diversas aplicaciones, y la Tabla 11.4.2 enumera los valores SNR típicos requeridos para varios tipos de señal analógica.
Tabla\(\PageIndex{1}\): Tasas de datos digitales para aplicaciones típicas y técnicas de codificación fuente 64.
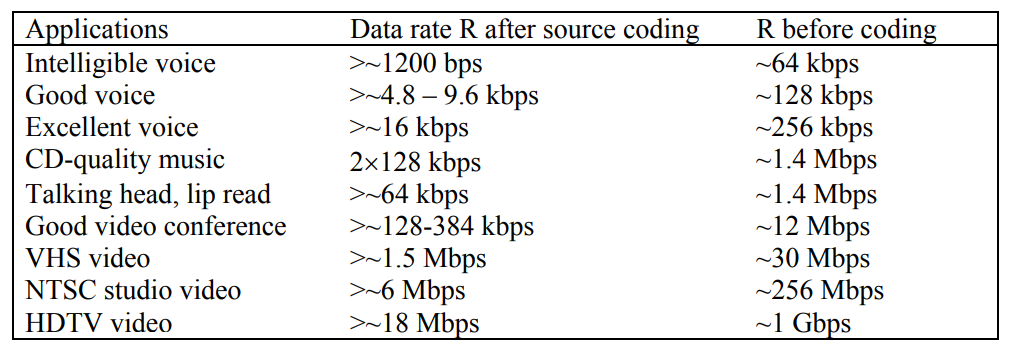
64 La codificación de origen reduce el número de bits a comunicar al eliminar redundancias e información que el usuario no necesita. La tabla enumera las tasas de datos típicas antes y después de la codificación.
Tabla\(\PageIndex{2}\): Relaciones señal-ruido 65 para aplicaciones inalámbricas típicas.
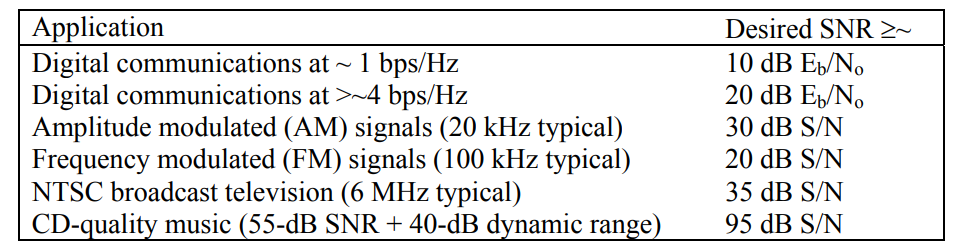
65 Para las señales digitales la relación señal-ruido adimensional (SNR) dada aquí es la energía por bit Eb dividida por la densidad de potencia de ruido N o [W Hz -1], donde N o = kT y T es la temperatura del ruido, digamos 100-10 4 K típicamente. Para las señales analógicas, S y N son las potencias totales de señal y ruido, respectivamente, donde N = kTb y B es ancho de banda de señal [Hz].
Ejemplo\(\PageIndex{A}\)
Una antena reflectora parabólica de 2 metros de diámetro transmite P t = 10 vatios a 3 GHz desde más allá del borde del sistema solar (R 10 10 km) a una antena similar en tierra de 50 m de diámetro a una velocidad de datos máxima N bits/seg. ¿Qué es N si el receptor requiere 10 -20 Julios bit -1?
Solución
Recordemos que el área efectiva en el eje A de una antena de apertura circular equivale a ~0.6 veces su área física (\(\pi\)r 2), y tiene ganancia\(\mathrm{G}=4 \pi \mathrm{A} / \lambda^{2}=(2 \pi \mathrm{r} / \lambda)^{2}\). La potencia recibida es\(\mathrm P_{\mathrm{rec}}=\mathrm{P}_{\mathrm{t}} \mathrm{G}_{\mathrm{t}} \mathrm{A}_{\mathrm{r}} / 4 \pi \mathrm{R}^{2} \) (\ ref {11.4.6}); por lo tanto:
\[\begin{aligned}\mathrm{R} \cong \mathrm{P}_{\mathrm{rec}} / \mathrm{E}_{\mathrm{b}} &=\left[\mathrm{P}_{\mathrm{t}}(0.6)^{2}\left(2 \pi \mathrm{r}_{\mathrm{t}} / \lambda\right)^{2} \pi \mathrm{r}_{\mathrm{r}}^{2}\right] /\left[4 \pi \mathrm{R}^{2} \mathrm{E}_{\mathrm{b}}\right] \\ &=\left[10 \times(0.6)^{2}(2 \pi \times 1 / 0.1)^{2} \pi 25^{2}\right] /\left[4 \pi 10^{26} \times 10^{-20}\right] \cong 2.2 \ \mathrm{bps} \end{aligned}\]
Radar y LIDAR
Los sistemas Radar (RadiO Direction and Range finding) y LIDAR (Light Direction and Range finding) transmiten señales hacia objetivos de interés y reciben ecos. Por lo general, determinan: 1) la distancia objetivo usando el retardo de propagación de ida y vuelta, 2) la dirección del objetivo usando la intensidad del eco en relación con la orientación de la antena, 3) la velocidad radial del objetivo usando el desplazamiento Doppler observado y 4) el tamaño del objetivo o las propiedades de dispersión usando la intensidad máxima del eco La Figura 11.4.2 ilustra la configuración de radar más común.
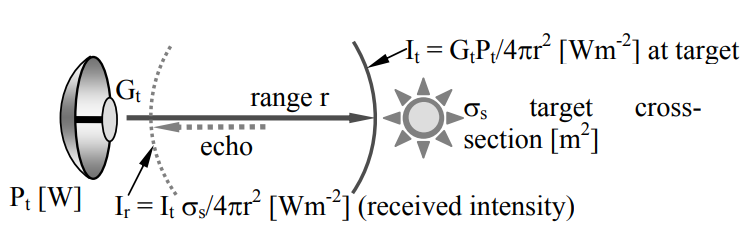
Para calcular la potencia recibida, primero calculamos la intensidad I t de radiación en el objetivo en el rango r para una potencia de transmisor y ganancia de antena de P t y G, respectivamente:
\[\mathrm{I}_{\mathrm{t}}=\mathrm{G} \frac{\mathrm{P}_{\mathrm{t}}}{4 \pi \mathrm{r}^{2}} \ \left[\mathrm{W} / \mathrm{m}^{2}\right] \qquad \qquad \qquad \text{(intensity at target) } \label{11.4.10}\]
El objetivo entonces dispersa esta radiación en algún patrón y absorbe el resto. Parte de esta radiación dispersa llega al receptor con intensidad I r, donde:
\[\mathrm{I}_{\mathrm{r}}=\mathrm{I}_{\mathrm{t}} \frac{\sigma_{\mathrm{s}}}{4 \pi \mathrm{r}^{2}} \ \left[\mathrm{W} / \mathrm{m}^{2}\right] \qquad \qquad \qquad \text{(intensity at radar) } \label{11.4.11}\]
donde\(\sigma_{\mathrm{s}} \) es la sección transversal de dispersión del objetivo y se define por (\ ref {11.4.11}). Es decir,\(\sigma_{\mathrm{s}} \) es la sección transversal de captura [m 2] en el objetivo que produciría I r si el objetivo dispersara la radiación incidente isotrópicamente. Por lo tanto, los objetivos que dispersan preferentemente la radiación hacia el transmisor pueden tener secciones transversales de dispersión sustancialmente mayores que sus secciones transversales físicas.
La potencia recibida P r es entonces simplemente I r A r [W], donde A r es el área efectiva de la antena receptora. Es decir:
\[\mathrm{P_{r}=I_{r} A_{r}=\frac{I_{t} \sigma_{s}}{4 \pi r^{2}} A_{r}=G \frac{P_{t} \sigma_{s}}{\left(4 \pi r^{2}\right)^{2}} A_{r}} \label{11.4.12}\]
\[\mathrm{P_{r}=P_{t} \frac{\sigma_{s}}{4 \pi}\left(\frac{G \lambda}{4 \pi r^{2}}\right)^{2} \ [W]} \qquad\qquad\qquad \text{(radar equation)} \label{11.4.13}\]
donde usamos\( \mathrm{A}_{\mathrm{r}}=\mathrm{G} \lambda^{2} / 4 \pi\), y donde (\ ref {11.4.13}) a menudo se llama la ecuación de radar. La dependencia de la potencia recibida en la cuarta potencia de rango y el cuadrado de ganancia de antena a menudo controlan el diseño del sistema de radar.
La atenuación atmosférica a menudo se incluye en la ecuación del radar por medio de un factor de atenuación de ida y vuelta\( \mathrm{e^{-2 \alpha r}}\), donde\(\alpha\) es el coeficiente de atenuación atmosférica promedio (m -1) y r es rango. La atenuación atmosférica se discute en la Sección 11.3.2 y por debajo de 200 GHz se debe principalmente al oxígeno, vapor de agua y lluvia; generalmente no es importante por debajo de ~3 GHz. La absorción de oxígeno ocurre principalmente en los 10 km más bajos de la atmósfera ~50-70 GHz y cerca de 118 GHz, la absorción de vapor de agua ocurre principalmente en los 3 km más bajos de la atmósfera por encima de ~10 GHz, y la absorción de lluvia ocurre hasta ~15 km en las celdas de lluvia más grandes por encima de ~3 GHz.
Los sistemas Lidar también obedecen a la ecuación del radar, pero la dispersión de aerosoles por nubes, neblina o humo se vuelve más preocupante. También los frentes de fase de los haces ópticos se alteran más fácilmente por las inhomogeneidades refractivas en la atmósfera que pueden modular los ecos recibidos en escalas de tiempo de milisegundos con desvanecimiento aleatorio de diez dB o más.
Un ejemplo sencillo ilustra el uso de la ecuación del radar (\ ref {11.4.13}). Supongamos que deseamos conocer el rango r en el que podemos detectar asteroides peligrosos que tienen diámetros superiores a los ~300m que se acercan a la tierra. Supongamos que el receptor tiene ruido aditivo caracterizado por la temperatura de ruido del sistema Ts, y que el ancho de banda del radar es de un Hertz porque la sinusoide recibida se promediará durante aproximadamente un segundo. Los ecos de radar detectables deben tener P r > kT s B [W], donde k es la constante de Boltzmann (k = 1.38×10 -23) y B es el ancho de banda del sistema (~1 Hz); esto implica P r 1.4×10 -23 T s watts. Podemos estimar\( \sigma_{\mathrm{s}}\) para un asteroide de 300 metros asumiendo que refleja aproximadamente así como la tierra, digamos quince por ciento, y que la dispersión es aproximadamente isotrópica; luego\(\sigma_{\mathrm{s}} \cong 10^{4} \) [m 2]. Si además asumimos que nuestro radar está utilizando componentes cercanos al estado de la técnica, entonces podríamos tener P t 1 Mw, Gt 10 8, λ = 0.1 m, y T s 10K. La ecuación del radar produce entonces:
\[\mathrm{r} \cong\left[\mathrm{P}_{\mathrm{t}} \sigma_{\mathrm{s}}\left(\mathrm{G}_{\mathrm{t}} \lambda\right)^{2} /(4 \pi)^{3} \mathrm{P}_{\mathrm{r}}\right]^{0.25} \cong 5 \times 10^{7} \ \mathrm{km} \label{11.4.14}\]
Este rango es de aproximadamente un tercio de la distancia al sol y proporcionaría una advertencia de aproximadamente 2-3 semanas.
Los sistemas ópticos con una gran área de apertura A podrían realizar esta tarea mejor porque su ganancia de antena\(\mathrm{G}=\mathrm{A} 4 \pi / \lambda^{2} \), y λ para LIDAR es típicamente 10 -5 la de un radar común. Para antenas de la misma apertura física y potencia de transmisor, el lidar de 1 micrón tiene una ventaja sobre el radar de 10 cm de ~10 en P r/P t.
El radar sufre debido a su dependencia de la cuarta potencia de rango para objetivos más pequeños que el ancho de haz de la antena. Si el radar puede colocar toda su energía transmitida en el objetivo, entonces solo sufre la pérdida de rango cuadrado de la trayectoria de retorno. La capacidad de los sistemas LIDAR para enfocar fuertemente su haz de transmisión totalmente en un objetivo pequeño a menudo permite su operación en el régimen altamente ventajoso r -2 en lugar de r -4.
Las ecuaciones (\ ref {11.4.13}) y (\ ref {11.4.14}) se pueden revisar fácilmente para el caso en que toda la energía del radar intercepte al objetivo. La ecuación del radar se convierte entonces en:
\[\mathrm{P_{r}=P_{t} R G(\lambda / 4 \pi r)^{2} \ [W]} \label{11.4.15}\]
donde la retrorreflectividad objetivo R se define por (\ ref {11.4.15}) y es la relación adimensional de la intensidad de radiación retrodispersada en el radar a lo que sería retrodispersada si la radiación fuera dispersada isotrópicamente por el objetivo. Para los mismos supuestos utilizados anteriormente, los asteroides podrían detectarse en un rango r de ~3×10 12 km si R 0.2, un valor típico para roca helada. La distancia de detección implícita es ahora dramáticamente más lejos que antes, y llega fuera de nuestro sistema solar. Sin embargo, el requisito de que todo el haz de radar golpee el asteroide sería esencialmente imposible incluso para los mejores sistemas ópticos, por lo que este enfoque para aumentar el rango de detección generalmente no es práctico para sondear pequeños objetos distantes.
Los sistemas de radar suelen utilizar matrices en fase de elementos de antena, como se discute en la Sección 10.4, para enfocar su energía en puntos pequeños o para mirar en más de una dirección a la vez. De hecho, un solo sistema de radar móvil, por ejemplo en un avión, puede recibir coherentemente pulsos de radar reflejados secuenciales y volver a ensamblar digitalmente la señal durante algún período de tiempo para sintetizar el equivalente de una antena de matriz en fase que es mucho más grande que la antena física. Es decir, una pequeña antena receptora puede moverse sobre un área A mucho mayor, y al combinar sus señales recibidas desde diferentes ubicaciones de una manera coherente de fase, puede proporcionar la resolución angular superior asociada con el área A. Esto se llama radar de apertura sintética (SAR) y no se discute más aquí.
Ejemplo\(\PageIndex{B}\)
Un radar con ancho de banda de 1 GHz y ganancia de 40 dB a 10 GHz ve el sol, el cual tiene un diámetro angular de 0.5 grados y una temperatura de brillo T B = 10,000K. Aproximadamente, ¿cuál es la temperatura de la antena T A y la potencia recibida por el radar del sol si ignoramos alguna reflexión del radar?
Solución
La potencia recibida es la intensidad en el puerto de antena I [W/Hz] multiplicado por el ancho de banda B [Hz], donde I kT A (11.3.1), y T A es la temperatura de antena dada por la integral en (11.3.4). Esta integral es trivial si G (θ,\(\phi\)) es casi constante sobre el ángulo sólido\(\Omega_{\mathrm{S}}\) del sol; entonces\( \mathrm{T}_{\mathrm{A}} \cong \mathrm{G}_{\mathrm{o}} \mathrm{T}_{\mathrm{B}} \Omega_{\mathrm{S}} / 4 \pi\). La ganancia constante a través del sol requiere el ancho del haz de la antena θ B >> 0.5 grados. Podemos estimar aproximadamente θ B aproximando la ganancia de la antena como una constante G o sobre un ángulo sólido\(\Omega_{\mathrm{B}}\), y cero en otra parte; luego (10.3.3) rendimientos\(\int_{4 \pi} \mathrm{G}(\theta, \phi) \mathrm{d} \Omega=4 \pi=\mathrm{G}_{0} \Omega_{\mathrm{B}}=10^{4} \Omega_{\mathrm{B}} \). Por lo tanto\( \Omega_{\mathrm{B}} \cong 4 \pi / 10^{4} \cong \pi\left(\theta_{\mathrm{B}} / 2\right)^{2}\), y θ B 0.04 radianes 2.3 grados, el cual es marginalmente mayor que el diámetro solar requerido para el uso de la aproximación θ B >> 0.5 en una estimación aproximada. De ello se deduce que\(\mathrm{T}_{\mathrm{A}} \cong \mathrm{G}_{\mathrm{o}} \mathrm{T}_{\mathrm{B}} \Omega_{\mathrm{S}} / 4 \pi=10^{4} \times 10^{4} \times \pi\left(\theta_{\mathrm{S}} / 2\right)^{2} / 4 \pi \cong 480 \) grados Kelvin, algo mayores que la temperatura de ruido de buenos receptores. El poder recibido es\(\mathrm{kT}_{\mathrm{A}} \mathrm{B} \cong 1.38 \times 10^{-23} \times 480 \times 10^{9} \cong 6.6 \times 10^{-12} \ \mathrm{watts} \). Esta es una ligera sobreestimación porque la ganancia es en realidad ligeramente menor que G o en la extremidad solar.
Ejemplo\(\PageIndex{C}\)
¿Cuál es la sección transversal\(\sigma_{\mathrm{s}}\) de dispersión de una pequeña placa plana distante del área F orientada para reflejar la radiación incidente directamente hacia el transmisor?
Solución
La ecuación del radar (\ ref {11.4.12}) relaciona la potencia transmitida Pt con la recibida, P r, en términos de\(\sigma_{\mathrm{s}}\). Una relación similar se puede derivar tratando la potencia reflejada desde la placa plana como si viniera de una abertura uniformemente iluminada con intensidad P t G t /4\(\pi\) r 2 [W m -2]. La potencia P r recibida por el radar es entonces la potencia radiada por la abertura de placa plana, FP t G t /4\(\pi\) r 2 [W], insertada como P t en la expresión de enlace (\ ref {11.4.6}): P r = (FP t G t /4 \(\pi\)r 2) G f A r /4\(\pi\) r 2. La ganancia de la abertura de la placa plana es\( \mathrm{G}_{\mathrm{f}}=\mathrm{F} 4 \pi / \lambda^{2}\), y\( \mathrm{A}_{\mathrm{r}}=\mathrm{G} \lambda^{2} / 4 \pi\), así G f A r = GF. Equiparar P r en esta expresión a la de la ecuación del radar produce:\(\mathrm{P}_{\mathrm{t}} \sigma_{\mathrm{s}}\left(\mathrm{G} \lambda / 4 \pi \mathrm{r}^{2}\right)^{2} / 4 \pi=\left(\mathrm{FP}_{\mathrm{t}} \mathrm{G}_{\mathrm{t}} / 4 \pi \mathrm{r}^{2}\right) \mathrm{GF} / 4 \pi \mathrm{r}^{2} \), entonces\( \sigma_{\mathrm{s}}=\mathrm{F}\left(4 \pi \mathrm{F} / \lambda^{2}\right)\). Nota\(\sigma_{\mathrm{s}}\) >> F si\( \mathrm{F}>>\lambda^{2} / 4 \pi\). Los reflectores de esquina (tres placas planas en ángulo recto que se cruzan para formar una esquina de un cubo) reflejan ondas planas directamente hacia su fuente si las ondas impactan la porción cóncava del reflector desde cualquier ángulo. Por lo tanto, el reflector de esquina se convierte en un objetivo de radar muy eficiente en el área si su área total proyectada F es mayor que\( \lambda^{2}\).