
9.4: Dinámica
- Page ID
- 128494

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)objetivos de aprendizaje
- Explicar la relación entre la fuerza, la masa, el radio y la aceleración angular
Si alguna vez has girado una rueda de bicicleta o empujado un tiovivo, has experimentado la fuerza necesaria para cambiar la velocidad angular. Nuestra intuición es confiable para predecir muchos de los factores que están involucrados. Por ejemplo, sabemos que una puerta se abre lentamente si nos acercamos demasiado a sus bisagras. Además, sabemos que cuanto más masiva es la puerta, más lentamente se abre. El primer ejemplo implica que cuanto más lejos se aplique la fuerza del pivote, mayor será la aceleración angular; otra implicación es que la aceleración angular es inversamente proporcional a la masa. Estas relaciones deberían parecer muy similares a las relaciones familiares entre fuerza, masa y aceleración encarnadas en la segunda ley del movimiento de Newton. Existen, de hecho, análogos rotacionales precisos tanto de fuerza como de masa.
La inercia rotacional, como se ilustra en, es la resistencia de los objetos a los cambios en su rotación. En otras palabras, un objeto giratorio permanecerá girando y un objeto no giratorio permanecerá sin rotar a menos que actúe sobre él por un par. Esto debería recordarte la Primera Ley de Newton.
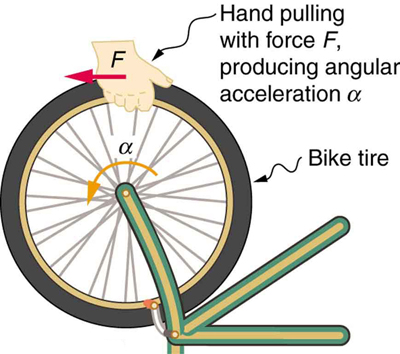
Inercia Rotacional: Se requiere fuerza para hacer girar la rueda de la bicicleta. Cuanto mayor sea la fuerza, mayor será la aceleración angular producida. Cuanto más masiva es la rueda, menor es la aceleración angular. Si empujas un radio más cerca del eje, la aceleración angular será menor.
Para desarrollar la relación precisa entre fuerza, masa, radio y aceleración angular, considere lo que sucede si ejercemos una fuerza F sobre una masa puntual m que está a una distancia r de un punto de pivote. Debido a que la fuerza es perpendicular a r,\(\mathrm{a=\frac{F}{m}}\) se obtiene una aceleración en la dirección de F. Podemos reorganizar esta ecuación de tal manera que f=mA y luego buscar formas de relacionar esta expresión con expresiones para cantidades rotacionales. Observamos que a=rα, y sustituimos esta expresión por f=mA, produciendo:
\[\mathrm{F=mrα.}\]
Recordemos que el par es la efectividad de giro de una fuerza. En este caso, debido a que F es perpendicular a r, el par es simplemente\(\mathrm{τ=Fr}\). Entonces, si multiplicamos ambos lados de la ecuación anterior por r, obtenemos torque en el lado izquierdo. Es decir,\[\mathrm{rF = mr^2α}\], o
\[\mathrm{τ = mr^2α.}\]
Esta ecuación es el análogo rotacional de la segunda ley de Newton (\(\mathrm{F=ma}\)), donde el par es análogo a la fuerza, la aceleración angular es análoga a la aceleración de traslación, y mr 2 es análogo a la masa (o inercia). La cantidad mr 2 se denomina inercia rotacional o momento de inercia de una masa puntual m a distancia r del centro de rotación.
Las diferentes formas de los objetos tienen diferentes inercias rotacionales que dependen de la distribución de su masa.
Puntos Clave
- Cuanto más lejos se aplique la fuerza del pivote, mayor será la aceleración angular.
- La aceleración angular es inversamente proporcional a la masa.
- La ecuación\(\mathrm{τ = mr^2α.}\) es el análogo rotacional de la segunda ley de Newton (\(\mathrm{F=ma}\)), donde el par es análogo a la fuerza, la aceleración angular es análoga a la aceleración de traslación, y\(\mathrm{mr^2}\) es análoga a la masa (o inercia).
Términos Clave
- inercia rotacional: La tendencia de un objeto giratorio a permanecer girando a menos que se le aplique un par.
- par: Un efecto de rotación o torsión de una fuerza; (unidad SI newton-metro o Nm; unidad imperial pie-libra o ft-lb)
LICENCIAS Y ATRIBUCIONES
CONTENIDO CON LICENCIA CC, COMPARTIDO PREVIAMENTE
- Curación y Revisión. Proporcionado por: Boundless.com. Licencia: CC BY-SA: Atribución-CompartirIgual
CC CONTENIDO LICENCIADO, ATRIBUCIÓN ESPECÍFICA
- Colegio OpenStax, Colegio de Física. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42179/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Colegio OpenStax, Colegio de Física. 17 de septiembre de 2013. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42179/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución
- Sin límites. Proporcionado por: Boundless Learning. Ubicado en: www.boundless.com//fisics/definición/inercia rotacional. Licencia: CC BY-SA: Atribución-CompartirIgual
- par. Proporcionado por: Wikcionario. Ubicado en: es.wiktionary.org/wiki/torque. Licencia: CC BY-SA: Atribución-CompartirIgual
- Colegio OpenStax, Colegio de Física. 9 de noviembre de 2012. Proporcionado por: OpenStax CNX. Ubicado en: http://cnx.org/content/m42179/latest/?collection=col11406/1.7. Licencia: CC BY: Atribución