
22A: Centro de Masa, Momento de Inercia



- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Un error que surge en el cálculo de los momentos de inercia, involucra el Teorema del Eje Paralelo. El error es intercambiar el momento de inercia del eje a través del centro de masa, con el paralelo a ese, al aplicar el Teorema del Eje Paralelo. Reconocer que el subíndice “CM” en el teorema del eje paralelo significa “centro de masa” ayudará a evitar este error. También, una comprobación de la respuesta, para asegurarse de que el valor del momento de inercia con respecto al eje a través del centro de masa es menor que el otro momento de inercia, atrapará el error.
Centro de Masa
Considera dos partículas, que tienen una y la misma masa m, cada una de las cuales se encuentra en una posición diferente en el eje x de un sistema de coordenadas cartesianas.
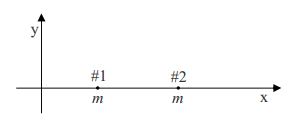
El sentido común te dice que la posición promedio del material que compone las dos partículas está a medio camino entre las dos partículas. El sentido común es correcto. Damos el nombre de “centro de masa” a la posición promedio del material que constituye una distribución, y el centro de masa de un par de partículas de la misma masa está de hecho a medio camino entre las dos partículas.
¿Qué tal si una de las partículas es más masiva que la otra? Uno esperaría que el centro de masa estuviera más cerca de la partícula más masiva, y nuevamente, uno tendría razón. Para determinar la posición del centro de masa de la distribución de la materia en tal caso, calculamos una suma ponderada de las posiciones de las partículas en la distribución, donde el factor de ponderación para una partícula dada es esa fracción, de la masa total, que es la masa propia de la partícula. Así, para dos partículas en elx eje, una de masam1, enx1, y la otra de masam2, enx2,
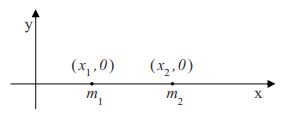
la posiciónˉx del centro de masa viene dada por
ˉx=m1m1+m2x1+m2m1+m2x2
Obsérvese que cada factor de ponderación es una fracción propia y que la suma de los factores de ponderación es siempre 1. También tenga en cuenta que si, por ejemplo,m1 es mayor quem2, entonces la posiciónx1 de la partícula 1 contará más en la suma, asegurando así que el centro de masa se encuentre más cerca de la partícula más masiva (como sabemos que debe ser). Obsérvese además que sim1=m2, cada factor de ponderación es12, como es evidente cuando sustituimos m por ambosm1 ym2 en la Ecuación???:
ˉx=mm+mx1+mm+mx2
ˉx=12x1+12x2
ˉx=x1+x22
Se encuentra que el centro de masa está a medio camino entre las dos partículas, justo donde el sentido común nos dice que tiene que estar.
El centro de masa de una varilla delgada
Muy a menudo, cuando se requiere el hallazgo de la posición del centro de masa de una distribución de partículas, la distribución de partículas es el conjunto de partículas que conforman un cuerpo rígido. El cuerpo rígido más fácil para el que calcular el centro de masa es la varilla delgada porque se extiende en una sola dimensión. (Aquí, discutimos una varilla delgada ideal. Una varilla delgada física debe tener un diámetro distinto de cero. La varilla delgada ideal, sin embargo, es una buena aproximación a la varilla delgada física siempre que el diámetro de la varilla sea pequeño en comparación con su longitud).
En el caso más simple, el cálculo de la posición del centro de masa es trivial. El caso más simple involucra una varilla delgada uniforme. Una varilla delgada uniforme es aquella para la cual la densidad de masa linealμ, la masa por longitud de la varilla, tiene uno y el mismo valor en todos los puntos de la varilla. El centro de masa de una varilla uniforme está en el centro de la varilla. Entonces, por ejemplo, el centro de masa de una varilla uniforme que se extiende a lo largo del eje x dex=0 ax=L está en (L/2, 0).
La densidad de masa linealμ, típicamente llamada densidad lineal cuando el contexto es claro, es una medida de lo estrechamente empaquetadas que están las partículas elementales que componen la varilla. Donde la densidad lineal es alta, las partículas están muy juntas.
Para imaginar lo que se entiende por una varilla no uniforme, una varilla cuya densidad lineal es función de la posición, imagine una varilla delgada hecha de una aleación que consiste en plomo y aluminio. Además imagine que el porcentaje de plomo en la varilla varía suavemente de 0% en un extremo de la varilla a 100% en el otro. La densidad lineal de dicha varilla sería una función de la posición a lo largo de la longitud de la varilla. Un segmento de un milímetro de la varilla en una posición tendría una masa diferente a la de un segmento de un milímetro de la varilla en una posición diferente.
A las personas con cierta exposición al cálculo les resulta más fácil entender qué es la densidad lineal que los individuos privados de cálculo porque la densidad lineal es solo la relación entre la cantidad de masa en un segmento de varilla y la longitud del segmento, en el límite ya que la longitud del segmento va a cero. Considera una varilla que se extiende de0 aL lo largo delx eje. Ahora supongamos quems(x) es la masa de ese segmento de la varilla que se extiende desde0x dondex≥0 perox<L. Entonces, la densidad lineal de la varilla en cualquier punto x a lo largo de la varilla, solo sedmsdx evalúa al valor dex en cuestión.
Ahora que se tiene una buena idea de lo que queremos decir con densidad de masa lineal, vamos a ilustrar cómo se determina la posición del centro de masa de una varilla delgada no uniforme por medio de un ejemplo.
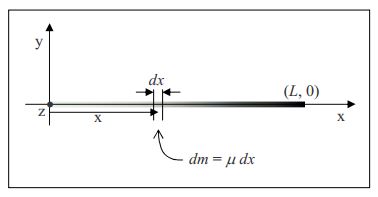
Encuentra la posición del centro de masa de una varilla delgada que se extiende desde0 to .890m along the x axis of a Cartesian coordinate system and has a linear density given by μ(x)=0.650kgm3x2. Solution
In order to be able to determine the position of the center of mass of a rod with a given length and a given linear density as a function of position, you first need to be able to find the mass of such a rod. To do that, one might be tempted to use a method that works only for the special case of a uniform rod, namely, to try using m=μL with L being the length of the rod. The problem with this is, that μ varies along the entire length of the rod. What value would one use for μ? One might be tempted to evaluate the given μ at x=L and use that, but that would be acting as if the linear density were constant at μ=μ(L). It is not. In fact, in the case at hand, μ(L) is the maximum linear density of the rod, it only has that value at one point on the rod.
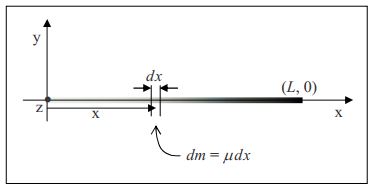
What we can do is to say that the infinitesimal amount of mass dm in a segment dx of the rod is μdx. Here we are saying that at some position x on the rod, the amount of mass in the infinitesimal length dx of the rod is the value of μ at that x value, times the infinitesimal length dx. Here we don’t have to worry about the fact that μ changes with position since the segment dx is infinitesimally long, meaning, essentially, that it has zero length, so the whole segment is essentially at one position x and hence the value of μ at that x is good for the whole segment dx.
\boldsymbol{dm=\mu (x) dx \label{22-2}}
Now this is true for any value of x, but it just covers an infinitesimal segment of the rod at x. To get the mass of the whole rod, we need to add up all such contributions to the mass. Of course, since each dm corresponds to an infinitesimal length of the rod, we will have an infinite number of terms in the sum of all the dm’s. An infinite sum of infinitesimal terms, is an integral.
\boldsymbol{\int dm=\int_{0}{L} \mu (x) dx \label{22-3}}
where the values of x have to run from 0 to L to cover the length of the rod, hence the limits on the right. Now the mathematicians have provided us with a rich set of algorithms for evaluating integrals, and indeed we will have to reach into that toolbox to evaluate the integral on the right, but to evaluate the integral on the left, we cannot, should not, and will not turn to such an algorithm. Instead, we use common sense and our conceptual understanding of what the integral on the left means. In the context of the problem at hand, ∫dm means “the sum of all the infinitesimal bits of mass making up the rod.” Now, if you add up all the infinitesimal bits of mass making up the rod, you get the mass of the rod. So ∫dm is just the mass of the rod, which we will call m. Equation 22A.2 then becomes
\boldsymbol{m=\int_{0}{L} \mu(x) dx \label{22-4}}
Replacing μ(x) with the given expression for the linear density μ=0.650kgm3x2 which I choose to write as μ=bx2 with b being defined by b=0.650kgm3 we obtain
m=∫0Lbx2dx
Factoring out the constant yields
m=b∫0Lx2dx
When integrating the variable of integration raised to a power all we have to do is increase the power by one and divide by the new power. This gives
m=bx33|L0
Evaluating this at the lower and upper limits yields
m=b(L33−033)
m=bL33
The value of L is given as 0.890m and we defined b to be the constant 0.650kgm3 in the given expression for μ, μ=0.650kgm3x2, so
m=0.650kgm3(0.890m)33
m=0.1527kg
That’s a value that will come in handy when we calculate the position of the center of mass. Now, when we calculated the center of mass of a set of discrete particles (where a discrete particle is one that is by itself, as opposed, for instance, to being part of a rigid body) we just carried out a weighted sum in which each term was the position of a particle times its weighting factor and the weighting factor was that fraction, of the total mass, represented by the mass of the particle. We carry out a similar procedure for a continuous distribution of mass such as that which makes up the rod in question. Let’s start by writing one single term of the sum. We’ll consider an infinitesimal length dx of the rod at a position x along the length of the rod. The position, as just stated, is x, and the weighting factor is that fraction of the total mass m of the rod that the mass dm of the infinitesimal length dx represents. That means the weighting factor is dmm, so, a term in our weighted sum of positions looks like:
dmmx
Now, dm can be expressed as μdx so our expression for the term in the weighted sum can be written as
μdxmx
That’s one term in the weighted sum of positions, the sum that yields the position of the center of mass. The thing is, because the value of x is unspecified, that one term is good for any infinitesimal segment of the bar. Every term in the sum looks just like that one. So we have an expression for every term in the sum. Of course, because the expression is for an infinitesimal length dx of the rod, there will be an infinite number of terms in the sum. So, again we have an infinite sum of infinitesimal terms. That is, again we have an integral. Our expression for the position of the center of mass is:
ˉx=∫0Lμdxmx
Substituting the given expression μ(x)=0.650kgm3x2 for μ, which we again write as μ=bx2 with b being defined by b=0.650kgm3, yields
ˉx=∫0Lbx2dxmx
Rearranging and factoring the constants out gives
ˉx=bm∫0Lx3dx
Next we carry out the integration
ˉx=bmx44|L0
ˉx=bm(L44−044)
ˉx=bL44m
Now we substitute values with units; the mass m of the rod that we found earlier, the constant b that we defined to simplify the appearance of the linear density function, and the given length L of the rod:
ˉx=(0.650kgm3)(0.890m)44(0.1527kg)
ˉx=0.668m
This is our final answer for the position of the center of mass. Note that it is closer to the denser end of the rod, as we would expect. The reader may also be interested to note that had we substituted the expression m=bL33 that we derived for the mass, rather than the value we obtained when we evaluated that expression, our expression for ˉx would have simplified to 34L which evaluates to ˉx=0.668m, the same result as the one above.
Momento de inercia, también conocido como inercia rotacional
Ya se sabe que el momento de inercia de un objeto rígido, con respecto a un eje de rotación especificado, depende de la masa de ese objeto, y de cómo se distribuye esa masa en relación con el eje de rotación. De hecho, sabes que si la masa se empaqueta cerca del eje de rotación, el objeto tendrá un momento de inercia menor que si la misma masa estuviera más extendida en relación con el eje de rotación. Cuantifiquemos estas ideas. (Cuantificar, en este contexto, significa poner en forma de ecuación.)
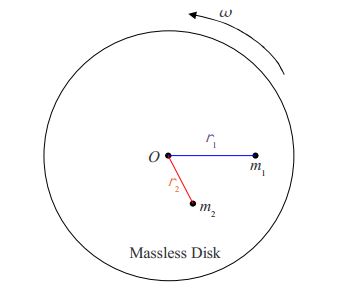
Comenzamos construyendo, en nuestra mente, un objeto idealizado para el cual la masa se concentra en una sola ubicación que no está en el eje de rotación: Imagínese un disco sin masa que gira con velocidad angular w alrededor de un eje a través del centro del disco y perpendicular a sus caras. Que haya una partícula de masa m incrustada en el disco a unar distancia del eje de rotación. Así es como se ve desde un punto de vista sobre el eje de rotación, a cierta distancia del disco:
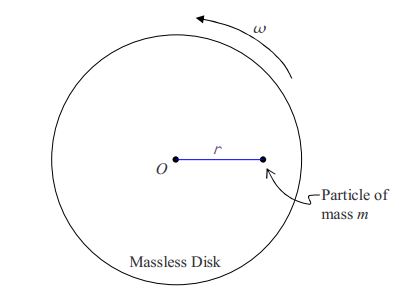
donde el eje de rotación está marcado con unO. Debido a que el disco es sin masa, llamamos al momento de inercia de la construcción, el momento de inercia de una partícula, con respecto a la rotación alrededor de un eje desde el que la partícula está a una distanciar.
Sabiendo que la velocidad de la partícula se puede expresar yav=rω que puede mostrarse cómoI debe definirse para que la expresión de energía cinéticaK=12Iω2 para el objeto, visto como un cuerpo rígido giratorio, sea la misma que la expresión de energía cinéticaK=12mv2 para la partícula moviéndose a través del espacio en un círculo. Cualquiera de los dos puntos de vista es válido por lo que ambos puntos de vista deben producir la misma energía cinética. Por favor, siga adelante y derive lo queI debe ser y luego regrese y lea la derivación a continuación.
Aquí está la derivación:
Dado esoK=12mv2, reemplazamosv porrω.
Esto daK=12m(rω)2
que se puede escribir como
K=12(mr2)ω2
Para que esto sea equivalente a
K=12Iω2
debemos tener
I=mr2
Este es nuestro resultado para el momento de inercia de una partícula de masam, con respecto a un eje de rotación desde el que la partícula está a una distanciar.
Ahora supongamos que tenemos dos partículas incrustadas en nuestro disco sin masa, una de masam1 a unar1 distancia del eje de rotación y otra de masam2 a unar2 distancia del eje de rotación.
El momento de inercia del primero por sí mismo sería
I1=m1r21
y el momento de inercia de la segunda partícula por sí mismo sería
I2=m2r22
El momento total de inercia de las dos partículas incrustadas en el disco sin masa es simplemente la suma de los dos momentos individuales de inercia.
I=I1+I2
I=m1r21+m2r22
Este concepto puede extenderse para incluir cualquier número de partículas. Para cada partícula adicional, uno simplemente incluye otromir2i término en la suma dondemi está la masa de la partícula adicional yri es la distancia que la partícula adicional está del eje de rotación. En el caso de un objeto rígido, subdividimos el objeto en un conjunto infinito de elementos de masa infinitesimalesdm. Cada elemento de masa aporta una cantidad de momento de inercia
\boldsymbol{dI=r^2dm \label{22-6}}
al momento de inercia del objeto, donder está la distancia que el elemento de masa particular se encuentra desde el eje de rotación.
Encuentra el momento de inercia de la varilla en Ejemplo??? with respect to rotation about the z axis. Solution
In Example ???, the linear density of the rod was given as μ=0.650kgm3x2. To reduce the number of times we have to write the value in that expression, we will write it as μ=bx2 with b being defined as b=0.650kgm3.
The total moment of inertia of the rod is the infinite sum of the infinitesimal contributions
\boldsymbol{dI=r^2 dm \label{22-6}}
from each and every mass element dm making up the rod.
In the diagram, we have indicated an infinitesimal element dx of the rod at an arbitrary position on the rod. The z axis, the axis of rotation, looks like a dot in the diagram and the distance r in dI=r2dm, the distance that the bit of mass under consideration is from the axis of rotation, is simply the abscissa x of the position of the mass element. Hence, equation 22A.21 for the case at hand can be written as
dI=x2dm
which we copy here
dI=x2dm
By definition of the linear mass density μ, the infinitesimal mass dm can be expressed as dm=μdx. Substituting this into our expression for dI yields
dI=x2μdx
Now μ was given as bx2 (with b actually being the symbol that I chose to use to represent the given constant 0.650kgm3). Substituting bx2 in for μ in our expression for dI yields
dI=x2(bx2)dx
dI=bx4dx
This expression for the contribution of an element dx of the rod to the total moment of inertia of the rod is good for every element dx of the rod. The infinite sum of all such infinitesimal contributions is thus the integral
∫dI=∫0Lbx4dx
Again, as with our last integration, on the left, we have not bothered with limits of integration— the infinite sum of all the infinitesimal contributions to the moment of inertia is simply the total moment of inertia.
I=∫0Lbx4dx
On the right we use the limits of integration 0 to L to include every element of the rod which extends from x=0 to x=L, with L given as 0.890m. Factoring out the constant b gives us
I=b∫0Lx4dx
Now we carry out the integration:
I=bx55|L0
I=b(L55−055)
I=bL55
Substituting the given values of b and L yields:
I=0.650kgm3(0.890m)55
I=0.0726kg⋅m2
Teorema del Eje Paralelo
Nosotros declaramos, sin pruebas, el teorema del eje paralelo:
I=Icm+md2
en el que:
- Ies el momento de inercia de un objeto con respecto a un eje desde el cual el centro de masa del objeto está a una distanciad.
- Icmes el momento de inercia del objeto con respecto a un eje que es paralelo al primer eje y pasa por el centro de masa.
- mes la masa del objeto
- des la distancia entre los dos ejes.
El teorema del eje paralelo relaciona el momentoICM de inercia de un objeto, con respecto a un eje a través del centro de masa del objeto, con el momento de inercia I del mismo objeto, con respecto a un eje que es paralelo al eje a través del centro de masa y se encuentra a una distancia d del eje a través del centro de masa.
Una afirmación conceptual hecha por el teorema del eje paralelo es aquella a la que probablemente podrías haber llegado por medio del sentido común, es decir, que el momento de inercia de un objeto con respecto a un eje a través del centro de masa es menor que el momento de inercia alrededor de cualquier eje paralelo a ese. Como saben, cuanto más cerca se “empaqueta” la masa del eje de rotación, menor es el momento de inercia; y; para un objeto dado, por definición del centro de masa, la masa se empaqueta más estrechamente al eje de rotación cuando el eje de rotación pasa por el centro de masa.
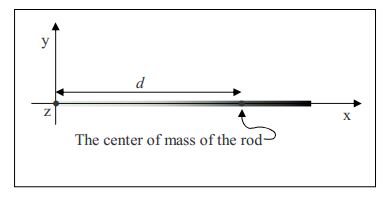
Encuentra el momento de inercia de la varilla a partir de ejemplos??? and 22A.1, with respect to an axis that is perpendicular to the rod and passes through the center of mass of the rod. Solution
Recall that the rod in question extends along the x axis from x=0 to x=L with L=0.890m and that the rod has a linear density given by μ=bL2 with b=0.650kgm3x2.
The axis in question can be chosen to be one that is parallel to the z axis, the axis about which, in solving example 22A.1, we found the moment of inertia to be I=0.0726kg⋅m2. In solving example ??? we found the mass of the rod to be m=0.1527kg and the center of mass of the rod to be at a distance d=0.668m away from the z axis. Here we present the solution to the problem:
I=Icm+md2
Icm=I−md2
Icm=0.0726kg⋅m2−0.1527kg(0.668m)2
Icm=0.0047kg⋅m2