
3.5: Paisajes Energéticos
- Page ID
- 129693
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En el apartado anterior probamos que se conserva la energía total. En la sección anterior a eso, nos fijamos en las energías potenciales. Por lo general, la energía potencial es una función de tu posición en el espacio. Cuando lo trazamos en función de las coordenadas espaciales, obtenemos un paisaje energético, midiendo una cantidad de energía en el eje vertical. Por supuesto que también podemos trazar la energía total del sistema -y como esa se conserva, es la misma en todas partes, y así se convierte en una línea horizontal o plano. Debido a que la energía cinética no puede ser negativa, no se permite ningún punto donde la energía potencial sea mayor que la energía total: el sistema no puede llegar a este punto. Cuando la energía potencial es igual a la energía total, la energía cinética (y por lo tanto la velocidad) tiene que ser cero. Siempre que la energía potencial es menor que la energía total, hay una energía cinética positiva y por lo tanto una velocidad positiva.
Probablemente el paisaje energético más simple es el del oscilador armónico (masa en un resorte), es una simple parábola. El punto en el que la línea horizontal que representa la energía total cruza la parábola corresponde a los extremos de la oscilación: estos son sus puntos de inflexión. El fondo de la parábola es su punto medio, e inmediatamente se puede ver que ahí es donde la energía cinética (y por lo tanto la velocidad) será más alta.
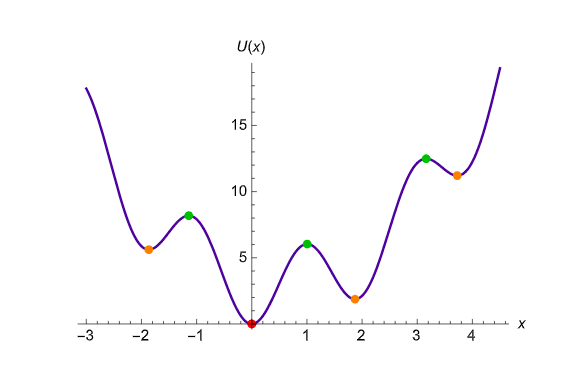
Por supuesto que puedes tener paisajes energéticos más complejos que eso. En particular, se puede tener un paisaje con múltiples extremos, ver por ejemplo Figura\(\PageIndex{1}\) Una partícula sobre la que está siendo actuada por fuerzas descritas por esta energía potencial, sigue una trayectoria en este paisaje, que puede visualizarse como una bola rodando sobre los cerros y valles del paisaje. Piense en el ejemplo del oscilador armónico. Si soltamos una bola en un jarrón parabólico en algún punto de la pendiente, la bola rodará hacia abajo y recogerá velocidad, luego enrollará la pendiente opuesta y perderá velocidad, hasta que alcance la misma altura donde su velocidad volverá a ser cero. Lo mismo ocurre en paisajes más complicados. Particularmente interesantes son los máximos locales. Si pones una pelota exactamente encima de una de ellas, se quedará ahí, es un punto fijo, pero inestable, ya que cualquier perturbación arbitrariamente pequeña la empujará hacia abajo. Si sueltas una pelota a un nivel por encima de un máximo local, puede saltarla al siguiente mínimo, pero si tu posición inicial (tu energía inicial) era demasiado baja, tu pelota puede quedar atascada oscilando alrededor de un mínimo local, un punto metaestable.
Los paisajes energéticos son incluso útiles cuando la energía total no se conserva, por ejemplo por términos de fricción. La fricción hace que la energía se disipe del sistema, lo que equivale a que tu bola se mueva en el paisaje con fricción. Por baja fricción, tu bola oscilará, pero cada vez será menos alta, hasta que llegue a descansar al mínimo. Para una alta fricción, ni siquiera oscilará, sino que solo llegará al mínimo, exactamente lo que hace un sistema sobreamortiguado en la vida real.
Ejemplo\(\PageIndex{1}\): Worked example: the Lennard-Jones Potential
La energía potencial de Lennard-Jones es un modelo de uso común para describir las interacciones entre átomos no cargados y moléculas. Esta energía potencial se puede escribir de dos maneras equivalentes:
\[U_{\mathrm{LJ}}(r)=\frac{A}{r^{12}}-\frac{B}{r^{6}}=4 \varepsilon\left[\left(\frac{\sigma}{r}\right)^{12}-\left(\frac{\sigma}{r}\right)^{6}\right] \nonumber \]
donde\(r\) es la distancia entre los átomos o moléculas, y A, B\(\varepsilon\), y\(\sigma\) son constantes positivas.
- Encuentra las dimensiones de A, B,\(\varepsilon\), y\(\sigma\).
- Expreso\(\varepsilon\) y\(\sigma\) en A y B.
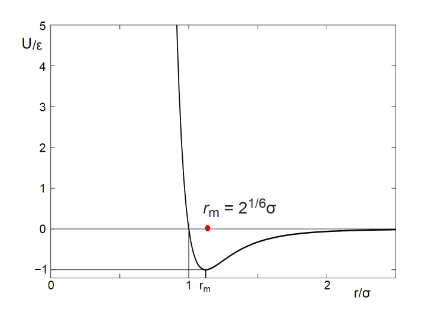
- Esbozar el potencial (en su segunda forma) en función de\(\frac{r}{\sigma}\), y utilizar este boceto para dar una interpretación física de\(\varepsilon\) y\(\sigma\).
- ¿El potencial de Lennard-Jones lleva a fuerzas atractivas o repulsivas a distancias cortas? Y ¿qué pasa con las largas distancias?
- Encontrar todos los puntos de equilibrio de esta energía potencial, y determinar su estabilidad.
Solución
- \[\begin{array}{l}{[U]=\text { Energy } \Longrightarrow[U]=M \times \frac{L}{T^{2}} \times L=\frac{M L^{2}}{T^{2}}} \\ {[A]=\text { Energy } \times \text { Length }^{12} \Longrightarrow[A]=\frac{M L^{2}}{T^{2}}} \\ {[B]=\text { Energy } \times \text { Length }^{6} \Longrightarrow[A]=\frac{M L^{8}}{T^{2}}}\end{array}\nonumber \]Debido a que los poderes de\(\left(\left(\frac{\sigma}{r}\right)^{12}\right) \text { and }\left(\left(\frac{\sigma}{r}\right)^{6}\right)\) los términos son diferentes, mientras los sumamos juntos, tienen que ser adimensionales, entonces\[[\sigma]=L \text { and }[\varepsilon]=[U]=\frac{M L^{2}}{T^{2}}\nonumber \].
- \[\begin{array}{l}{4 \epsilon \sigma^{12}=A \text { and } 4 \varepsilon \sigma^{6}=B} \\ {\frac{A}{B}=\sigma^{6} \Longrightarrow \sigma=\left(\frac{A}{B}\right)^{1 / 6}}\end{array}\nonumber \]Al sustituir\(\sigma\) en las expresiones A o B podemos derivar una expresión para\(\varepsilon\):\[\begin{array}{l}{4 \sigma^{6} \varepsilon=B} \\ {4 \varepsilon A=B^{2} \Longrightarrow \varepsilon=\frac{B^{2}}{4 A}}\end{array}\nonumber \]
- c) Figura\(\PageIndex{2}\). Interpretación: ≤es una medida para la profundidad del pozo potencial.æestablece la escala de longitud y por lo tanto la posición del punto de equilibrio.
- Método 1: Calculamos la fuerza como menos la derivada de la energía potencial:\[F=-\frac{\partial U}{\partial r}=4 \varepsilon\left(\frac{12 \sigma^{12}}{r^{13}}-\frac{6 \sigma^{6}}{r^{7}}\right)\nonumber \] Para r pequeños tenemos\(r^{-13} \gt \gt r^{-7}\), por lo que F es positivo y por lo tanto repulsivo. Por el contrario, para mayores tenemos\(r^{-13} \lt \lt r^{-7}\), por lo que F es negativo y por lo tanto atractivo. Método 2: Utilizar el boceto en (c) para ver que la pendiente del potencial es negativa para r pequeña, lo que implica una fuerza repulsiva, y la pendiente del potencial es positiva para mayor, lo que implica una fuerza atractiva.
- Para un punto de equilibrio tenemos\[0=\frac{\partial U}{\partial r}=4 \varepsilon\left(\frac{12 \sigma^{12}}{r^{13}}-\frac{6 \sigma^{6}}{r^{7}}\right)=24 \frac{\varepsilon \sigma^{6}}{r^{7}}\left(\frac{2 \sigma^{6}}{r^{6}}-1\right)\nonumber \] así que solo hay un punto de equilibrio, en\[r_{\mathrm{eq}}=2^{1 / 6} \sigma\nonumber \] Para determinar la estabilidad en este punto, consideramos la segunda derivada de U (r):\[\left.\frac{\partial^{2} U}{\partial r^{2}}\right|_{r=r_{\mathrm{eq}}}=4 \varepsilon\left.\left(42 \frac{\sigma^{6}}{r^{8}}-156 \frac{\sigma^{12}}{r^{14}}\right)\right|_{r=r_{\mathrm{eq}}}=4 \varepsilon\left(\frac{42}{2^{4 / 3} \sigma^{2}}-\frac{156}{2^{7 / 3} \sigma^{2}}\right)=-36 \cdot 2^{2 / 3} \frac{\varepsilon}{\sigma^{2}}<0\nonumber \] lo que significa que el punto de equilibrio es estable. Alternativamente, podríamos haber determinado la estabilidad considerando la gráfica dibujada en (c), a partir de la cual podemos ver que el punto de equilibrio corresponde a un mínimo global de la energía potencial y por lo tanto es estable.