
8.2: Oscilador armónico amortiguado




- Última actualización
- 30 oct 2022
- Guardar como PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Hasta ahora no hemos tenido en cuenta la amortiguación de nuestros osciladores armónicos, lo que por supuesto no es muy realista. La principal fuente de amortiguación para una masa en un resorte se debe al arrastre de la masa cuando se mueve a través del aire (o cualquier fluido, ya sea gas o líquido). Para velocidades relativamente bajas, las fuerzas de arrastre en un objeto escalan linealmente con la velocidad del objeto, como lo ilustra la ley de Stokes (Ecuación 2.2.5). Para un objeto de forma arbitraria que se mueve a través de un fluido arbitrario escribiremosFdrag=−γ˙x, conγ el coeficiente de arrastre, y por supuesto opuesto a la dirección del movimiento. Añadiendo esto a la fuerza del resorte da para la ecuación de movimiento del oscilador armónico amortiguado:
m¨x=−γ˙x−kx
Ahora tenemos dos números que determinan el movimiento: la frecuencia no amortiguadaω0=√k/m y la relación de amortiguaciónζ=γ/2√mk. En términos de estos parámetros, podemos reescribir la ecuación\ ref {dampedharmosc} como:
¨x+2ζω0˙x+ω20x=0
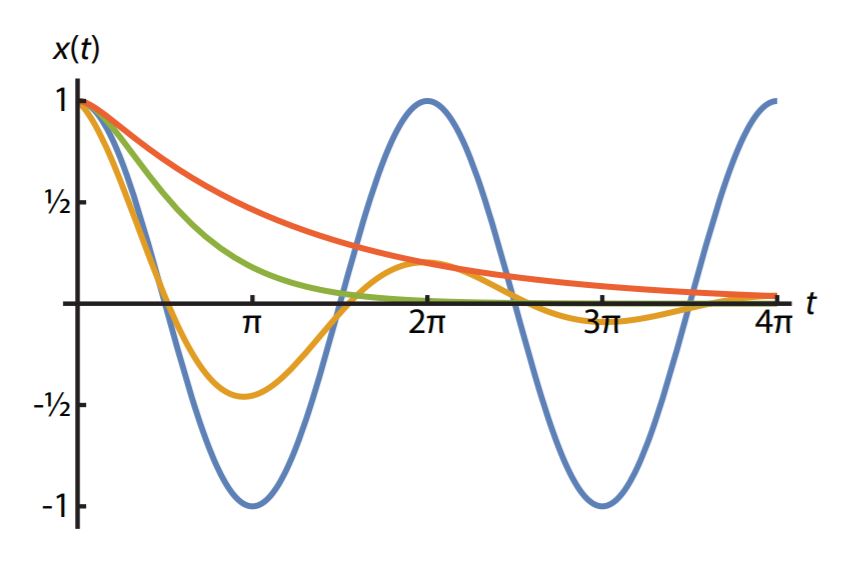
La solución de la Ecuación\ ref {reescrito} depende fuertemente del valor deζ, ver Figura 8.2.1. Podemos encontrarlo 2 sustituyendo el Ansatzx(t)=eλt, que da una ecuación característica paraλ:
λ2+2ζω0λ+ω20=0
por lo
λ=−ζω0±ω0√ζ2−1
Paraζ<1, existen dos soluciones complejas paraλ, y encontramos quex(t) sufre una oscilación con una amplitud exponencialmente decreciente:
x(t)=e−ζω0t[Acos(ωdt)+Bsin(ωdt)]
dondeωd=ω0√1−ζ2 y A y B se derivan de las condiciones iniciales. Debido a que todavía hay una oscilación, este tipo de movimiento se llama subamortiguado. En contraste, siζ>1, las raícesλ± en la Ecuación\ ref {lambda} son reales, y obtenemos un comportamiento cualitativamente diferente, sobreamortiguado, en el que x vuelve a 0 con una decadencia exponencial sin oscilaciones:
x(t)=Aeλ+t+Beλ−t=e−ζω0t[AeΩt+Be−Ωt]
dondeΩ=ω0√ζ2−1. Naturalmente, el caso límite es cuandoζ=1, que es un oscilador amortiguado críticamente, el retorno más rápido a 0 sin oscilaciones. Porque en este caso la Ecuación\ ref {lambda} solo tiene una raíz, nuevamente obtenemos una solución cualitativamente diferente:
x(t)=(A+Bt)e−ω0t
Los tres casos diferentes y la oscilación no amortiguada se muestran en la Figura 8.2.1.
2 Véase el apéndice A.3.2 para conocer los detalles matemáticos sobre cómo resolver ecuaciones generales de este tipo.