
19.7: Momento angular y par para rotación de eje fijo

( \newcommand{\kernel}{\mathrm{null}\,}\)
Hemos demostrado que, para la rotación de eje fijo, el componente del par que hace que la velocidad angular cambie es el análogo rotacional de la Segunda Ley de Newton,
→τextS=IS→α
Ahora veremos que se trata de un caso especial del resultado más general
→τextS=ddt→LsysS
Considera un cuerpo rígido que gira alrededor de un eje fijo que pasa por el puntoS y toma el eje fijo de rotación para que sea el eje z. Recordemos que todos los puntos del cuerpo rígido giran alrededor del eje z con la misma velocidad angular→ω=(dθ/dt)ˆk=ωzˆk. De manera similar, todos los puntos en el cuerpo rígido tienen la misma aceleración angular,→α=(d2θ/dt2)ˆk=αzˆk. Deje que el puntoS se encuentre en algún lugar a lo largo del eje z.
Como antes, el cuerpo se divide en elementos individuales. Calculamos la contribución de cada elemento al momento angular alrededor del puntoS, y luego sumamos sobre todos los elementos. La suma se convertirá en una integral para un cuerpo continuo.
Cada elemento individual tiene una masaΔmj y se mueve en un círculo de radior⊥S,j alrededor del eje de rotación. Dejar→rS,j ser el vector desde el puntoS hasta el elemento. El impulso del elemento,→pj, es tangente a este círculo (Figura 19.16).

El momento angular deljth elemento alrededor del puntoS viene dado por→LS,j=→rS,j×→pj. El vector se→rS,j puede descomponer en componentes paralelos y perpendiculares con respecto al eje de rotación→rS,j=→r‖S,j+→r⊥S,j (Figura 19.16), donder⊥S,j=|→r⊥S,j| and r‖S,j=|→r‖S,j|. El impulso viene dado por→pj=Δmjr⊥S,jωzˆθ. Entonces el momento angular sobre el puntoS es
\ [\ begin {array} {l}
\ overrightarrow {\ mathbf {L}} _ {S, j} =\ overrightarrow {\ mathbf {r}} _ {S, j}\ veces\ overrightarrow {\ mathbf {p}} _ {j} =\ left (r_ {S, j} ^ {\ perp}\ sombrero {\ mathbf {r}} +r_ {S, j} ^ {\ |}\ sombrero {\ mathbf {k}}\ derecha)\ veces\ izquierda (\ Delta m_ {j} r_ {S, j} ^ {\ perp}\ omega_ {z}\ sombrero {\ theta}\ derecha)\\
=\ Delta m_ {j}\ izquierda (r_ {S, j} ^ {\ perp}\ derecha) ^ {2}\ omega_ {z} -\ Delta m_ {j} r_ {S, j} ^ {\ |} r_ {S, j} ^ {\ perp}\ omega_ {z}\ hat {\ mathumbbf {r}}
\ end {array}\ nona_ er\]
En la última expresión de la Ecuación (19.5.22), el segundo término tiene una dirección que es perpendicular al eje z. Por lo tanto el componente z del momento angular alrededor del puntoS(LS,j)z,, surge enteramente del segundo término,→r⊥S,j×→pj. Por lo tanto, el componente z del momento angularS es
(LS,j)z=Δmj(r⊥S,j)2ωz
El componente z del momento angular del sistemaS es la suma sobre todos los elementos,
LssS,z=∑j(Ls,j)z=∑jΔmj(r⊥s,j)2ωz
Para una distribución continua de la masa, la suma se convierte en una integral sobre el cuerpo,
LsysS,z=∫bodydm(rdm)2ωz
donderdm es la distancia desde el eje z fijo hasta el elemento infinitesimal de masa dm. El momento de inercia de un cuerpo rígido alrededor de un eje z fijo que pasa a través de un puntoS viene dado por una integral sobre el cuerpo
IS=∫body dm(rdm)2
Así, la componente z del momento angular alrededorS para un eje fijo que pasaS en la dirección z es proporcional a la componente z de la velocidad angularωz,
LsysS,z=ISωz
Para la rotación de eje fijo, nuestro resultado es que el par alrededor de un punto es igual a la derivada de tiempo del momento angular alrededor de ese punto,
→τextS=ddt→LsysS
ahora se puede resolver en la dirección z,
τextS,z=dLsysS,zdt=ddt(ISωz)=ISdωzdt=ISd2θdt2=ISαz
de acuerdo con nuestro resultado anterior de que el componente z del par alrededor del puntoS es igual al producto del momento de inercia aproximadamenteIS y el componente z de la aceleración angular,αz.
Ejemplo 19.6 Anillo circular
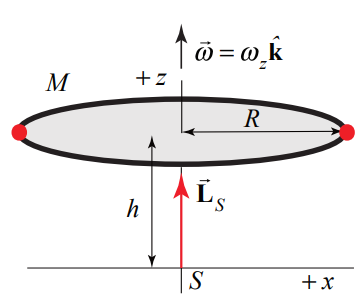
Un anillo circular de radio R y masa M gira alrededor del eje z en un plano paralelo pero a una distancia h por encima del plano x-y. El componente z de la velocidad angular esωz (Figura 19.17). Encuentre la magnitud y la dirección del momento angular a→LS lo largoS en cualquier punto del eje z central.

Solución: Utilice el mismo argumento de simetría que hicimos en el Ejemplo 19.5. El anillo puede pensarse como compuesto por pares de objetos puntiformes en lados opuestos del anillo cada uno de masa m (Figura 19.18).
Cada par tiene un componente z distinto de cero del momento angular tomado alrededor de cualquier puntoS a lo largo del eje z,→Lpair S=→LS,1+→LS,2=2mR2ωzˆk=mpairR2ωzˆk. El momento angular del anillo alrededor del puntoS es entonces la suma sobre todos los pares
→LS=∑paismpairR2ωzˆk=MR2ωzˆk
Recordemos que el momento de inercia de un anillo viene dado por
IS=∫body dm(rdm)2=MR2
Para el anillo simétrico, el momento angular alrededor deS los puntos en la dirección de la velocidad angular y es igual a
→LS=ISωzˆk