
2.10: Péndulos
- Page ID
- 131152

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En la Sección 2.2, se discutió el significado físico de la inercia rotacional como la relación entre el par aplicado y la aceleración angular resultante. En movimiento lineal, estamos familiarizados con la ecuación\( F = ma\). La Ecuación correspondiente cuando se trata de pares y aceleración angular es\( \tau = I\ddot{\theta}\). También estamos familiarizados con la ecuación de movimiento para una masa que vibra al final de un resorte de fuerza constante k:\( m\ddot{x} = -kx \). Se trata de un simple movimiento armónico de época\( 2\pi\sqrt{\frac{m}{k}} \). La mecánica del péndulo de torsión es similar.
La constante\( c \) de torsión de un cable es el par requerido para torcerlo a través del ángulo unitario. Si una masa se suspende de un cable de torsión, y el cable se tuerce a través de un ángulo\( \theta \), el par de restauración será\( c\theta \), y la Ecuación de movimiento es\( I\ddot{\theta} = -c\theta\), que es simple movimiento armónico de período\( 2\pi\sqrt{\frac{I}{c}} \). La constante de torsión de un alambre de sección transversal circular, por cierto, es proporcional a su módulo de cizallamiento, la cuarta potencia de su radio, e inversamente como su longitud. La derivación de esto lleva un poco de problemas, pero se puede verificar mediante análisis dimensional. Por lo tanto, un alambre grueso es mucho más difícil de torcer que uno delgado. Un alambre de sección transversal rectangular estrecha, como una tira o una cinta, tiene una constante de torsión relativamente pequeña.
Ahora veamos no un péndulo de torsión, sino a un péndulo que se balancea alrededor de un eje bajo gravedad.
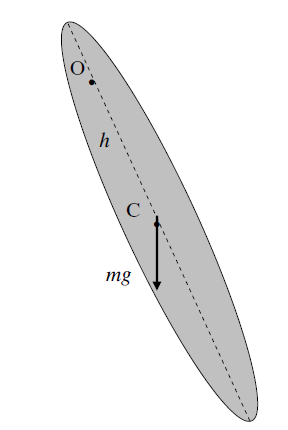
Suponemos que el péndulo, de masa\( m\), se balancea alrededor de un punto O, que está a una\( h\) distancia del centro de masa C. La inercia rotacional alrededor de O es\( I\). La línea OC hace un ángulo\( \theta\) con la vertical, de manera que la distancia horizontal entre O y C es\( h \sin\theta\). El par sobre O es\(mgh \sin\theta\), de modo que la ecuación de movimiento es
\[ I \ddot{\theta} = -mgh\sin\theta. \tag{2.10.1}\label{eq:2.10.1} \]
Para ángulos pequeños (\(\sin \theta \approx \theta\)), esto es
\[ I \ddot{\theta} = -mgh\theta. \tag{2.10.2}\label{eq:2.10.2} \]
Esto es simple movimiento armónico del período
\[ P = 2 \pi \sqrt{\frac{I}{mgh}}. \tag{2.10.3}\label{eq:2.10.3} \]
Veremos dos ejemplos: una varilla uniforme y un arco de círculo.
Primero, una varilla uniforme.
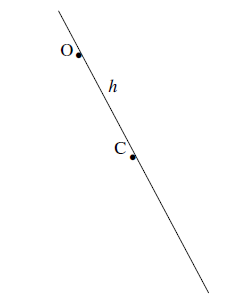
El centro de masa es C. La inercia rotacional alrededor de C es\( \frac{1}{3}ml^{2}\), por lo que la inercia rotacional alrededor de O es\( I = \frac{1}{3}ml^{2} +mh^{2}\). Si sustituimos esto en la ecuación\( \ref{eq:2.10.3}\), encontramos para el período de pequeñas oscilaciones
\[ P = 2\pi\sqrt{\frac{l^{2}+3h^{2}}{3gh}}. \tag{2.10.4}\label{eq:2.10.4} \]
Esto se puede escribir
\[ P = 2\pi\sqrt{\frac{l}{3g}}\cdot\sqrt{\frac{l+3(\frac{h}{l})^{2}}{\frac{h}{l}}}. \tag{2.10.5}\label{eq:2.10.5} \]
o, si escribimos\( \mathsf{P} = \frac{P}{2\pi\sqrt{\frac{l}{3g}}} \) y\( \mathsf{h} = \frac{h}{l}\):
\[ P = \sqrt{\frac{1+3 \mathsf{h}^{2}}{\mathsf{h}}}. \tag{2.10.6}\label{eq:2.10.6} \]
La figura muestra una gráfica de\( \mathsf{P}\) versus\( \mathsf{h}\).

La ecuación se\( \ref{eq:2.10.6}\) puede escribir
\[ \mathsf{P}^{2} = \frac{1}{ \mathsf{h}} + 3 \mathsf{h}. \tag{2.10.7}\label{eq:2.10.7} \]
y, por diferenciación de\( \mathsf{P}^{2}\) con respecto a\( \mathsf{h}\), encontramos que el periodo es menor cuando\( \mathsf{h} = \frac{1}{\sqrt{3}}\).
Este periodo mínimo viene dado por\( \mathsf{P}^{2} = \sqrt{12}\), o\( \mathsf{P} = 1.861\).
La ecuación\( \ref{eq:2.10.7}\) también se puede escribir
\[ \ 3 \mathsf{h}^{2} - \mathsf{P}^{2} \mathsf{h} + 1 = 0 \tag{2.10.8}\label{eq:2.10.8} \]
Esta Ecuación cuadrática muestra que existen dos posiciones del soporte\( O\) que dan lugar al mismo periodo de pequeñas oscilaciones. El periodo es menor cuando las dos soluciones de Ecuación\( \ref{eq:2.10.8}\) son iguales, y por la teoría de Ecuaciones cuadráticas, entonces, el menor periodo viene dado por\( \mathsf{P}^{2} = \sqrt{12}\) como también deducimos por diferenciación de Ecuación\( \ref{eq:2.10.7}\), y esto ocurre cuando\( \mathsf{h} = \frac{1}{\sqrt{3}}\).
Para periodos más largos que este, existen dos soluciones para\( \mathsf{h}\). Deja\( \mathsf{h}_{1}\) ser el más pequeño de estos, y deja\( \mathsf{h}_{2}\) ser el más grande. Por la teoría de las ecuaciones cuadráticas, tenemos
\[ \ \mathsf{h}_{1} + \mathsf{h}_{2} = \frac{1}{3}\mathsf{P}^{2}\tag{2.10.9}\label{eq:2.10.9} \]
y
\[ \ \mathsf{h}_{1}\mathsf{h}_{2} = \frac{1}{3}\tag{2.10.10}\label{eq:2.10.10} \]
Dejar\( \mathsf{H} = \mathsf{h}_{2} - \mathsf{h}_{1}\) ser la distancia entre dos puntos\( O\) que dan el mismo periodo de oscilación.
Entonces
\[ \ \mathsf{H}^{2} = (\mathsf{h}_{2} - \mathsf{h}_{1})^{2} = (\mathsf{h}_{2} + \mathsf{h}_{1})^{2} - 4\mathsf{h}_{1}\mathsf{h}_{2} = \frac{\mathsf{P}^{4}-12}{9}\tag{2.10.11}\label{eq:2.10.11} \]
Si medimos\( \mathsf{H}\) por un periodo determinado\( \mathsf{P}\) y recordamos la definición de\( \mathsf{P}\) vemos que esto proporciona un método para determinar\( g\). Si bien se trata de un ejercicio común de laboratorio de pregrado, la gráfica muestra que el mínimo es muy superficial y en consecuencia\( \mathsf{H}\) y por lo tanto\( g\) son muy difíciles de medir con alguna precisión.
Para otro ejemplo, veamos un alambre doblado en el arco de un círculo de radio que\( a\) oscila en un plano vertical alrededor de su punto medio. En la figura,\( C\) está el centro de masa.
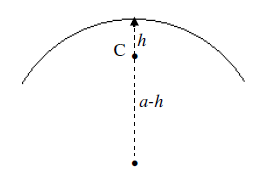
La inercia rotacional alrededor del centrodel círculo es\( ma^{2}\). Por dos aplicaciones del teorema de ejes paralelos, vemos que la inercia rotacional alrededor del punto de oscilación es\( I = ma^{2} - m(a-h)^{2} + mh^{2} = 2mah\) .Así, a partir de la Ecuación\( \ref{eq:2.10.3}\) encontramos
\[ P = 2\pi\sqrt{\frac{2a}{g}}, \tag{2.10.12}\label{eq:2.10.12} \]
y el periodo es independiente de la longitud del arco.