
2.12: Rotación de Ejes
- Page ID
- 131161

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
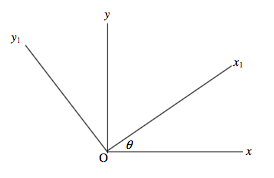
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Comenzamos recordando un resultado de la geometría elemental. Considera dos conjuntos de ejes O\(xy \) y O\(x_{1}y_{1} \), estando este último inclinado en ángulo\( \theta \) con respecto al primero. Cualquier punto en el plano puede ser descrito por las coordenadas\( (x , y) \) o por\( (x_{1} , y_{1})\).
Estas coordenadas están relacionadas por una matriz de rotación:
\[ \left(\begin{array}{c}x_{1} \\ y_{1}\end{array}\right) = \left(\begin{array}{c}\cos \theta \quad \sin \theta \\ -\sin \theta \quad \cos\theta\end{array}\right)\left(\begin{array}{c}x\\ y\end{array}\right), \label{eq:2.12.1} \]
La matriz de rotación es ortogonal; una de las varias propiedades de una matriz ortogonal es que su recíproco es su transposición.
\[ \left(\begin{array}{c}x\\ y\end{array}\right) = \left(\begin{array}{c}\cos \theta \quad -\sin \theta \\ \sin \theta \quad \cos\theta\end{array}\right)\left(\begin{array}{c}x_{1}\\ y_{1}\end{array}\right). \label{eq:2.12.2} \]
Ahora apliquemos esto a los momentos de inercia de una lámina plana. Supongamos que los ejes están en el plano de la lámina y que O es el centro de masa de la lámina. \(A, B \)y\(H\) son los momentos de inercia con respecto a los ejes O\(xy \),\(A_{1} , B_{1} \) y\(H_{1} \) son los momentos de inercia con respecto a O\(x_{1}y_{1} \). Estrictamente hablando una lámina implica una distribución continua de la materia en un plano, pero, como la materia, se nos dice, está compuesta por átomos discretos, hay poca dificultad para justificar tratar una lámina como si fuera una distribución de masas puntuales en el plano. En cualquier caso los resultados que siguen son válidos ya sea para una colección de masas puntuales en un plano o para una lámina continua genuina.
Tenemos, por definición:
\[ A_{1} = \sum my^{2}_{1} \label{eq:2.12.3} \]
\[ B_{1} = \sum mx^{2}_{1} \label{eq:2.12.4} \]
\[ H_{1} = \sum mx_{1}y_{1} \label{eq:2.12.5} \]
Ahora vamos a aplicar la ecuación\( \ref{eq:2.12.1}\) a la ecuación\( \ref{eq:2.12.3}\):
\[\begin{align*} A_{1} &= \sum m (-x \sin \theta + y \cos\theta )^2 \\[4pt] &= \sin^2 \theta \sum mx^2 - 2\sin\theta \cos \theta \sum mxy + \cos^2 \theta \sum my^2. \end{align*}\]
Es decir (escribir primero el tercer término, y el primer término último)
\[ A_{1} = A \cos^2\theta -2H \sin \theta \cos \theta + B\sin^2 \theta. \label{eq:2.12.6} \]
De manera similar, obtenemos para los otros dos momentos
\[ B_{1} = A \sin^2\theta +2H \sin \theta \cos \theta + B\cos^2 \theta. \label{eq:2.12.7} \]
y
\[ H_{1} = A \sin\theta \cos \theta + H \sin(\cos^2 \theta - \sin^2 \theta) - B\sin\theta \cos \theta. \label{eq:2.12.8} \]
Por lo general, es más conveniente hacer uso de identidades trigonométricas para escribir estas como
\[ A_{1} = \frac{1}{2} (B+ A) - \frac{1}{2}(B-A)\cos2\theta - H \sin 2 \theta, \tag{2.12.9}\label{eq:2.12.9} \]
\[ B_{1} = \frac{1}{2} (B+ A) + \frac{1}{2}(B-A)\cos2\theta + H \sin 2 \theta, \tag{2.12.10}\label{eq:2.12.10} \]
\[ H_{1} = H \cos 2 \theta - \frac{1}{2}(B-A)\sin2 \theta \tag{2.12.11}\label{eq:2.12.11} \]
Estas ecuaciones nos permiten calcular los momentos de inercia con respecto a los ejes O\(x_{1}y_{1} \) si conocemos los momentos con respecto a los ejes\(xy \) O. Además, una cuestión de importancia, vemos, de la Ecuación\ ref {eq:2.12.11}, que si
\[ \tan 2 \theta = \frac{2H}{B-A} , \tag{2.12.12} \label{eq:2.12.12} \]
el momento del producto\( H_{1} \) con respecto a los ejes\( Oxy \) es cero. Esto le da algún significado físico al momento del producto, a saber: Si podemos encontrar algunos ejes (que podemos, por medio de la Ecuación\( \ref{eq:2.12.12}\)) con respecto a los cuales el momento del producto es cero, estos ejes se denominan los ejes principales de la lámina, y los momentos de inercia con respecto al principal los ejes se denominan los principales momentos de inercia. Voy a utilizar los símbolos\(A_{0} \) y\( B_{0} \) para los principales momentos de inercia, y aprobaré la convención que\( A_{0} ≤ B_{0} \).
Considere tres masas puntuales en las coordenadas que se indican a continuación:
| Masa | Coordenadas |
|---|---|
| 5 | (1, 1) |
| 3 | (4, 2) |
| 2 | (3, 4) |
Los momentos de inercia son\( A = 49, B = 71, C = 53 \). Las coordenadas del centro de masa son (2.3, 1.9). Si utilizamos el teorema de ejes paralelos, podemos encontrar los momentos de inercia con respecto a ejes paralelos a los originales pero con origen en el centro de masa. Con respecto a estos ejes nos encontramos\( A = 12.9, B = 18.1, H = +9.3 \). Por lo tanto, los ejes principales están inclinados en ángulos con respecto\( \theta \) al\(x \) -eje dado (Ecuación\( \ref{eq:2.12.12}\)) por\( \tan 2 \theta = 3.57669 \); Eso es\( \theta \) = 37 ° 11' y 127 ° 11'. Al usar la Ecuación\ ref {eq:2.12.9} o\ ref {eq:2.12.10} con estos dos ángulos, junto con la convención que\( A_{0} ≤ B_{0} \), obtenemos para los principales momentos de inercia\( A_{0} = 5.84 \) y\(B_{0} = 25.16 \).
Considera la lámina triangular en ángulo recto de la Sección 11. Los momentos de inercia con respecto a los ejes que pasan por el centro de masa y paralelos a los lados ortogonales del triángulo son\(A= \frac{1}{18} Mb^ 2, B= \frac{1}{18} Ma^2, H=− \frac {1}{36} Mab \). Los ángulos que hacen los ejes principales con el lado\( a \) - están dados por\(\tan 2 \theta = \frac{ab}{b^2-a^2} \). El lector interesado podrá elaborar expresiones, en términos de\( M, a, b, \) para los momentos principales.