
8.2: Problema
- Page ID
- 131056

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En esta sección ofrezco un conjunto de problemas diversos. En un problema típico se supone que una fuerza impulsiva o par actúa solo por un tiempo muy corto. Por “un tiempo muy corto”, quiero decir que el tiempo durante el cual actúa la fuerza o par es muy pequeño o es insignificante en comparación con otras veces que podrían estar involucradas en el problema. Por ejemplo, si un palo de golf golpea una pelota, el palo está en contacto con la pelota por un tiempo que es insignificante en comparación con el tiempo en el que la pelota está en el aire. O si un péndulo es sometido a un par impulsivo, el tiempo durante el cual se aplica el par impulsivo es despreciable en comparación con el periodo del péndulo.
En muchos problemas, se le dirá que un cuerpo está sujeto a un impulso\( J\). La forma más fácil de interpretar esto es decir que el impulso lineal del cuerpo cambia repentinamente por\( J\). O puede que le digan que el cuerpo está sometido a un par impulsivo\( K\). La forma más fácil de interpretar esto es decir que el momento angular del cuerpo cambia repentinamente por\( K\).
En algunos de los problemas, por ejemplo el primero, el cuerpo en cuestión se articula libremente sobre un punto fijo; es decir, puede girar libremente alrededor de ese punto.
Antes de dar el primer problema, aquí hay una pequeña historia. Una de las conferencias más inspiradoras a las que recuerdo haber ido fue una impartida por un educador de ciencias. Ella se quejó de que un profesor, en lugar de inspirar a sus alumnos con un amor y aprecio por las grandes y profundas ideas de la ciencia y la civilización, “infantalizó” a la clase con una insistencia tediosa de que la clase use lápices azules para vectores de velocidad, verde para aceleración y rojo para fuerzas. De inmediato reconocí que esta era una excelente manera de impartir a los estudiantes una apreciación de las profundas ideas de la física, e insistí en ello con mis propios alumnos desde entonces. En algunos de los siguientes dibujos he utilizado esta convención de colores, aunque no sé si su computadora va a reproducir los colores que he usado. En cualquier caso, te recomiendo encarecidamente que uses la convención del color tan despreciada por el educador si quieres entender las grandes ideas de la civilización, como las ideas de fuerzas impulsivas.
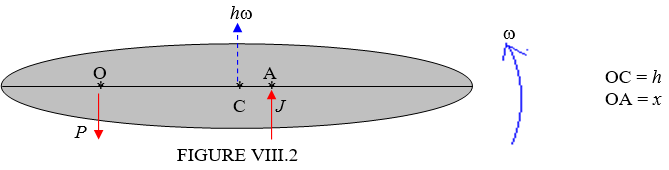
En la Figura VIII.2, un cuerpo es libre de girar alrededor de un eje fijo O. El centro de masa del cuerpo está en C. La distancia OC es h. El cuerpo es golpeado con una fuerza de impulso\( J\) a A, tal que OA =\( x\). La masa del cuerpo es\( m\). Su inercia rotacional sobre C es\( mk^{2}\), y su inercia rotacional sobre O es\( m(k^{2}+h^{2})\).
Como resultado del golpe, el cuerpo girará con velocidad angular w y el centro de masa avanzará con velocidad lineal h w. Una de las preguntas en este problema es calcular\( \omega\)
El cuerpo también empujará con una fuerza impulsiva contra el eje en O. No es inmediatamente obvio si el cuerpo empujará hacia arriba contra el eje en la misma dirección que\( J\), o si el extremo izquierdo del cuerpo balanceará hacia abajo y el cuerpo empujará hacia abajo sobre el eje. Probablemente estarás de acuerdo en que si A está muy cerca de O, el cuerpo empujará hacia arriba sobre el eje, pero si A está cerca del extremo derecho, el cuerpo empujará hacia abajo sobre el eje. En la Figura, estoy asumiendo que el cuerpo empuja hacia arriba sobre el eje; por lo tanto, el eje empuja hacia abajo sobre el cuerpo, con una fuerza de impulso\( P\), y lo que muestra la Figura son las dos fuerzas impulsivas que actúan en el cuerpo. La segunda pregunta que hay que hacer en este problema es encontrar \( P\)en términos de\( J\) y\( x\).
Si tenemos razón en nuestro sentimiento intuitivo que\( P\) actúa hacia arriba o hacia abajo según la posición de A -es decir, en donde se golpea el cuerpo- existe presumiblemente alguna posición de A tal que el impulso reactivo del eje sobre el cuerpo es cero. En efecto la hay, y la posición de A que da lugar a cero impulso reactivo en A se llama centro de percusión, y una tercera cuestión en este problema es encontrar la posición del centro de percusión. ¿Dónde del bate deberías golpear el beisbol si quieres cero reacción impulsiva en tus muñecas? ¿Dónde debe colocar un tope de puerta para dar como resultado una reacción cero en las bisagras de la puerta? Nunca se diga que la física teórica no tiene aplicaciones prácticas importantes. El posicionamiento mismo de un tope de puerta depende de una comprensión profunda de los principios de la mecánica clásica.
El impulso ascendente neto es\( J - P\), y esto da como resultado un cambio en el impulso lineal\( mh\omega\):
\[ J - P = mh\omega \tag{8.2.1}\label{eq:8.2.1} \]
El par impulsivo alrededor de O es\( Jx\), y esto da como resultado un cambio en el momento angular\( I\omega\); es decir\( m(k^{2}+h^{2})\omega\):
\[ Jx=m(k^{2}+h^{2})\omega. \tag{8.2.2}\label{eq:8.2.2} \]
Estas dos ecuaciones nos permiten resolver para las dos incógnitas\( \omega\) y\( P\). En efecto, Ecuación nos\( \ref{eq:8.2.2}\) da\( \omega\) inmediatamente, y la eliminación de\( \omega\) entre las dos ecuaciones nos da\( P\):
\[ P = J\left(1-\frac{xh}{k^{2}+h^{2}}\right). \tag{8.2.3}\label{eq:8.2.3} \]
Si el lado derecho de la Ecuación\( \ref{eq:8.2.3}\) es positivo, entonces la Figura VIII.2 es correcta: el eje empuja hacia abajo sobre el cuerpo, y el cuerpo empuja hacia arriba sobre el eje. Es decir, \( P\)actúa hacia abajo si\( x<\frac{k^{2}+h^{2}}{h}\), y hacia arriba si\( x>\frac{k^{2}+h^{2}}{h}\). La posición del centro de percusión es\( x=\frac{k^{2}+h^{2}}{h}\).
Si el cuerpo es una varilla uniforme de longitud\( l\), O is at one end of the rod, then \( k^{2}=\frac{1}{12}l^{2}\) so that, in this case, \( x=\frac{2}{3}l\). Aquí es donde debes colocar un tope de puerta. También es donde debes golpear una pelota de béisbol con el bate, si el bate es una varilla uniforme. No obstante, admito no saber mucho sobre bates de béisbol, y si tal bate no es una varilla uniforme, sino que es, por ejemplo, más grueso y pesado en el extremo distal que en el extremo proximal, el centro de percusión estará más hacia el otro extremo.
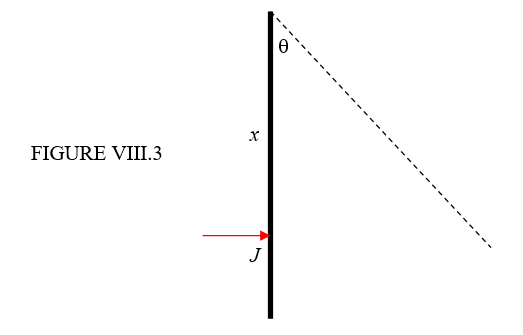
Una varilla pesada, de masa\( m\) y longitud\( 2l\), cuelga libremente de un extremo. Se le da un impulso\( J\) como se muestra en un punto a una \( x\)distancia del extremo superior. Calcular la altura angular máxima a través de la cual se eleva la varilla.
Podemos usar Ecuación\( \ref{eq:8.2.2}\) para encontrar la velocidad angular\( \omega\) inmediatamente después del impacto. En esta ecuación,\( m(k^{2}+h^{2})\) se encuentra la inercia rotacional de la varilla alrededor de su extremo, que es\( \frac{4ml^{2}}{3}\), de manera que
\( \omega = \frac{3Jx}{4ml^{2}}\).
La energía cinética inmediatamente después del impacto es\( \frac{1}{2}\cdot\frac{4}{3}ml^{2}\cdot\omega^{2}\) y tenemos que equipararla a la posterior ganancia de energía potencial\( mgl(1-\cos\theta)\).
Así
\( \cos\theta=1-\frac{2l\omega^{2}}{3g}=1-\frac{2J^{2}x^{2}}{8gm^{2}l^{3}}\).
Para que la varilla oscile 180 o, el impulso angular aplicado debe ser
\( Jx=4ml\sqrt{\frac{gl}{3}}\).
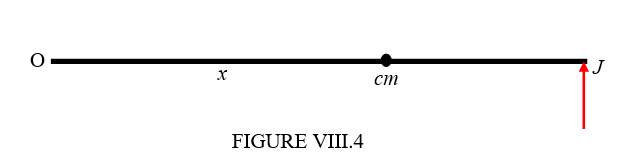
Una varilla uniforme de masa\( m\) y longitud\( 2l\) está articulada libremente en un extremo O. Una masa\( cm\) (donde\( c\) es una constante) se une a la varilla a una distancia\( x\) de O.\( J\) Se aplica un impulso al otro extremo de la varilla desde O. ¿Dónde\( cm\) se debe posicionar la masa si la velocidad lineal de la masa\( cm\) inmediatamente después de la aplicación del impulso va a ser mayor?
El impulso angular sobre O es\( 2lJ\). La inercia rotacional sobre O es\( \frac{4}{3}ml^{2}+cmx^{2}\). Si w es la velocidad angular inmediatamente después del golpe, el momento angular es\( (\frac{4}{3}ml^{2}+cmx^{2})\omega\). Si equiparamos esto al impulso, encontramos
\( \omega=\frac{6lJ}{m(4l^{2}+3cx^{2})}\).
La velocidad lineal de la masa\( cm\) es\( x\) veces esto, o\( \frac{6lJ}{m(4l^{2}+3cx^{2})}\). Por cálculo, esto es mayor cuando\( x=\frac{2l}{\sqrt{3c}}\).
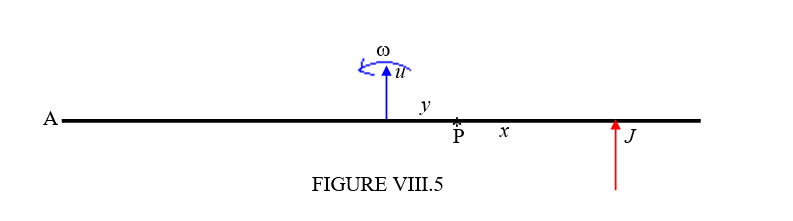
Una varilla uniforme es de masa\( m\) y longitud\( 2l\). \( J\) Se aplica un impulso como se muestra a una\( x\) distancia del punto medio de la varilla. P es un punto a una distancia y desde el punto medio de la varilla. ¿P se mueve hacia adelante o hacia atrás? ¿De qué manera se mueve A?
Lo primero que podemos hacer es encontrar la velocidad lineal\( u\) del centro de masa de la varilla y la velocidad angular\( \omega\) de la varilla. Esto lo hacemos equiparando el impulso con el aumento del impulso lineal y el momento del impulso (es decir, el impulso angular) con el aumento del momento angular:
\( J = mu\)
y
\( Jx=\frac{1}{3}ml^{2}\omega\).
La velocidad de avance de P es\( u +y\omega\). Es decir\( \frac{J}{m}+\frac{3Jxy}{ml^{2}}\). Esto es positivo si\( y>-\frac{l^{2}}{3x}\) pero negativo por lo demás. Para el punto A,\( y=-l\), para que A avance si\( x<\frac{l}{3}\), y se moverá hacia atrás de lo contrario.

Un planeta esférico, masa\( m\), radio\( a\), es alcanzado por un asteroide con un impulso\( J\) como se muestra, siendo el parámetro de impacto\( x\). P es un punto en el diámetro, a una\( y\) distancia del centro del planeta. ¿P se mueve hacia adelante o hacia atrás? ¿De qué manera se mueve A?
Al igual que en el problema anterior, podemos encontrar fácilmente\( u\) y\( \omega\):
\( J = mu\)
y
\( Jx = \frac{2}{5}ma^{2}\omega\).
La velocidad de avance de P es\( u+y\omega\). Es decir\( \frac{J}{m}(1+\frac{5xy}{2a^{2}})\). Esto es positivo si\( y>-\frac{2a^{2}}{5x}\) pero negativo por lo demás. Para el punto A,\( y=-a\), para que A avance si\( x<\frac{2a}{5}\), y se moverá hacia atrás de lo contrario. Es decir, A se moverá hacia atrás si el golpe es más del 70% del camino de A a B.
Un aro, radio\( a\), masa\( m\), moviéndose a velocidad\( v\), golpea un bordillo de altura\( h\) como se muestra. ¿Montará el bordillo o retrocederá?
El único impulso actúa en el punto A. El momento del impulso sobre A es por lo tanto cero, y por lo tanto no hay cambio en el momento angular con respecto al punto A.
Antes del impacto, el momento angular con respecto al punto A es
\( mva+mv(a-h)=mv(2a-h)\).
Dejar\( \omega\) ser la velocidad angular sobre A después del impacto. El momento angular alrededor de A es entonces\( 2ma^{2}\omega\). Estos son iguales, de manera que
\( \omega=\frac{(2a-h)v}{2a^{2}}\)
Si es para montar el bordillo, la nueva energía cinética\( \frac{1}{2}(2ma^{2})\omega^{2}\) debe ser mayor que la energía potencial que se va a superar,\( mgh\).
Por lo tanto
\( v>\frac{2a\sqrt{gh}}{2a-h}\).
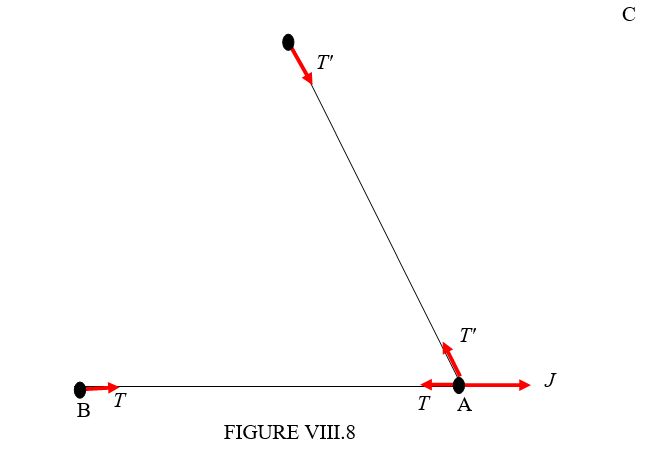
Tres partículas iguales, A, B y C, cada una de masa m, están unidas por cuerdas ligeras inextensibles como se muestra, siendo el ángulo BAC 60 o. A se le da un fuerte tirón de impulso\( J\) como se muestra. Encuentra las velocidades iniciales de las partículas y las tensiones iniciales en las cuerdas.
Que las tensiones iniciales en BA y AC sean\( T\) y\( T'\) respectivamente.
Deja que la velocidad inicial de A sea\( u\bf{i}+v\bf{j}\).
Entonces la velocidad inicial de B es\( u\bf{i}\)
y la velocidad inicial de C es\( \frac{1}{2}(u-\sqrt{3v})\) hacia A.
Las ecuaciones del movimiento impulsivo son:
Para B:
\( mu=T\)
Para C:
\( \frac{1}{2}(u-\sqrt{3v})=T'\)
Para A:
\( mu=J-T-\frac{1}{2}T'\)
\( mv=\frac{1}{2}\sqrt{3}T'\)
Las soluciones de estas ecuaciones son:
\( u=\frac{7J}{15m}\),\( v=\frac{\sqrt{3}J}{15m}\),
\( T=\frac{7J}{15}\),\( T'=\frac{2J}{15}\).
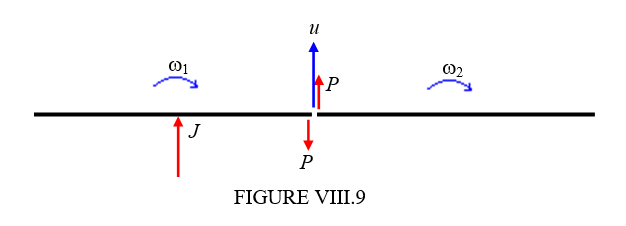
Dos varillas, cada una de masa\( m\) y longitud\( 2l\), están unidas libremente como se muestra. A uno de ellos se le da un impulso\( J\) como se muestra. Lo que sucede entonces es que el extremo de una varilla le da al extremo de la otra una patada impulsiva\( P\), y la otra le da a la una una patada igual en sentido contrario. El centro de masa del sistema avanza con velocidad\( u\) y las dos varillas giran con velocidades angulares\( \omega_{1}\) y\( \omega_{2}\). El problema es determinar\( P\),\( u\),\( \omega_{1}\) y\( \omega_{2}\).
Las ecuaciones del movimiento impulsivo son:
Barra LH, traducción:
\( J-P=m(u+l\omega_{1})\),
Barra RH, traducción:
\( P=m(u+l\omega_{2})\)
Varilla LH, rotación:
\( Pl=\frac{1}{3}ml^{2}\omega_{1}\)
Barra derecha, rotación:
\( Pl=\frac{1}{3}ml^{2}\omega_{1}\)
Las soluciones a estas ecuaciones son:
\( u=\frac{J}{2m}\),
\( \omega_{1}=\omega_{2}=\frac{3J}{8ml}\),
\( P=\frac{J}{8}\).

Dos varillas, cada una de masa\( m\) y longitud\( 2l\), se unen libremente inicialmente en ángulo recto. Se dejan caer sobre una mesa horizontal lisa y la golpean con velocidad\( V\). Encuentra la velocidad\( \dot{\theta}\) a la que las varillas se separan inmediatamente después del impacto.
Consideramos la dinámica de la varilla derecha. Al impactar, experimenta un impulso vertical\( J\) en su extremo inferior, y experimenta un impulso horizontal\( P\) (desde la otra varilla) en su extremo superior. Inmediatamente después del impacto, deje que los componentes de la velocidad del centro de masa de la varilla derecha sean\( u\) y\( v\), y la velocidad angular de la varilla es la cantidad requerida\( \dot{\theta}\).
Desde la geometría, tenemos
\( x=l\sin\theta\)y\( y=l\cos\theta\)
y por lo tanto
\( u=\dot{x}=l\cos\theta\dot{\theta}=\frac{l\dot{\theta}}{\sqrt{2}}\)y\( v=-\dot{y}=l\sin\theta\dot{\theta}=\frac{l\theta}{\sqrt{2}}\).
Las ecuaciones impulsivas del movimiento son
\( P=mu\)
y
\( J=m(V-v)\).
Después de eso, algunos resultados de álgebra en
\( \dot{\theta}=\frac{\sqrt{18}V}{8l}\).
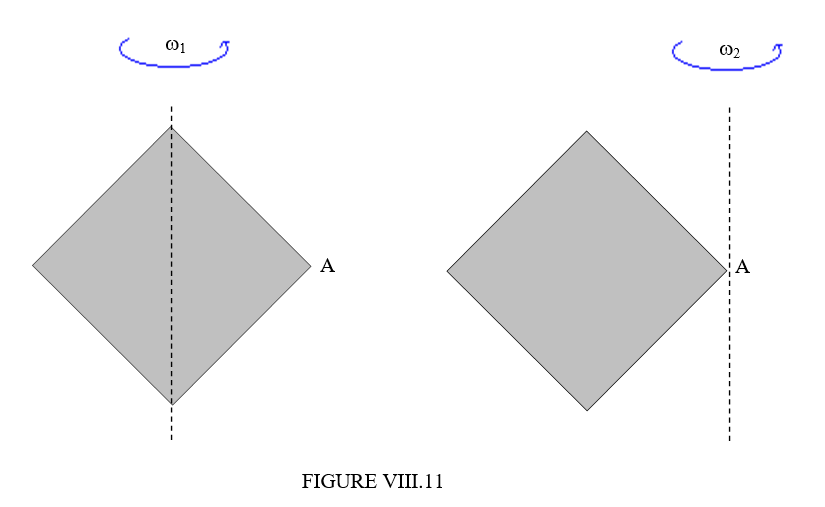
Una placa cuadrada gira alrededor de un diámetro vertical a velocidad angular\( \omega_{1}\). Golpea un obstáculo fijo en la esquina A, de manera que posteriormente gira alrededor de un eje vertical a través de A a velocidad angular\( \omega_{2}\). Encuentra\( \omega_{2}\).
Dado que el impulso está en A, el momento del impulso sobre A es cero, por lo que se conserva el momento angular alrededor de A. Los momentos relevantes de inercia pueden calcularse a partir de la información del Capítulo 2, y por lo tanto obtenemos
\( \frac{1}{3}ma^{2}\omega_{1}=\frac{7}{3}ma^{2}\omega_{2}\).
\( \omega_{2}=\frac{\omega_{1}}{7}\).