
17.6: Molécula Triatómica Lineal
- Page ID
- 131459

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En el Capítulo 2, Sección 2.9, se discutió una molécula triatómica rígida. Ahora vamos a discutir tres masas unidas por resortes, de constantes de fuerza\(k_1 \) y\(k_2\). Vamos a permitir que vibre, pero no que gire. También, por el momento, no quiero que la molécula se doble, así que la pondremos dentro de una pajita para beber para que todas las vibraciones sean lineales. Por cierto, para las moléculas triatómicas reales, las constantes de fuerza y las inercias rotacionales son tales que las moléculas vibran mucho más rápido de lo que rotan. Para ver sus vibraciones se mira en el espectro infrarrojo cercano; para ver su rotación, hay que ir al infrarrojo lejano o al espectro de microondas.
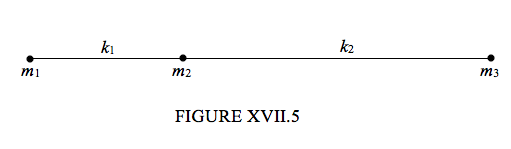
Supongamos que las separaciones de equilibrio de los átomos son\(a_1\) y\(a_2\). Supongamos que en algún instante del tiempo, las coordenadas x (distancias desde el borde izquierdo de la página) de los tres átomos son\(x_1, x_2 , x_3\). Las extensiones de las distancias de equilibrio son entonces\( q_1 = x_2 - x_1 - a_1, q_2 = x_3 - x_2 - a_2 \). Ya estamos listos para comenzar:
\[ T = \frac{1}{2}m_1\dot{x}^2_1 + \frac{1}{2}m_2\dot{x}^2_2 + \frac{1}{2}m_2\dot{x}^2_3, \label{17.6.1} \]
\[ V = \frac{1}{2}k_1q^2_1 + \frac{1}{2}k_2q^2_2. \label{17.6.2} \]
Necesitamos expresar la energía cinética en términos de la coordenada interna y, al igual que para la molécula diatómica (Sección 17.2), las ecuaciones relevantes son
\[ \dot{q}_1 = \dot{x}_2- \dot{x}_1, \label{17.6.3} \]
\[ \dot{q}_2 = \dot{x}_3- \dot{x}_2, \label{17.6.4} \]
y
\[ 0 = m_1\dot{x}_1 + m_2\dot{x}_2 + m_3\dot{x}_3 . \label{17.6.5} \]
Estos pueden escribirse convenientemente
\[ \begin{pmatrix}\dot{q}_1\\ \dot{q}_2 \\0\end{pmatrix} = \begin{pmatrix}-1 & 1 & 0 \\ 0 & -1 & 1\\ m_1 & m_2 & m_3\end{pmatrix}\begin{pmatrix}\dot{x}_1\\ \dot{x}_2 \\\dot{x}_3\end{pmatrix} \label{17.6.6} \]
Por un diminuto movimiento de los dedos (!) invertimos la matriz para obtener
\[ \begin{pmatrix}\dot{x}_1\\ \dot{x}_2 \\\dot{x}_3\end{pmatrix} = \begin{pmatrix}-\frac{m_2+m_3}{M} & -\frac{m_3}{M} & \frac{1}{M} \\ \frac{m_1}{M} & -\frac{m_3}{M} & \frac{1}{M}\\ \frac{m_1}{M} & \frac{m_1+m_2}{M} & \frac{1}{M}\end{pmatrix} \begin{pmatrix}\dot{q}_1\\ \dot{q}_2 \\0\end{pmatrix}, \label{17.6.7} \]
donde\( M = m_1 + m_2 + m_3 \). Al ponerlos en Ecuación\( \ref{17.6.1}\), ahora tenemos
\[ T = \frac{1}{2}(a\dot{q}^2_1 + 2h\dot{q}_1\dot{q}_2 + b\dot{q}^2_2) \label{17.6.8} \]
y
\[ V = \frac{1}{2}k_1q^2_1 + \frac{1}{2}k_2q^2_2 \label{17.6.2.} \]
donde
\[ a = m_1(m_2+m_3)/M, \label{17.6.9} \]
\[ h = m_3m_1/M, \label{17.6.10} \]
\[ b = m_3(m_1+m_2)/M \label{17.6.11} \]
y para futuras referencias,
\[ ab-h^2 = m_1m_2m_2 / M = m^2h. \label{17.6.12} \]
Al aplicar la ecuación de Lagrange a su vez a las dos coordenadas internas obtenemos
\[ a\ddot{q}_1 + h\ddot{q}_2 + k_1q_1 = 0 \label{17.6.13} \]
y
\[ b\ddot{q}_2 + h\ddot{q}_2 + k_2q_2 = 0 \label{17.6.14} \]
Buscar soluciones de la forma\( \ddot{q}_1 = - \omega^2 q_1 \) y\( \ddot{q}_2 = - \omega^2 q_2 \) y obtenemos las siguientes dos expresiones para los ratios de extensión:
\[ \frac{q_1}{q_2} = \frac{h \omega^2}{k_1-a \omega^2}= \frac{k_2 - b \omega^2}{h \omega ^2} . \label{17.6.15} \]
Igualarlos da la ecuación para las frecuencias de modo normal:
\[ (ab - h^2)\omega^4 - (ak_2 + bk_1)\omega^2 + k_1k_2 = 0. \label{17.6.16} \]
Por ejemplo, si\( k_1 = k_2 = l \) y\(m_1 = m_2 = m_3 = m \), obtenemos, para el modo simétrico lento (“respiración”),\(q_1/q_2 = +1 \) y\( \omega^2 = k/m \). Para el modo asimétrico rápido,\(q_1/q_2 = -1 \) y\(\omega^2 = 3k/m\).
Ejemplo.
Consideremos la molécula lineal de OCS cuyos átomos tienen masas 16, 12 y 32. Supongamos que las frecuencias angulares de los modos normales, determinadas a partir de la espectroscopia infrarroja, son 0.905 y 0.413. (Acabo de inventar estos números, en unidades no declaradas, sólo con el propósito de ilustrar el cálculo. Sin buscar en la literatura, no puedo decir cuáles son en la verdadera molécula OCS.) Determinar las constantes de fuerza.
En el Capítulo 2 consideramos una molécula triatómica rígida. Nos dieron el momento de inercia, y nos pidieron que encontráramos las dos distancias internucleares. No podíamos hacer esto con solo un momento de inercia, así que hicimos una sustitución isotópica (18 O en lugar de 16 O) para obtener una segunda ecuación, y así luego podríamos resolver para las dos distancias internucleares. Esta vez, estamos lidiando con la vibración, y vamos a usar Ecuación\( \ref{17.6.16}\) para encontrar las dos constantes de fuerza. Esta vez, sin embargo, se nos dan dos frecuencias (de los modos normales), y así no tenemos necesidad de hacer una sustitución isotópica − ya tenemos dos ecuaciones.
Aquí están los datos necesarios.
16 OCS
Rápido\(\omega\) 0.905
Lenta\(\omega\) 0.413
\(m_1 m_2 m_3 \)16 12 32
\(M\)60
\(a\)11.73
\(h\)8.53
\(b\)14.93
\(ab − h^2\)102.4
Usa la ecuación 17.6.16 para cada una de las frecuencias, y obtendrás dos ecuaciones, en\(k_1\) y\(k_2\). Al igual que en el caso rotacional, son ecuaciones cuadráticas, pero son un poco más fáciles de resolver que en el caso rotacional. Obtendrás dos ecuaciones, cada una de la forma de\( A - Bk_1 - Ck_2 + k_1k_2 = 0\), donde los coeficientes son funciones de\(a, b, h, \omega\). Tendrás que calcular los valores de estos coeficientes, pero, antes de sustituir los números en, es posible que quieras pensar un poco en cómo harías para resolver dos ecuaciones simultáneas de la forma\( A - Bk_1 - Ck_2 + k_1k_2 = 0\).
Encontrarás que existen dos posibles soluciones:
\( k_1 = 2.8715 \qquad k_2 = 4.9818\)
y
\( k_1 = 3.9143 \qquad k_2 = 3.6547\)
Ambos resultarán en las mismas frecuencias. Se necesitaría alguna información adicional para determinar cuál obtiene para la molécula real, tal vez con mediciones en un isotopómero, como 18 OCS.
Obsérvese que en esta sección se consideró una molécula triatómica lineal a la que no se le permitía girar ni doblarse, mientras que en el Capítulo 2 se consideró una molécula triatómica rígida a la que no se le permitía vibrar ni doblarse. Si se eliminan todas estas restricciones, la situación se vuelve bastante más complicada. Si una molécula giratoria vibra, los átomos móviles, en un marco de referencia co-rotativo, están sujetos a la fuerza de Coriolis, y por lo tanto no se mueven en línea recta. Además, a medida que vibra, la inercia rotacional cambia periódicamente, por lo que la rotación no es uniforme. Si permitimos que la molécula se doble, el átomo medio puede oscilar hacia arriba y hacia abajo en el plano del papel (por así decirlo) o de ida y vuelta en ángulo recto con el plano del papel. Estos dos movimientos no necesariamente tendrán ni la misma amplitud ni la misma fase. En consecuencia, el átomo medio girará alrededor en una elipse Lissajous, dando lugar a lo que se ha llamado “momento angular vibracional”. En una molécula triatómica real, las vibraciones suelen ser mucho más rápidas que la rotación relativamente lenta y ponderosa, por lo que la interacción vibración-rotación es pequeña —pero de ninguna manera es despreciable y se observa fácilmente en el espectro de la molécula.