
8.5: Aplicaciones de la Dinámica Hamiltoniana




- Última actualización
- 30 oct 2022
- Guardar como PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Las ecuaciones de movimiento de un sistema se pueden derivar utilizando el hamiltoniano junto con las ecuaciones de movimiento de Hamilton, es decir, ecuaciones(8.3.11−8.3.13).
Formalmente el hamiltoniano se construye a partir del lagrangiano. Eso es
- Seleccionar un conjunto de coordenadas generalizadas independientesqi
- Particionar las fuerzas activas.
- Construye el LagrangianoL(qi,˙qi,t)
- Derivar el momento generalizado conjugado víapi=∂L∂˙qi
- SaberL,˙qi,pi derivarH=∑ipi˙qi−L
- Derivar˙qk=∂H∂pk y˙pj=−∂H(q,p,t)∂qj+∑mk=1λk∂gk∂qj+QEXCj.
Este procedimiento parece ser innecesariamente complicado en comparación con el solo uso de la mecánica lagrangiana más lagrangiana para derivar las ecuaciones de movimiento. Afortunadamente, el largo procedimiento anterior a menudo se puede pasar por alto para los sistemas conservadores. Es decir, si se cumplen las siguientes condiciones;
- L=T(.q)−U(q), es decir,U(q) es independiente de la velocidad˙q.
- las coordenadas generalizadas son independientes del tiempo.
entonces es posible utilizar el hecho de que
H=T+U=E.
Los siguientes cinco ejemplos ilustran el uso de la mecánica hamiltoniana para derivar las ecuaciones de movimiento.
Ejemplo8.5.1: Motion in a uniform gravitational field
Considera una masam en un campo gravitacional uniforme que actúa en la−z dirección. El lagrangiano para este sencillo caso es
L=12m(˙x2+˙y2+˙z2)−mgz
Por lo tanto los momentos generalizados sonpx=∂L∂˙x=m˙x,py=∂L∂˙y=m˙y,pz=∂L∂˙z=m˙z. El hamiltoniano correspondienteH es
H=∑ipi˙qi−L=px˙x+py˙y+pz˙z−L=p2xm+p2ym+p2zm−12(p2xm+p2ym+p2zm)+mgz=12(p2xm+p2ym+p2zm)+mgz
Obsérvese que el lagrangiano no depende explícitamente del tiempo, por lo que el hamiltoniano es una constante de movimiento.
Las ecuaciones de Hamilton dan eso˙x=∂H∂px=pxm−˙px=∂H∂x=0˙y=∂H∂py=pym−˙py=∂H∂y=0˙z=∂H∂pz=pzm−˙pz=∂H∂z=mg
Combinar estos da eso¨x=0,¨y=0,¨z=−g. Obsérvese que los momentos linealespx ypy son constantes de movimiento mientras que la velocidad de cambio depz viene dada por la fuerza gravitacionalmg. Obsérvese también queH=T+U para este sistema conservador.
Ejemplo8.5.2: One-dimensional harmonic oscillator
Considerar una masam sujeta a una fuerza de restauración lineal con constante de resortek. El LagrangianoL=T−U es igual
L=12m˙x2−12kx2
Por lo tanto, el impulso generalizado es
px=∂L∂˙x=m˙x
El hamiltonianoH es
H=∑ipi˙qi−L=px˙x−L=pxpxm−12p2xm+12kx2=12p2xm+12kx2
Obsérvese que el lagrangiano no depende explícitamente del tiempo, así el hamiltoniano será una constante de movimiento. Las ecuaciones de Hamilton dan eso
˙x=∂H∂px=pxm
o
px=m˙x
Además
−˙px=∂H∂x=∂U∂x=kx
Combinar estos da que
¨x+kmx=0
que es la ecuación de movimiento para el oscilador armónico.
Ejemplo8.5.3: Plane pendulum
El péndulo plano, en un campo gravitacional uniforme,g, es un sistema interesante a considerar. Solo hay una coordenada generalizada,θ y la lagrangiana para este sistema es
L=12ml2˙θ2+mglcosθ
El momento conjugado aθ es
pθ=∂L∂˙θ=ml2˙θque es el momento angular alrededor del punto de pivote.
El hamiltoniano es
H=∑ipi˙qi−L=pθ˙θ−L=12ml2˙θ2−mglcosθ=p2θ2ml2−mglcosθLas ecuaciones de movimiento de Hamilton dan
˙θ=∂H∂pθ=pθml2
.˙pθ=−∂H∂θ=−mglsinθ
Obsérvese que los lagrangianos y hamiltonianos no son funciones explícitas del tiempo, por lo tanto se conservan. También el potencial es independiente de la velocidad y no hay transformación de coordenadas, así el hamiltoniano equivale a la energía total, es decir
H=p2θ2ml2−mglcosθ=E
dondeE es una constante de movimiento. Tenga en cuenta que el momento angular nopθ es una constante de movimiento ya que˙pθ explícitamente depende deθ.
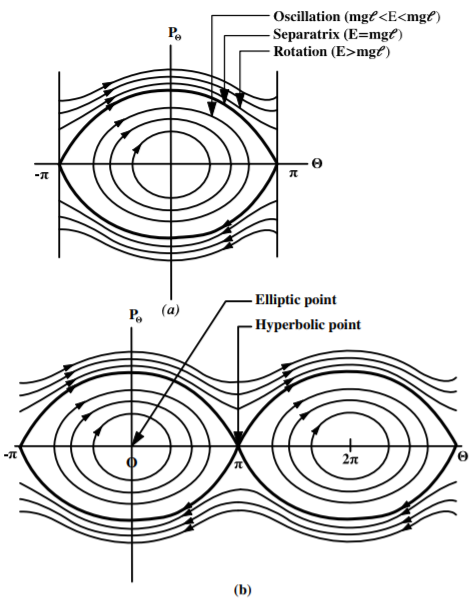
Las soluciones para el péndulo plano en un diagrama de(θ,pθ) fases, mostradas en la figura adyacente, ilustran el movimiento. La gráfica fase-espacio superior muestra el rango(θ=±π,pθ). Tenga en cuenta que elθ=+π y−π corresponden al mismo punto físico, es decir, el diagrama de fases se debe enrollar en un cilindro conectado a lo largo de las líneas discontinuas. La gráfica de espacio de fase inferior muestra dos ciclosθ para ilustrar mejor la naturaleza cíclica del diagrama de fases. El diagrama estado-espacio correspondiente se muestra en la Figura3.4.2. Las trayectorias son elipses de baja energía−mgl<E<mgl correspondientes a oscilaciones del péndulo alrededorθ=0. El centro de la elipse(0,0) es un punto de equilibrio estable para la oscilación. Sin embargo, hay un cambio de fase al movimiento rotacional alrededor del eje horizontal cuando|E|>mgl, es decir, el péndulo oscila alrededor de un círculo continuamente, es decir, gira continuamente en una dirección alrededor del eje horizontal. El cambio de fase ocurre enE=mgl. y es designado por la trayectoria separatriz.
La gráfica depθ versusθ para el péndulo plano se presenta mejor en una representación de espacio de fase cilíndrica ya queθ es una variable cíclica que gira alrededor del cilindro, mientras quepθ oscila por igual alrededor de cero teniendo valores tanto positivos como negativos. Cuando se envuelve alrededor de un cilindro, los puntos de equilibrio inestables y estables estarán en ubicaciones diametralmente opuestas en la superficie del cilindro enpθ=0. Para pequeñas oscilaciones sobre el equilibrio, también llamadas libraciones, la correlación entrepθ yθ viene dada por las elipses cerradas en sentido horario envueltas en la superficie cilíndrica, mientras que para las energías|E|>mgl el positivopθ corresponde a rotaciones en sentido antihorario mientras que el negativo pθcorresponde a rotaciones en sentido horario.
Ejemplo8.5.4: Hooke's law force constrained to the surface of a cylinder
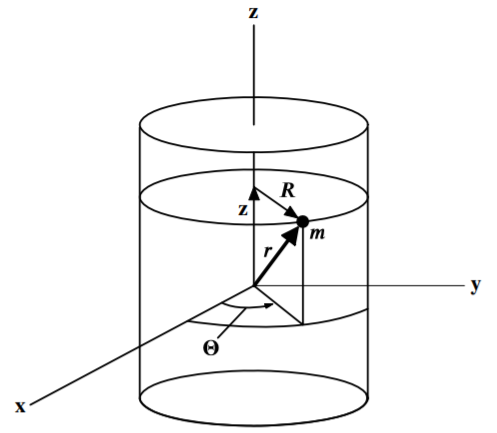
Consideremos el caso donde una masam es atraída por una fuerza dirigida hacia el origen y proporcional a la distancia desde el origen. Determine el hamiltoniano si la masa está restringida para moverse sobre la superficie de un cilindro definido por
x2+y2=R2
Es natural transformar este problema en coordenadas cilíndricasρ,z,θ. Dado que la fuerza es solo la ley de Hooke
F=−kr
el potencial es el mismo que para el oscilador armónico, es decir
U=12kr2=12k(ρ2+z2)
Esto es independienteθ, y por lo tantoθ es cíclico.
pz=∂L∂˙z=m˙z
El sistema es conservador y la transformación de coordenadas rectangulares a cilíndricas no depende explícitamente del tiempo. Por lo tanto el hamiltoniano se conserva y equivale a la energía total. Eso es
H=∑ipi˙qi−L=p2θ2mR2+p2z2m+12k(R2+z2)=E
Las ecuaciones de movimiento luego vienen dadas por las ecuaciones canónicas˙pθ=−∂H∂θ=0˙θ=∂H∂pθ=pθmR2˙pz=−∂H∂z=−kz˙z=∂H∂pz=pzm
La ecuación\ ref {a} y\ ref {c} implican que
pθ=∂L∂.θ=mR2˙θ=constant
Así se conserva el momento angular alrededor del eje del cilindro, es decir, es una variable cíclica.
Combinar ecuaciones\ ref {b} y\ ref {d} implica que
¨z+kmz=0
Esta es la ecuación para el movimiento armónico simple con frecuencia angularω=√km. Las simetrías implican que este problema tiene las mismas soluciones para laz coordenada que el oscilador armónico, mientras que laθ coordenada se mueve con velocidad angular constante.
Ejemplo8.5.5: Electron motion in a cylindrical magnetron
Un magnetrón comprende un cátodo de alambre cilíndrico caliente que emite electrones y está a un alto voltaje negativo. Está rodeado por un ánodo cilíndrico concéntrico de mayor diámetro a potencial de tierra. Un campo magnético uniforme corre paralelo al eje cilíndrico del magnetrón. El haz de electrones excita un conjunto múltiple de cavidades de microondas ubicadas alrededor de la circunferencia de la pared cilíndrica del ánodo. El magnetrón fue inventado en Inglaterra durante la Segunda Guerra Mundial para generar microondas requeridas para el desarrollo del radar.
Considerar un electrón no relativista de masam y carga−e en un magnetrón cilíndrico que se mueve entre el cable catódico central, de radioa a un potencial eléctrico negativo−ϕ0, y un conductor de ánodo cilíndrico concéntrico de radioR que tiene cero eléctrico potencial. Existe un campo magnético constante uniformeB paralelo al eje cilíndrico del magnetrón.
Usando unidades SI y coordenadas cilíndricas(r,θ,z) alineadas con el eje del magnetrón, la fuerza electromagnética Lagrangiana, dada en el capítulo6.10, es igual
L=12m˙r2+e(ϕ−˙r⋅A)
Los potenciales eléctricos y vectoriales para la geometría del magnetrón son
ϕ=−ϕ0ln(rR)ln(aR)A=12Brˆeθ
Así expresado en coordenadas cilíndricas los iguales de LagrangianosL=12m(˙r2+r2˙θ2+˙z2)+eϕ−12eBr2˙θ
Los momentos generalizados son
pr=∂L∂˙r=m˙rpθ=∂L∂˙θ=mr2˙θ−12eBr2pz=∂L∂˙z=m˙z
Tenga en cuenta que el potencial vectorialA contribuye con un término adicional al momento angularpθ.
El uso de los momentos generalizados anteriores lleva a la hamiltonianaH=pr˙r+pθ˙θ+pz˙z−L=12m(˙r2+r2˙θ2+˙z2)−eϕ+12eBr2˙θ=p2r2m+12mr2(pθ+12eBr2)2+p2z2m−eϕ=12m[p2r+(pθr+12eBr)2+p2z]−eϕ
Obsérvese que el hamiltoniano no es una función explícita del tiempo, por lo tanto es una constante de movimiento que equivale a la energía total. H=12m[p2r+(pθr+12eBr)2+p2z]−eϕ=E
Ya que˙pi=−∂H∂qi, y si noH es una función explícita deqi, entonces es˙pi=0, decir,pi es una constante de movimiento. Asípθ ypz son constantes de movimiento.
Considera las condiciones inicialesr=a,˙r=˙θ=˙z=0. Entoncespθ=∂L∂˙θ=mr2˙θ−12eBr2=−12eBa2pz=0H=12m[p2r+(pθr+12eBr)2+p2z]+eϕ0ln(rR)ln(aR)=eϕ0
Obsérvese que en ese momentor=R, viene dada por la última ecuación ya que el hamiltoniano equivale a una constanteeϕ0.pr Es decir, suponiendo quea<<R entonces
p2r=2meϕ0−(12eBR)2
Definir un campo magnético crítico mediante
Bc≡2R√2mϕ0e
entonces
(p2r)r=R=(B2c−B2)(12eR)2
Tenga en cuenta que siB<Bc entoncespr es real enr=R. Sin embargo, siB>Bc entoncespr es imaginario alr=R implicar que debe haber un radio de órbita máximor0 para el electrón donder0<R. Es decir, las trayectorias de electrones están confinadas espacialmente a órbitas cilíndricas coaxiales concéntricas con los campos electromagnéticos del magnetrón. Estas trayectorias electrónicas cerradas excitan las cavidades de microondas ubicadas en la pared cilíndrica externa cercana del ánodo.