
12.3: Marco de Referencia Giratorio




- Última actualización
- 30 oct 2022
- Guardar como PDF
( \newcommand{\kernel}{\mathrm{null}\,}\)
Considere un marco de referencia giratorio que se designará como el marco de doble cebado (giratorio) para diferenciarlo del marco cebado no giratorio (móvil), ya que ambos pueden estar experimentando aceleración de traslación en relación con el marco no cebado fijo inercial como se describe en la Figura12.2.1.
Derivadas de tiempo espacial en un marco de referencia giratorio, no traducible
Por simplicidad supongamos queRfix=Vfix=0, es decir, el marco de referencia imprimado es estacionario e idéntico al marco fijo fijo no cebado. El marco de doble cebado (giratorio) es un marco no inercial que gira con respecto al origen del marco imprimado fijo.
19.4.2CEl apéndice muestra que una rotación infinitesimaldθ alrededor de un eje de rotación instantáneo conduce a un desplazamiento infinitossimaldrR donde
drR=dθ×r′mov
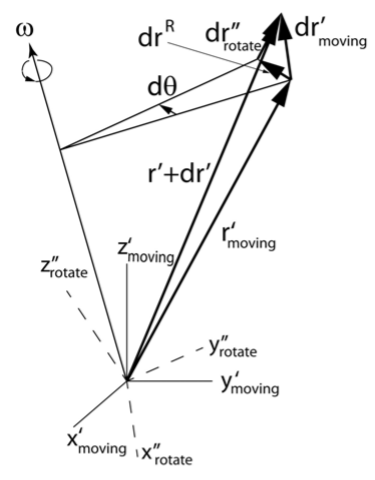
Considere que durante un tiempodt, el vector de posición en el marco de referencia cebado fijo se mueve por una distancia infinitossimal arbitrariadr′mov. Como se ilustra en la Figura12.3.1, esta distancia infinitossimal en el marco no giratorio imprimado se puede dividir en dos partes:
- drR=dθ×r′movque se debe a la rotación del bastidor giratorio con respecto al marco imprimado de traslación.
- (dr′′rot)que es el movimiento con respecto al marco giratorio (doble cebado).
Es decir, el movimiento se ha dividido arbitrariamente en una parte que se debe a la rotación del cuadro de doble cebado, más el desplazamiento vectorial medido en este cuadro giratorio (doble-cebado). Siempre es posible hacer tal descomposición del desplazamiento siempre y cuando la suma vectorial pueda escribirse como
dr′mov=dr′′rot+dθ×r′mov
Desdedθ=ωdt entonces el diferencial de tiempo del desplazamiento, Ecuación\ ref {12.8}, puede escribirse como
(dr′dt)mov=(dr′′dt)rot+ω×r′mov
La conclusión importante es que una velocidad medida en un marco de referencia no giratorio(dr′dt)mov puede expresarse como la suma de la velocidad(dr′′dt)rot, medida en relación con un marco giratorio, más el términoω×r′mov que da cuenta de la rotación del marco. La división deldr′rot vector en dos partes, una parte debida a la rotación del marco más una parte con respecto al marco giratorio, es válida para cualquier vector como se muestra a continuación.
Vector general en un marco de referencia giratorio, no traducible
Considere un vector arbitrarioG que puede expresarse en términos de componentes a lo largo de la base vectorial de tres unidadesˆefixi en el marco inercial fijo como
G=3∑i=1Gfixiˆefixi
Despreciando el movimiento de traslación, entonces se puede expresar en términos de los tres vectores unitarios en la base vectorial de unidad de trama giratoria no inercialˆeroti como
G=3∑i=1(Gi)rotˆeroti
Dado que los vectores de base unitariaˆeroti son constantes en el marco giratorio, es decir,
(dˆerotidt)rot=0
entonces las derivadas de tiempoG en el sistema de coordenadas giratorias seˆeroti pueden escribir como
(dGdt)rot=3∑i−1(dGidt)rotˆeroti
La derivada de tiempo de fotograma inercial tomada con componentes a lo largo de la base de coordenadas giratoriasˆeroti, Ecuación\ ref {12.11}, es
(dGdt)fix=3∑i−1(dGidt)rotˆeroti+(Gi)rotdˆerotidt
Sustituir el vector unitarioˆerot porr′mov en la Ecuación\ ref {12.9}, más usando la Ecuación\ ref {12.12}, da que
(dˆerotdt)fix=ω׈erot
Sustituir esto en el segundo término de la Ecuación\ ref {12.14} da
(dGdt)fix=(dGdt)rot+ω×G
Esta importante identidad relaciona las derivadas de tiempo de cualquier vector expresado tanto en el marco inercial como en las bases rotativas del marco no inercial. Obsérvese que elω×G término se origina a partir del hecho de que los vectores de base unitarios del marco de referencia giratorio dependen del tiempo con respecto a los vectores de base de trama no rotativos según lo dado por la Ecuación\ ref {12.15}. La ecuación\ ref {12.16} se usa ampliamente para problemas relacionados con marcos giratorios. Por ejemplo, para el caso especial dondeG=r′, entonces la Ecuación\ ref {12.16} relaciona los vectores de velocidad en los cuadros fijos y giratorios como se indica en la Ecuación\ ref {12.9}.
Otro ejemplo es el vector˙ω
˙ω=(dωdt)fix=(dωdt)rot+ω×ω=(dωdt)rot=˙ω
Es decir, la aceleración angular˙ω tiene el mismo valor tanto en los marcos fijos como giratorios de referencia.