
Epílogo
- Page ID
- 126199
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Este libro ha introducido poderosos métodos analíticos en física que se basan en aplicaciones de principios variacionales al Principio de Acción de Hamilton. Estos métodos fueron pioneros en la mecánica clásica por Leibniz, Lagrange, Euler, Hamilton y Jacobi, durante la notable Era de la Ilustración, y alcanzaron su plena fructificación a principios de\(20^{th}\) siglo.
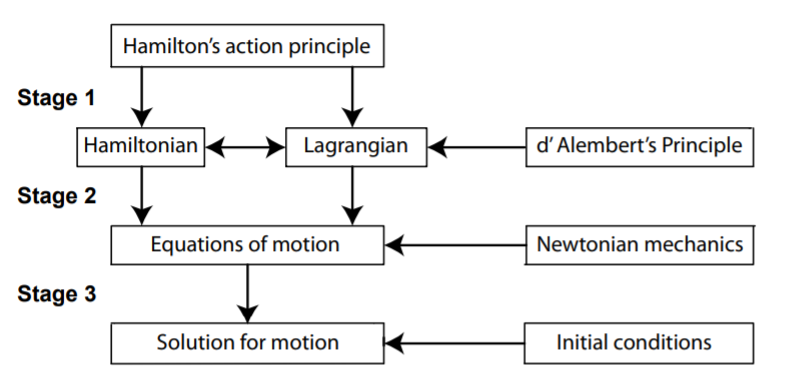
La hoja de ruta filosófica, mostrada anteriormente, ilustra la jerarquía de enfoques filosóficos disponibles cuando se utiliza el Principio de Acción de Hamilton para derivar las ecuaciones de movimiento de un sistema. El primario\(\mathbf{Stage1}\) utiliza la función Acción de Hamilton,\(S = \int^{t_f}_{t_i} L(\mathbf{q},\mathbf{\dot{q}},t)dt\) para derivar los funcionales lagrangianos y hamiltonianos. \(\mathbf{Stage1}\)proporciona el nivel de comprensión más fundamental y sofisticado e implica especificar todos los grados activos de libertad, así como las interacciones involucradas. \(\mathbf{Stage2}\)utiliza los funcionales lagrangianos o hamiltonianos, derivados en\(\mathbf{Stage1}\), con el fin de derivar las ecuaciones de movimiento para el sistema de interés. \(\mathbf{Stage3}\)luego usa las ecuaciones derivadas de movimiento para resolver el movimiento del sistema, sujeto a un conjunto dado de condiciones iniciales de contorno.
Newton postuló ecuaciones de movimiento para la mecánica clásica no relativista que son idénticas a las derivadas aplicando principios variacionales al Principio de Hamilton. Sin embargo, las Leyes del Movimiento de Newton son aplicables solo a la mecánica clásica no relativista, y no pueden explotar las ventajas de usar el Principio de Acción de Hamilton, el Lagrangiano y el Hamiltoniano, más fundamentales. La mecánica newtoniana requiere que todas las fuerzas activas se incluyan en las ecuaciones de movimiento, e implica tratar con cantidades vectoriales que es más difícil que usar los funcionales escalares, acción, lagrangianos o hamiltonianos. La mecánica lagrangiana basada en el Principio de d'Alembert no explota todas las ventajas proporcionadas por el Principio de Acción de Hamilton.
Considerables ventajas resultan de derivar las ecuaciones de movimiento basadas en el Principio de Hamilton, en lugar de basarlas en las Leyes del Movimiento postuladas de Newton. Es significativamente más fácil usar principios variacionales para manejar las funciones escalares, acción, lagrangiano y hamiltoniano, en lugar de comenzar con las ecuaciones diferenciales vectoriales de Newton de movimiento. Las tres etapas jerárquicas de la mecánica analítica facilitan acomodar grados adicionales de libertad, simetrías, restricciones y otras interacciones. Por ejemplo, las simetrías identificadas por el teorema de Noether se reconocen más fácilmente durante las etapas primaria de “acción” y secundaria “hamiltoniana/lagrangiana”, en lugar de en la etapa posterior de “ecuaciones de movimiento”. Las fuerzas de restricción, y las aproximaciones, introducidas en el\(\mathbf{Stage1}\) o\(\mathbf{Stage2}\), son más fáciles de implementar que en las posteriores\(\mathbf{Stage3}\). La correspondencia de la Acción de Hamilton en la mecánica clásica y cuántica, así como la invarianza relativista, son ventajas cruciales para usar el enfoque analítico en mecánica relativista, movimiento fluido, cuántica y teoría de campo.
Filosóficamente, la mecánica newtoniana es sencilla de entender ya que utiliza ecuaciones vectoriales diferenciales de movimiento que relacionan las fuerzas instantáneas con las aceleraciones instantáneas. Además, los conceptos de impulso más fuerza son intuitivos de visualizar, y tanto la causa como el efecto están incrustados en la mecánica newtoniana. Desafortunadamente, la mecánica newtoniana es incompatible con la física cuántica, viola los conceptos relativistas del espacio-tiempo y no proporciona la descripción unificada de la fuerza gravitacional más el movimiento planetario como movimiento geodésico en una estructura riemanniana de cuatro dimensiones.
Las notables implicaciones filosóficas incrustadas en la aplicación de principios variacionales al Principio de Hamilton, se basan en la asombrosa suposición de que el movimiento de un sistema restringido en la naturaleza sigue un camino que minimiza la integral de acción. Como consecuencia, la resolución de las ecuaciones de movimiento se reduce a encontrar el camino óptimo que minimiza la integral de acción. El hecho de que la naturaleza siga los principios de optimización no es intuitivo, y fue considerado metafísico por muchos científicos y filósofos durante el\(19^{th}\) siglo, lo que retrasó la aceptación plena de la mecánica analítica hasta el desarrollo de la Teoría de la Relatividad y la mecánica cuántica. Las formulaciones variacionales ahora se han convertido en el enfoque preeminente en la física moderna y han derribado a la mecánica newtoniana del trono de la mecánica clásica que ocupó durante dos siglos.
El alcance de este libro va más allá del típico libro de texto de mecánica clásica para ilustrar cómo la dinámica lagrangiana y hamiltoniana proporciona la base sobre la que se construye la física moderna. El conocimiento de la mecánica analítica es esencial para el estudio de la física moderna. Las técnicas y la física discutidas en este libro reaparecen en diferentes formas en muchos campos, pero la física básica no cambia ilustrando la belleza intelectual, las implicaciones filosóficas y la unidad del campo de la física. La amplitud de la física abordada por los principios variacionales en la mecánica clásica, y la unidad subyacente del campo, se personifican por la amplia gama de dimensiones, energías y complejidad involucradas. Las dimensiones van desde tan grandes como\(10^{27}\)\(m\), a análogos cuánticos de la mecánica clásica de sistemas que abarcan en tamaño hasta la longitud de Planck de\(1.62 \times 10^{−35} \)\(m\). Se han detectado partículas individuales con energías cinéticas que van de cero a mayores que\(10^{15}\) eV. La complejidad de la mecánica clásica abarca desde un cuerpo hasta la mecánica estadística de muchos sistemas corporales. Como consecuencia, los métodos variacionales analíticos se han convertido en el enfoque principal para describir sistemas desde los más grandes hasta los más pequeños, y desde sistemas dinámicos de un cuerpo a muchos cuerpos.
El objetivo de este libro ha sido ilustrar el asombroso poder de los métodos variacionales analíticos para comprender la física subyacente a la mecánica clásica, así como las extensiones de la física moderna. Sin embargo, la narrativa actual permanece inconclusa, ya que no se han abordado cuestiones filosóficas y técnicas fundamentales. Por ejemplo, la mecánica analítica se basa en la validez del principio asumido de economía. Este libro no ha abordado la cuestión filosófica, “¿es el principio de economía una ley fundamental de la naturaleza, o es una consecuencia fortuita de las leyes fundamentales de la naturaleza? ”
En resumen, el principio de acción de Hamilton, que está integrado en la mecánica lagrangiana y hamiltoniana, aunado a la disponibilidad de un amplio arsenal de principios variacionales y técnicas matemáticas, proporciona un enfoque notablemente poderoso para derivar las ecuaciones de movimientos requeridas para determinar la respuesta de sistemas en una amplia y diversa gama de aplicaciones en ciencia e ingeniería.