
15.21: Masa
- Page ID
- 130951

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Es bien sabido que “en la relatividad” la masa de un objeto aumenta a medida que aumenta su velocidad. Esto puede ser bien conocido, pero no estoy seguro de que se trate de una declaración muy precisa de la verdadera situación. O al menos no es más preciso que decir que la longitud de una varilla disminuye a medida que aumenta su velocidad. La longitud de una varilla cuando se refiere a un marco en el que está en reposo se llama su longitud adecuada\( l_{0}\), y la masa de un cuerpo cuando se refiere a un marco en el que está en reposo se llama su masa de reposo\( m_{0}\), y ambas cosas son invariantes. La longitud de una varilla cuando se refiere a un marco de referencia que se mueve con respecto a ella (es decir, en lenguaje Minkowski, su componente a lo largo de un eje inclinado) y la masa de un cuerpo referida a un marco que se mueve con respecto a ella puede ser diferente de la longitud adecuada de la varilla o la masa restante de el cuerpo.
Para derivar la contracción FitzGerald-Lorentz, tuvimos que pensar en qué nos referimos con “longitud” y cómo medirla. De igual manera, para derivar el “aumento relativista de masa” (que puede ser un nombre inapropiado) tenemos que pensar en lo que entendemos por masa y cómo medirlo.
La unidad fundamental de masa utilizada actualmente en la ciencia es el International Prototype Kilogram, una aleación de platino-iridio, que se encuentra en Sèvres, París, Francia. Para determinar la masa, o inercia, de otro cuerpo, necesitamos llevar a cabo un experimento para comparar su renuencia a acelerar cuando se le aplica una fuerza con la reluctancia del kilogramo estándar cuando se aplica la misma fuerza. Podríamos, por ejemplo, unir el cuerpo a un resorte, estirar el resorte, soltarlo y ver qué tan rápido acelera el cuerpo. Después realizamos el mismo experimento con el Kilogramo Internacional Prototipo. O podríamos aplicar un impulso (\( \int Idt\)- ver Capítulo 8) al cuerpo y al Kilogramo, y medir la velocidad inmediatamente después de aplicar el impulso. Esto podría hacerse, por ejemplo, pero golpeando el cuerpo y el Kilogramo con un palo de golf, o, para un experimento más controlado, uno podría presionar cada cuerpo contra un resorte comprimido, soltar el resorte y medir la velocidad resultante impartida al cuerpo y al Kilogramo. (Es probable que el Kilogramo Prototipo Internacional se mantenga bajo algún tipo de guardia, y sus curadores tal vez no aprecien del todo tales experimentos, así que quizás sea mejor que estos experimentos sigan siendo Experimentos de Pensamiento). Otro método más sería hacer que el cuerpo y el Kilogramo chocaran entre sí, y asumir que la colisión es elástica (sin grados internos de libertad) y que el impulso (definido como el producto de la masa y la velocidad) se conservan.
Todos estos experimentos miden la renuencia a acelerar bajo una fuerza; es decir, la inercia o la masa inercial o simplemente la masa del cuerpo.
Otro posible experimento para determinar la masa del cuerpo sería colocarlo y el Kilogramo a una distancia medida de otra masa (como la Tierra) y medir la fuerza gravitacional (peso) de cada uno. Uno tiene la sensación incómoda de que este tipo de medición es de alguna manera un poco diferente de las demás, en que no es una medida de inercia. Algunos de hecho diferenciarían entre la masa inercial y la masa gravitacional de un cuerpo, aunque de hecho se observa que las dos son estrictamente proporcionales entre sí. Algunos no encontrarían particularmente notable la proporcionalidad entre la masa inercial y la gravitacional; para otros, la proporcionalidad es un hecho sorprendente de la más profunda significación.
En este capítulo no nos ocupamos de la relatividad general ni de la gravedad, por lo que pensaremos en la masa en términos de su inercia. Voy a medir la relación de dos masas (una de las cuales podría ser el Kilogramo Prototipo Internacional) permitiéndoles colisionar, y sus masas deben definirse asumiendo que el impulso del sistema se conserva en todos los marcos de referencia que se mueven uniformemente.
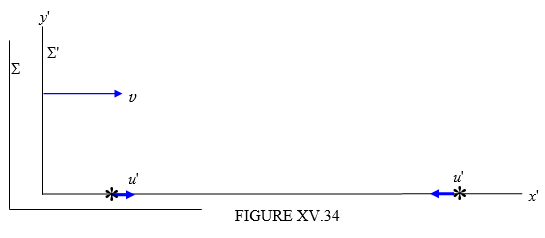
En la Figura XV.34 se muestran dos fotogramas de referencia\( \Sigma'\),\( \Sigma\) y este último moviéndose hacia la derecha a velocidad\( v\) relativa al primero. Dos cuerpos, de masas idénticas en\( \Sigma'\) (es decir, referidos al cuadro\( \Sigma'\)), se mueven a velocidad\( u'\) adentro\( \Sigma'\), uno de ellos a la derecha y el otro a la izquierda. Su centro de masa mutuo es estacionario en\( \Sigma'\).
Ahora vamos a referir la situación al marco\( \Sigma\) (ver figura XV.35).
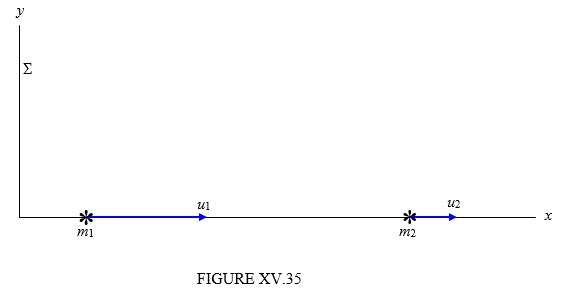
El impulso total del sistema en\( \Sigma\) es\( m_{1}u_{1}+m_{2}u_{2}\). Pero el centro de masa (que está estacionario en\( \Sigma'\)) se mueve hacia la derecha adentro\( \Sigma\) con velocidad\( v\). Por lo tanto, el impulso también lo es\( (m_{1}+m_{2})v\). Si se mantienen unidos al colisionar, nos quedamos con una sola partícula de masa\( m_{1}+m_{2}\) moviéndose a velocidad\( v\), y, debido a que no hay fuerzas externas, se conserva el impulso. En cualquier caso, ya sea elástica o no la colisión, tenemos
\[ m_{1}u_{1}+m_{2}u_{2}=(m_{1}+m_{2}). \label{15.21.1} \]
Pero
\[ u_{1}=\frac{u'+v}{1+\frac{u'v}{c^{2}}} \label{15.21.2a}\tag{15.21.2a} \]
y
\[ u_{2}=\frac{-u'+v}{1-\frac{u'v}{c^{2}}} \label{15.21.2b}\tag{15.21.2b} \]
Nuestro objetivo es tratar de encontrar una relación entre las masas y velocidades referidas\( \Sigma\). Por lo tanto debemos eliminar\( v\) y\( u'\) de Ecuaciones\( \ref{15.21.1}\),\( \ref{15.21.2a}\) y\( \ref{15.21.2b}\). Esto puede ser un poco complicado, pero el álgebra es sencillo, y le dejo al lector demostrar que el resultado es
\[ \frac{m_{1}}{m_{2}}=\sqrt{\frac{1-\frac{u_{2}^{2}}{c^{2}}}{1-\frac{u_{1}^{2}}{c^{2}}}} \label{15.21.3} \]
Esto nos dice que la masa\( m\) de un cuerpo al que se hace referencia\( \Sigma\) es proporcional a\( \frac{1}{\sqrt{1-\frac{u^{2}}{c^{2}}}}\), donde\( u\) se hace referencia a su velocidad\( \Sigma\). Si llamamos a la constante de proporcionalidad\( m_{0}\), entonces
\[ m=\frac{m_{0}}{\sqrt{1-\frac{u^{2}}{c^{2}}}} \label{15.21.4} \]
Si\( u=0\), entonces\( m=m_{0}\), y\( m_{0}\) se llama la masa de reposo, y es la masa cuando se refiere a un marco en el que el cuerpo está en reposo. La masa generalmente\( m\) se llama la masa relativista, y es la masa cuando se refiere a un marco en el que se encuentra la velocidad del cuerpo\( u\).
La ecuación\( \ref{15.21.4}\) da la masa referida\( \Sigma\) asumiendo que la masa está en reposo en\( \Sigma'\). Pero, ¿y si la misa no está en reposo en\( \Sigma'\)?
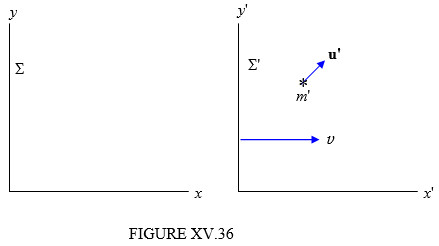
En la figura XV.36 vemos una masa\( m'\) moving with velocity \( \bf{u'}\) in \( \Sigma'\). Referred to \( \Sigma\) its mass will be \( m\), where
\[ \frac{m}{m'}=\sqrt{\frac{1-\frac{u'^{2}}{c^{2}}}{1-\frac{u^{2}}{c^{2}}}}. \label{15.21.5} \]
Its velocity \( \bf{u}\) will be in a different direction (referred to \( \Sigma\)) from the direction of \( \bf{u'}\) in \( \Sigma'\), and the speed will be given by
\[ u^{2}=u_{x}^{2}+u_{y}^{2} \label{15.21.6} \]
where \( u_{x}\) and \( u_{y}\) are given by Equations 15.16.2 and 15.16.3. Substitute Equations \( \ref{15.21.6}\), 15.16.2 and 15.16.3 into Equation \( \ref{15.21.5}\). The objective is to replace \( u\) entirely by primed quantities. The algebra is slightly boring, but it is worth persisting. You will find that \( u'^{2}_{y'}\) appears when you use Equation 15.16.3. Replace that by \( u'^{2}-u_{x'}'^{2}\). Also write \( \frac{1}{\left(1-\frac{v^{2}}{c^{2}}\right)}\) for \( \gamma^{2}\). After a little while you should arrive at
\[ \frac{m}{m'}=\gamma\left(1+\frac{vu'_{x'}}{c^{2}}\right). \label{15.21.7} \]
The transformation for mass between the two frames depends only on the \( x'\) component of its velocity in \( \Sigma'\). It would have made no difference, other than to increase the tedium of the algebra, if I had added \( +u_{z}^{2}\) to the right hand side of Equation \( \ref{15.21.6}\).
The inverse of Equation \( \ref{15.21.7}\) is found in the usual way by interchanging the primed and unprimed quantities and changing the sign of \( v\):
\[ \frac{m'}{m}=\gamma\left(1-\frac{vu_{x}}{c^{2}}\right). \label{15.21.8} \]
Example.
Let’s return to the problem of the dachshund that we met in Section 15.16. A railway train \( \Sigma'\) is trundling along at a speed \( \frac{v}{c}\) = 0.9 (\( \gamma\) = 2.294). The dachshund is waddling towards the front of the train at a speed \( \frac{u'_{x'}}{c}\). In the reference frame of the train \( \Sigma'\) the mass of the dog is \( m'\) = 8 kg. In the reference frame of the railway station, the mass of the dog is given by Equation \( \ref{15.21.7}\) and is 31.6 kg. (Its length is also much compressed, so it is very dense when referred to \( \Sigma\) and is disc-shaped.)
I leave it to the reader to show that the rest mass of the dog is 4.8 kg.