
5: Agrimensura y GPS




- Última actualización
- 30 oct 2022
- Guardar como PDF

\newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}}
\newcommand{\id}{\mathrm{id}} \newcommand{\Span}{\mathrm{span}}
( \newcommand{\kernel}{\mathrm{null}\,}\) \newcommand{\range}{\mathrm{range}\,}
\newcommand{\RealPart}{\mathrm{Re}} \newcommand{\ImaginaryPart}{\mathrm{Im}}
\newcommand{\Argument}{\mathrm{Arg}} \newcommand{\norm}[1]{\| #1 \|}
\newcommand{\inner}[2]{\langle #1, #2 \rangle}
\newcommand{\Span}{\mathrm{span}}
\newcommand{\id}{\mathrm{id}}
\newcommand{\Span}{\mathrm{span}}
\newcommand{\kernel}{\mathrm{null}\,}
\newcommand{\range}{\mathrm{range}\,}
\newcommand{\RealPart}{\mathrm{Re}}
\newcommand{\ImaginaryPart}{\mathrm{Im}}
\newcommand{\Argument}{\mathrm{Arg}}
\newcommand{\norm}[1]{\| #1 \|}
\newcommand{\inner}[2]{\langle #1, #2 \rangle}
\newcommand{\Span}{\mathrm{span}} \newcommand{\AA}{\unicode[.8,0]{x212B}}
\newcommand{\vectorA}[1]{\vec{#1}} % arrow
\newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow
\newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vectorC}[1]{\textbf{#1}}
\newcommand{\vectorD}[1]{\overrightarrow{#1}}
\newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}}
\newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}}
\newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} }
\newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}}
\newcommand{\avec}{\mathbf a} \newcommand{\bvec}{\mathbf b} \newcommand{\cvec}{\mathbf c} \newcommand{\dvec}{\mathbf d} \newcommand{\dtil}{\widetilde{\mathbf d}} \newcommand{\evec}{\mathbf e} \newcommand{\fvec}{\mathbf f} \newcommand{\nvec}{\mathbf n} \newcommand{\pvec}{\mathbf p} \newcommand{\qvec}{\mathbf q} \newcommand{\svec}{\mathbf s} \newcommand{\tvec}{\mathbf t} \newcommand{\uvec}{\mathbf u} \newcommand{\vvec}{\mathbf v} \newcommand{\wvec}{\mathbf w} \newcommand{\xvec}{\mathbf x} \newcommand{\yvec}{\mathbf y} \newcommand{\zvec}{\mathbf z} \newcommand{\rvec}{\mathbf r} \newcommand{\mvec}{\mathbf m} \newcommand{\zerovec}{\mathbf 0} \newcommand{\onevec}{\mathbf 1} \newcommand{\real}{\mathbb R} \newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]} \newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]} \newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]} \newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]} \newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]} \newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]} \newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]} \newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]} \newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]} \newcommand{\laspan}[1]{\text{Span}\{#1\}} \newcommand{\bcal}{\cal B} \newcommand{\ccal}{\cal C} \newcommand{\scal}{\cal S} \newcommand{\wcal}{\cal W} \newcommand{\ecal}{\cal E} \newcommand{\coords}[2]{\left\{#1\right\}_{#2}} \newcommand{\gray}[1]{\color{gray}{#1}} \newcommand{\lgray}[1]{\color{lightgray}{#1}} \newcommand{\rank}{\operatorname{rank}} \newcommand{\row}{\text{Row}} \newcommand{\col}{\text{Col}} \renewcommand{\row}{\text{Row}} \newcommand{\nul}{\text{Nul}} \newcommand{\var}{\text{Var}} \newcommand{\corr}{\text{corr}} \newcommand{\len}[1]{\left|#1\right|} \newcommand{\bbar}{\overline{\bvec}} \newcommand{\bhat}{\widehat{\bvec}} \newcommand{\bperp}{\bvec^\perp} \newcommand{\xhat}{\widehat{\xvec}} \newcommand{\vhat}{\widehat{\vvec}} \newcommand{\uhat}{\widehat{\uvec}} \newcommand{\what}{\widehat{\wvec}} \newcommand{\Sighat}{\widehat{\Sigma}} \newcommand{\lt}{<} \newcommand{\gt}{>} \newcommand{\amp}{&} \definecolor{fillinmathshade}{gray}{0.9}Agrimensura y GPS
David DiBiase
5.1. Visión general
Como recuerda del Capítulo 1, los datos geográficos representan ubicaciones espaciales y atributos no espaciales medidos en ciertos momentos. Definimos “feature” como un conjunto de posiciones que especifica la ubicación y extensión de una entidad. Las posiciones, entonces, son un elemento fundamental de los datos geográficos. Al igual que las letras que componen estas palabras, las posiciones son los bloques de construcción a partir de los cuales se construyen las características. Un límite de propiedad, por ejemplo, se compone de un conjunto de posiciones conectadas por segmentos de línea.
En teoría, una sola posición es una característica “0-dimensional”: un punto infinitesimalmente pequeño a partir del cual se forman las características unidimensionales, bidimensionales y tridimensionales (líneas, áreas y volúmenes). En la práctica, las posiciones ocupan áreas bidimensionales o tridimensionales como resultado de la resolución limitada de las tecnologías de medición y la precisión limitada de las coordenadas de ubicación. La resolución y la precisión son dos aspectos de la calidad de los datos. Este capítulo explora las tecnologías y procedimientos utilizados para producir datos posicionales, y los factores que determinan su calidad.
Objetivos
Los alumnos que completen exitosamente el Capítulo 5 deberán ser capaces de:
- Identificar y definir los aspectos clave de la calidad de los datos, incluida la resolución, precisión y precisión;
- Enumerar y explicar los procedimientos que utilizan los agrimensores para producir datos posicionales, incluyendo el desplazamiento, la triangulación y la trilateración;
- Calcular las coordenadas del plano por recorrido abierto;
- Calcular elevaciones por nivelación;
- Explicar cómo se utilizan las señales de radio emitidas por los satélites del Sistema de Posicionamiento Global para calcular las posiciones en la superficie de la Tierra;
- Indicar los tipos y magnitud de error asociados con el posicionamiento GPS no corregido; y
- Identificar y explicar los métodos utilizados para mejorar la precisión del posicionamiento GPS.
Comentarios y preguntas
Los estudiantes registrados son bienvenidos a publicar comentarios, preguntas y respuestas a preguntas sobre el texto. Particularmente bienvenidos son las anécdotas que relacionan el texto del capítulo con su experiencia personal o profesional. Además, hay foros de discusión disponibles en el sistema de gestión de cursos ANGEL para comentarios y preguntas sobre temas que quizás no desees compartir con todo el mundo.
Para publicar un comentario, desplácese hacia abajo hasta el cuadro de texto debajo de “Publicar nuevo comentario” y comience a escribir en el cuadro de texto, o puede optar por responder a un hilo existente. Cuando termine de escribir, haga clic en el botón “Vista previa” o “Guardar” (Guardar realmente presentará su comentario). Una vez publicado tu comentario, podrás editarlo o eliminarlo según sea necesario. Además, podrás responder a otras publicaciones en cualquier momento.
Nota: las primeras palabras de cada comentario se convierten en su “título” en el hilo.
5.2. Lista de comprobación
La siguiente lista de verificación es para estudiantes de Penn State que están registrados para clases en las que se les ha asignado este texto, así como cuestionarios y proyectos asociados en el sistema de gestión de cursos ANGEL. Puede resultarle útil imprimir primero esta página para que pueda seguir las instrucciones.
| Paso | Actividad | Acceso/Direcciones |
|---|---|---|
| 1 | Leer Capítulo 5 | Esta es la segunda página del Capítulo. Haga clic en los enlaces en la parte inferior de la página para continuar o para volver a la página anterior, o para ir a la parte superior del capítulo. También puedes navegar por el texto a través de los enlaces del menú del GEOG 482 de la izquierda. |
| 2 | Presentar cinco cuestionarios de práctica que incluyen:
Los cuestionarios de práctica no se califican y pueden presentarse más de una vez. | Ir a ANGEL > [la sección de tu curso] > Pestaña Lecciones > Carpeta Capítulo 5 > [quiz] |
| 3 | Realiza actividades de “Prueba esto” que incluyen:
Las actividades de “Prueba esto” no están calificadas. | Se proporcionan instrucciones para cada actividad. |
| 4 | Enviar el Cuestionario Calificado del Capítulo 5 | ANGEL > [la sección de tu curso] > Pestaña Lecciones > Carpeta Capítulo 5 > Capítulo 5 Cuestionario Calificado. Consulte la pestaña Calendario en ANGEL para conocer las fechas de vencimiento. |
| 5 | Leer comentarios y preguntas publicadas por compañeros de estudios. Agrega comentarios y preguntas propias, si las hubiere. | Los comentarios y preguntas pueden ser publicados en cualquier página del texto, o en un foro de discusión específico del Capítulo en ANGEL. |
5.3. Calidad de datos geoespaciales
La calidad es una característica de cosas comparables que nos permite decidir que una cosa es mejor que otra. En el contexto de los datos geográficos, el último estándar de calidad es el grado en que un conjunto de datos es apto para su uso en una aplicación particular. A esa norma se le llama validez. El estándar varía de una aplicación a otra. En general, sin embargo, los criterios clave son cuánto error está presente en un conjunto de datos, y cuánto error es aceptable.
Algún grado de error siempre está presente en los tres componentes de los datos geográficos: características, atributos y tiempo. Los datos perfectos describirían completamente la ubicación, extensión y características de los fenómenos exactamente como ocurren en cada momento. Al igual que el proverbial mapa a escala 1:1, sin embargo, los datos perfectos serían demasiado grandes y demasiado detallados para ser de cualquier uso práctico. ¡Por no hablar de lo increíblemente caro de crear en primer lugar!
5.4. Error e incertidumbre
Las posiciones son el producto de las mediciones. Todas las mediciones contienen cierto grado de error. Se introducen errores en el acto original de medir ubicaciones en la superficie terrestre. También se introducen errores cuando se producen datos de segunda y tercera generación, por ejemplo, escaneando o digitalizando un mapa en papel.
En general, existen tres fuentes de error en la medición: los seres humanos, el entorno en el que trabajan y los instrumentos de medición que utilizan.
Los errores humanos incluyen errores, como leer un instrumento incorrectamente, y juicios. El juicio se convierte en un factor cuando el fenómeno que se está midiendo no es directamente observable (como un acuífero), o tiene límites ambiguos (como una unidad de suelo).
Las características ambientales, como las variaciones de temperatura, gravedad y declinación magnética, también resultan en errores de medición.
Los errores del instrumento se derivan del hecho de que el espacio es continuo. No hay límite para la precisión con la que se puede especificar una posición. Las mediciones, sin embargo, solo pueden ser tan precisas. No importa qué instrumento, siempre hay un límite de cuán pequeña es detectable una diferencia. Ese límite se llama resolución.
El siguiente diagrama muestra la misma posición (el punto en el centro de la diana) medida por dos instrumentos. Los dos patrones de cuadrícula representan los objetos más pequeños que pueden ser detectados por los instrumentos. El patrón a la izquierda representa un instrumento de mayor resolución.
Resolución.
La resolución de un instrumento afecta la precisión de las mediciones tomadas con él. En la siguiente ilustración, la medición a la izquierda, que se tomó con el instrumento de mayor resolución, es más precisa que la medición a la derecha. En forma digital, la medición más precisa se representaría con decimales adicionales. Por ejemplo, una posición especificada con la UTM coordina 500,000. metros Este y 5,000,000. metros Norte es en realidad un área de 1 metro cuadrado. Una especificación más precisa sería de 500,000.001 metros Este y 5,000.000.001 metros Norte, lo que ubica la posición dentro de un área de 1 milímetro cuadrado. Se puede pensar en el área como una zona de incertidumbre dentro de la cual, en algún lugar, existe la ubicación teóricamente infinitesimal del punto. La incertidumbre es inherente a los datos geoespaciales.
La precisión de una sola medición.
La precisión adquiere un significado ligeramente diferente cuando se usa para referirse a una serie de mediciones repetidas. En la siguiente ilustración, hay menos varianza entre las nueve mediciones a la izquierda que entre las nueve medidas a la derecha. Se dice que el conjunto de medidas a la izquierda es más preciso.
La precisión de múltiples mediciones.
Ojalá hayas notado que la resolución y la precisión son independientes de la precisión. Como se muestra a continuación, la precisión simplemente significa qué tan cerca corresponde una medición a un valor real.
Precisión.
Mencioné el Estándar de Precisión de Mapa Nacional del Servicio Geológico de Estados Unidos en el Capítulo 2. En cuanto a los mapas topográficos, la Norma garantiza que el 90 por ciento de los puntos bien definidos probados estarán dentro de una cierta tolerancia de sus posiciones reales. Otra forma de especificar la precisión de una base de datos espacial completa es calcular la diferencia promedio entre muchas posiciones medidas y posiciones reales. El estadístico se denomina error cuadrático medio (RMSE) de un conjunto de datos.
5.5. Errores sistemáticos frente a errores aleatorios
El siguiente diagrama ilustra la distinción entre errores sistemáticos y aleatorios. Los errores sistemáticos tienden a ser consistentes en magnitud y/o dirección. Si se conoce la magnitud y dirección del error, la precisión se puede mejorar mediante correcciones aditivas o proporcionales. La corrección aditiva implica sumar o restar un factor de ajuste constante a cada medición; la corrección proporcional implica multiplicar la (s) medición (es) por una constante.
A diferencia de los errores sistemáticos, los errores aleatorios varían en magnitud y dirección. Sin embargo, es posible calcular el promedio de un conjunto de posiciones medidas y es probable que ese promedio sea más preciso que la mayoría de las mediciones.
Errores sistemáticos y aleatorios.
En las secciones que siguen comparamos la precisión y fuentes de error de dos importantes tecnologías de posicionamiento: la topografía y el Sistema de Posicionamiento Global.
5.6. Control de encuestas
Las posiciones geográficas se especifican en relación con una referencia fija. Las posiciones en el globo, por ejemplo, pueden especificarse en términos de ángulos relativos al centro de la Tierra, el ecuador y el meridiano principal. Las posiciones en las cuadrículas de coordenadas planas se especifican como distancias desde el origen del sistema de coordenadas. Las elevaciones se expresan como distancias por encima o por debajo de un dato vertical como el nivel medio del mar, o un elipsoide como GRS 80 o WGS 84, o un geoide.
Los agrimensores miden posiciones horizontales en sistemas de coordenadas geográficas o planas en relación con posiciones previamente encuestadas llamadas puntos de control. En Estados Unidos, el Servicio Nacional Geodésico (NGS) mantiene un Sistema Nacional de Referencia Espacial (NSRS) que consta de aproximadamente 300,000 estaciones de control horizontales y 600,000 verticales (Doyle, 1994). Las coordenadas asociadas con los puntos de control horizontales se refieren al NAD 83; las elevaciones son relativas a NAVD 88. En una actividad del Capítulo 2 es posible que haya recuperado una de las hojas de datos que NGS mantiene para cada punto de control del NSRS, junto con más de un millón de otros puntos presentados por topógrafos profesionales.
Benchmark utilizado para marcar un punto de control vertical. (Thompson, 1988).
En 1988 NGS estableció cuatro órdenes de precisión de puntos de control, los cuales se describen en la siguiente tabla. La precisión mínima para cada orden se expresa en relación a la distancia horizontal que separa dos puntos de control del mismo orden. Por ejemplo, si inicia en un punto de control del orden AA y mide una distancia de 500 km, la longitud de la línea debe ser precisa dentro de un error de base de 3 mm, más o menos un error de longitud de línea de 5 mm (500,000,000 mm × 0.01 partes por millón).
| Orden | Actividades de encuestas | Error de base máximo (límite de confianza del 95%) | Error máximo dependiente de la longitud de línea (límite de confianza del 95%) |
|---|---|---|---|
| AA | Dinámica global-regional; mediciones de deformación | 3 mm | 1:100 ,000,000 (0.01 ppm) |
| A | Redes primarias NSRS | 5 mm | 1:10 ,000,000 (0.1 ppm) |
| B | Redes secundarias NSRS; estudios de ingeniería de alta precisión | 8 mm | 1:1 ,000,000 (1 ppm) |
| C | NSRS terrestre; estudios de control dependiente para mapeo, información de tierras, propiedad y requisitos de ingeniería | 1°: 1.0 cm 2nd-I: 2.0 cm 2nd-II: 3.0 cm 3er: 5.0 cm | 1°: 1:100 ,000 2nd-I: 1:50 ,000 2nd-II: 1:20 ,000 3ro: 1:10 ,000 |
Estándares de precisión de red de control utilizados para el Sistema Nacional de Referencia Espacial de Estados Unidos (Comité Federal de Control Geodésico, 1988).
Doyle (1994) señala que los sistemas de referencia horizontales y verticales coinciden en menos del diez por ciento. Esto se debe a que
... estaciones horizontales a menudo se ubicaban en altas montañas o colinas para disminuir la necesidad de construir torres de observación que generalmente se requerían para proporcionar una línea de visión para las mediciones de triangulación, recorrido y trilateración. Sin embargo, los puntos de control verticales se establecieron mediante la técnica de nivelación de alcohol que es más adecuada para ser conducida a lo largo de pendientes graduales como carreteras y ferrocarriles que rara vez escalan cimas de las montañas. (Doyle, 2002, p. 1)
Quizás te preguntes cómo se inicia una red de control. Si las posiciones se miden en relación con otras posiciones, ¿a qué se mide la primera posición en relación? La respuesta es: las estrellas. Antes de que se dispusieran de relojes confiables, los astrónomos solo podían determinar la longitud mediante la observación cuidadosa de eventos celestes recurrentes, como los eclipses de las lunas de Júpiter. Hoy en día, los geodésicos producen datos posicionales extremadamente precisos mediante el análisis de ondas de radio emitidas por estrellas distantes. Sin embargo, una vez que se establece una red de control, los topógrafos producen posiciones utilizando instrumentos que miden ángulos y distancias entre ubicaciones en la superficie de la Tierra.
6.7. Ángulos de medición
Los ángulos se pueden medir con una brújula magnética, por supuesto. Desafortunadamente, el campo magnético de la Tierra no produce las mediciones más confiables. Los polos magnéticos no están alineados con el eje de rotación del planeta (un efecto llamado declinación magnética), y tienden a cambiar de ubicación con el tiempo. Las anomalías magnéticas locales causadas por rocas magnetizadas en la corteza terrestre y otros campos geomagnéticos empeoran las cosas.
Por estas razones, los agrimensores se basan en tránsitos (o sus equivalentes más modernos, llamados teodolitos) para medir ángulos. Un tránsito consiste en un telescopio para ubicar objetos objetivo distantes, dos ruedas de medición que funcionan como transportadores para leer ángulos horizontales y verticales, y niveles de burbuja para asegurar que los ángulos sean verdaderos. Un teodolito es esencialmente el mismo instrumento, excepto que algunas partes mecánicas son reemplazadas por electrónica.
Tránsito. (Raisz, 1948). Usado con permiso.
Los topógrafos expresan ángulos de varias maneras. Al especificar direcciones, como se hace en la preparación de un levantamiento de propiedades, los ángulos pueden especificarse como cojinetes o azimutos. Un rumbo es un ángulo inferior a 90° dentro de un cuadrante definido por las direcciones cardinales. Un acimut es un ángulo entre 0° y 360° medido en el sentido de las agujas del reloj desde el Norte. “Sur 45° Este” y “135°” son la misma dirección expresada como rumbo y como acimut. Un ángulo interior, por el contrario, es un ángulo medido entre dos líneas de visión, o entre dos patas de un travesaño (descrito más adelante en este capítulo).
Azimutos y cojinetes.
En Estados Unidos, organizaciones profesionales como el Congreso Americano de Topografía y Mapeo, la American Land Title Association, la National Society of Professional Surveyors y otras, recomiendan estándares mínimos de precisión para las mediciones de ángulo y distancia. Por ejemplo, como señala Steve Henderson (comunicación personal, Otoño 2000, actualizado en julio de 2010), la Alabama Society of Professional Land Surveyors recomienda que los errores en las mediciones de ángulo en las encuestas “comerciales/de alto riesgo” no sean mayores de 15 segundos por la raíz cuadrada del número de ángulos medidos.
Para lograr este nivel de precisión, los topógrafos deben superar los errores causados por una calibración defectuosa del instrumento; viento, temperatura y suelo blando; y errores humanos, incluyendo extraviar el instrumento y malinterpretar las ruedas de medición. En la práctica, los topógrafos producen datos precisos tomando mediciones repetidas y promediando los resultados.
8. Medir distancias
Para medir distancias, los agrimensores utilizaron una vez cintas metálicas de 100 pies de largo que se gradúan en centésimas de pie. (Esta es la técnica que aprendí como estudiante en una clase de topografía en la Universidad de Wisconsin a principios de la década de 1980. La imagen que se muestra a continuación es ligeramente anterior.) Las distancias a lo largo de pendientes se miden en segmentos horizontales cortos. Los topógrafos calificados pueden lograr precisiones de hasta una parte en 10,000 (error de 1 centímetro por cada 100 metros de distancia). Las fuentes de error incluyen fallas en la cinta misma, como torceduras; variaciones en la longitud de la cinta debido a temperaturas extremas; y errores humanos como tracción inconsistente, permitiendo que la cinta se desvíe del plano horizontal y lecturas incorrectas.

Equipo de topografía midiendo una distancia basal con una cinta metálica (Invar). (Hodgson, 1916).
Desde la década de 1980, los dispositivos electrónicos de medición de distancia (EDM) han permitido a los topógrafos medir distancias de manera más precisa y eficiente que con cintas. Para medir la distancia horizontal entre dos puntos, un topógrafo utiliza un instrumento EDM para disparar una onda de energía hacia un reflector sostenido por el segundo topógrafo. El EDM registra el tiempo transcurrido entre la emisión de la onda y su retorno desde el reflector. Luego calcula la distancia en función del tiempo transcurrido. Los EDM típicos de corto alcance se pueden utilizar para medir distancias de hasta 5 kilómetros con precisiones de hasta una parte en 20,000, dos veces más precisas que las cintas.

Estación total.
Los instrumentos llamados estaciones totales combinan la medición electrónica de distancia y las capacidades de medición del ángulo de los teodolitos en una sola unidad. A continuación consideramos cómo se utilizan estos instrumentos para medir las posiciones horizontales en relación con las redes de control establecidas.
5.9. Posiciones Horizontales
Los topógrafos han desarrollado distintos métodos, basados en redes de control separadas, para medir posiciones horizontales y verticales. En este contexto, una posición horizontal es la ubicación de un punto relativo a dos ejes: el ecuador y el meridiano principal en el globo, o los ejes x e y en un sistema de coordenadas planas. Los puntos de control vinculan los sistemas de coordenadas a ubicaciones reales en el suelo; son las manifestaciones físicas de los datums horizontales. En las siguientes páginas revisamos dos técnicas que utilizan los topógrafos para crear y extender redes de control (triangulación y trilateración) y otras dos técnicas utilizadas para medir posiciones relativas a puntos de control (travesías abiertas y cerradas).
5.10. Traverse
Los topógrafos suelen medir posiciones en serie. Comenzando en los puntos de control, miden ángulos y distancias a nuevas ubicaciones, y utilizan la trigonometría para calcular posiciones en un sistema de coordenadas de plano. Medir una serie de posiciones de esta manera se conoce como “correr una travesa”. Un recorrido transversal que comienza y termina en diferentes ubicaciones se denomina polipasto abierto.
Un recorrido abierto. (Adaptado de Robinson, et al., 1995)
Por ejemplo, digamos que las coordenadas UTM del punto A en la ilustración anterior son 500,000.00 E y 5,000,000.00 N. La distancia entre los puntos A y P, medida con una cinta de acero o una electroerosión, es de 2,828.40 metros. El acimut de la línea AP, medido con un tránsito o teodolito, es de 45º. Usando estas dos mediciones, las coordenadas UTM del punto P se pueden calcular de la siguiente manera:
XP = 500,000.00 + (2,828.40 × sin 45) = 501,999.98
YP = 5,000,000.00 + (2,828.40 × cos 45°) = 5,001,999.98
Un recorrido transversal que comienza y termina en el mismo punto, o en dos puntos diferentes pero conocidos, se denomina transversal cerrado. Los errores de medición en una poligonal cerrada se pueden cuantificar sumando los ángulos interiores del polígono formado por la poligonal. No se puede conocer la precisión de una sola medición de ángulo, pero como la suma de los ángulos interiores de un polígono es siempre (n-2) × 180, es posible evaluar el recorrido en su conjunto y distribuir los errores acumulados entre todos los ángulos interiores.
Los errores producidos en una poligonal abierta, aquella que no termina donde comenzó, no pueden ser evaluados ni corregidos. La única manera de evaluar la precisión de un recorrido abierto es medir distancias y ángulos repetidamente, hacia adelante y hacia atrás, y promediar los resultados de los cálculos. Debido a que las mediciones repetidas son costosas, se prefieren otras técnicas de topografía que permiten a los topógrafos calcular y explicar el error de medición sobre los recorridos abiertos para la mayoría de las aplicaciones.
5.11. Triangulación
Los recorridos cerrados producen una precisión adecuada para los levantamientos de límites de propiedad, siempre que un punto de control establecido esté cerca. Los topógrafos realizan encuestas de control para extender y densificar las redes de control horizontales. Antes de que estuviera disponible el posicionamiento satelital de grado topográfico, la técnica más común para realizar encuestas de control fue la triangulación.
El propósito de una encuesta de control es establecer nuevos puntos de control horizontales (B, C y D) basados en un punto de control existente (A).
Usando una estación total equipada con un dispositivo electrónico de medición de distancia, el equipo de levantamiento de control comienza midiendo el azimut alfa y la distancia base AB. Estas dos mediciones permiten al equipo de levantamiento calcular la posición B como en un recorrido abierto. Antes de que el GPS de grado geodésico estuviera disponible, la precisión de la posición calculada B pudo haber sido evaluada por observación astronómica.
Establecer un segundo punto de control (B) en una red de triangulación.
A continuación, los topógrafos miden los ángulos interiores CAB, ABC y BCA en los puntos A, B y C. Conociendo los ángulos interiores y la longitud basal, la “ley de los senos” trigonométrica se puede usar para calcular las longitudes de cualquier otro lado. Conociendo estas dimensiones, los topógrafos pueden fijar la posición del punto C.
Establecer la posición del punto C por triangulación.
Habiendo medido tres ángulos interiores y la longitud de un lado del triángulo ABC, el equipo de levantamiento de control puede calcular la longitud del lado BC. Esta longitud calculada sirve entonces como línea base para el triángulo BDC. La triangulación se utiliza así para extender las redes de control, punto por punto y triángulo por triángulo.
Ampliar la red de triangulación.
5.12. Trilateración
La trilateración es una alternativa a la triangulación que se basa únicamente en mediciones de distancia. Las tecnologías electrónicas de medición de distancia hacen de la trilateración una técnica de posicionamiento rentable para encuestas de control. No solo es utilizado por agrimensores, también se utiliza la trilateración para determinar las coordenadas de ubicación con satélites y receptores del Sistema de Posicionamiento Global.
La trilateración se utiliza para extender las redes de control estableciendo nuevos puntos de control (B, C y D) basados en los puntos de control existentes (A).
Las redes de trilateración comienzan de la misma manera que las redes de triangulación. Si solo hay disponible un punto de control existente, se establece un segundo punto (B) mediante polipasto abierto. Utilizando una estación total equipada con un dispositivo electrónico de medición de distancia, el equipo de levantamiento mide el acimut α y la distancia base AB. El operador total de la estación puede colocar su instrumento sobre el punto A, mientras que su asistente sostiene un reflector montado en un poste a la altura del hombro tan constantemente como pueda sobre el punto B. Dependiendo de los requisitos de la encuesta de control, la precisión de la posición calculada B puede ser confirmada por observación astronómica.
Establecer un segundo punto de control (B) en una red de trilateración.
A continuación, el equipo de levantamiento utiliza la función electrónica de medición de distancia de la estación total para medir las distancias AC y BC. Se toman medidas tanto hacia adelante como hacia atrás. Después de reducir las mediciones desde distancias de pendiente a distancias horizontales, se puede emplear la ley de los cosenos para calcular los ángulos interiores, y se pueden fijar las coordenadas de la posición C. Luego se verifica la precisión de la corrección trazando el triángulo ABC y evaluando el error de cierre.
Medición de las distancias AC y BC.
A continuación, la red de trilateración se extiende midiendo las distancias CD y BD, y fijando el punto D en un sistema de coordenadas planas.
Fijación del punto de control D por trilateración.
¡PRUEBA ESTO!
UTILIZAR LA TRILATERACIÓN PARA DETERMINAR LA UBICACIÓN DE UN PUNTO DE CONTROL
La trilateración es una técnica que utilizan los agrimensores para calcular una posición indeterminada en un sistema de coordenadas planas midiendo distancias desde dos posiciones conocidas. Como verá más adelante en este capítulo, la trilateración es también la técnica que utilizan los receptores GPS para calcular sus posiciones en la superficie de la Tierra, en relación con las posiciones de tres o más transmisores satelitales. El propósito de este ejercicio es asegurarse de entender cómo funciona la trilateración. (Tiempo estimado para completar: 5 minutos.)
Nota: Necesitarás tener instalado el reproductor de Adobe Flash para poder completar este ejercicio. Si aún no tienes el Flash Player, puedes descargarlo gratis desde Adobe.
- Mostrar una cuadrícula de sistema de coordenadas: En este ejercicio, interactuará con una cuadrícula de sistema de coordenadas. Primero, muestre la cuadrícula del sistema de coordenadas en una ventana separada para que pueda interactuar con ella mientras lee estas instrucciones. Organice la ventana de cuadrícula del sistema de coordenadas y esta ventana para que pueda ver ambas fácilmente. Es posible que tengas que hacer esta ventana más estrecha. Dos puntos de control, A y B, se trazan en la rejilla del sistema de coordenadas. Una tripulación de levantamiento ha medido distancias desde los puntos de control hasta otro punto, el punto C, cuyas coordenadas son desconocidas. Tu trabajo es fijar la posición del punto C. Encontrarás el punto C en la intersección de dos círculos centrados en los puntos de control A y B, donde los radios de los dos círculos equivalen a las distancias medidas desde los puntos de control hasta el punto C.
- Trazar la distancia desde el punto de control A hasta el punto C: En la cuadrícula del sistema de coordenadas, haga clic en el punto de control A para mostrar el formulario de entrada de datos. (Deberá hacer clic en el punto real, no en la “A”). El formulario consiste en un campo de texto en el que se puede escribir en una distancia, y un botón que traza un círculo centrado en el punto A. El radio del círculo será la distancia que especifique. Según las mediciones de los agrimensura, la distancia entre el punto de control A y el punto C es de 9400 pies. Ingresa esa distancia ahora y haz clic en Trazar para trazar el círculo. [Ver resultado del paso 2]
- Trazar la distancia desde el punto de control B hasta el punto C: La distancia medida del punto B al punto C es de 7000 pies. Haga clic en el punto B (en el punto real, no en la “B”), ingrese esa distancia y trazar un círculo. [Ver resultado del paso 3]
- Punto de trazado C: Ahora haga clic dentro de la cuadrícula de coordenadas para revelar la posición del punto C. Puede que tenga que buscarlo, pero debe saber dónde buscar en función de la intersección de los círculos. [Ver resultado del paso 4]
- Extender aún más la red de control: Ahora continúe extendiendo la red de control trazando un cuarto punto, punto D, en la cuadrícula del sistema de coordenadas. Primero traza nuevos círculos en los puntos A y C. La distancia medida del punto A al punto D es de 9600 pies. La distancia medida desde el punto C hasta el punto D es de 8000 pies. (Es posible que desee establecer el radio del círculo centrado en el punto B en 0.) Finalmente, haga clic en la rejilla del sistema de coordenadas para trazar el punto D. [Ver resultado del paso 5]
Una vez que haya terminado de ver la cuadrícula, cierre la ventana emergente.
PRÁCTICA
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para realizar un cuestionario de autoevaluación sobre Posiciones Horizontales. Puedes tomar cuestionarios de práctica tantas veces como desees. No se califican y no afectan tu calificación de ninguna manera.
5.13. Posiciones Verticales
Una posición vertical es la altura de un punto relativo a alguna superficie de referencia, como el nivel medio del mar, un geoide o un elipsoide. Los aproximadamente 600,000 puntos de control verticales en el Sistema Nacional de Referencia Espacial (NSRS) de Estados Unidos están referenciados al Datum Vertical Norteamericano de 1988 (NAVD 88). Los topógrafos crearon el Datum Vertical Geodésico Nacional de 1929 (NGVD 29, el predecesor del NAVD 88), calculando la altura promedio del mar en todas las etapas de la marea en 26 estaciones mareales a lo largo de 19 años. Después extendieron la red de control tierra adentro utilizando una técnica de topografía llamada nivelación. La nivelación sigue siendo una forma rentable de producir datos de elevación con precisión submétrica.

Un equipo de nivelación en el trabajo en 1916. (Hodgson, 1916).
La ilustración anterior muestra un equipo de nivelación en el trabajo. El sujeto bajo el paraguas está mirando a través del telescopio de un instrumento de nivelación. Antes de tomar cualquier medida, el topógrafo se aseguró de que el telescopio estuviera ubicado a medio camino entre un punto de elevación conocido y el punto objetivo. Una vez nivelado correctamente el instrumento, enfocó el punto de mira del telescopio en una marca de altura en la varilla que sostenía el sujeto en el lado derecho de la imagen. El capazo en una rodilla está señalando en un libro de campo la medición de altura que llama el operador del telescopio.

Un nivel utilizado para determinar elevaciones.
La nivelación sigue siendo una forma rentable de producir datos de elevación con precisión submétrica. Un instrumento de nivelación moderno se muestra en la fotografía de arriba. El siguiente diagrama ilustra la técnica llamada nivelación diferencial.
Nivelación diferencial. (Adaptado de Wolf & Brinker, 1994)
El diagrama anterior ilustra la nivelación diferencial. Un instrumento de nivelación se coloca a medio camino entre un punto en el que se conoce la elevación del suelo (punto A) y un punto cuya elevación se va a medir (B). La altura del instrumento por encima de la elevación de referencia es HI. El topógrafo primero lee una medición de retrovisión (BS) de una varilla niveladora sostenida por su confiable asistente sobre el punto de referencia en A. La altura del instrumento se puede calcular como la suma de la elevación conocida en el punto de referencia (ZA) y la altura de visión trasera (BS). Luego, el asistente mueve la varilla al punto B. El topógrafo gira el telescopio 180°, luego lee una previsión (FS) de la varilla en B. La elevación en B (ZB) se puede calcular como la diferencia entre la altura del instrumento (HI) y la altura de previsión (FS).
El exalumno Henry Whitbeck (comunicación personal, otoño de 2000) señala que los topógrafos también utilizan estaciones totales para medir ángulos verticales y distancias entre puntos fijos (prismas montados sobre trípodes a alturas fijas), luego calculan elevaciones por nivelación trigonométrica.
ALTURAS
Los topógrafos utilizan el término altura como sinónimo de elevación. Hay varias formas diferentes de medir las alturas. Un nivel orientado correctamente define una línea paralela a la superficie geoide en ese punto (Van Sickle, 2001). Una elevación por encima del geoide se denomina altura ortométrica. Sin embargo, los receptores GPS no pueden producir alturas ortométricas directamente. En cambio, el GPS produce alturas relativas al elipsoide WGS 84. Por lo tanto, las elevaciones producidas con GPS se denominan alturas elipsoidales (o geodésicas).
PRÁCTICA
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para realizar un cuestionario de autoevaluación sobre Posiciones Verticales. Puedes tomar cuestionarios de práctica tantas veces como desees. No se califican y no afectan tu calificación de ninguna manera.
5.14. Sistema de Posicionamiento Global
Las señales de posicionamiento emitidas desde tres satélites del Sistema de Posicionamiento Global se reciben en una ubicación de la Tierra. (Administración Federal de Aviación de los Estados Unidos, 2007b)
El Sistema de Posicionamiento Global (GPS) emplea la trilateración para calcular las coordenadas de las posiciones en o cerca de la superficie de la Tierra. La trilateración se refiere a la ley trigonométrica mediante la cual se pueden determinar los ángulos interiores de un triángulo si se conocen las longitudes de los tres lados del triángulo. El GPS extiende este principio a tres dimensiones.
Un receptor GPS puede fijar su latitud y longitud calculando su distancia desde tres o más satélites en órbita terrestre, cuyas posiciones en el espacio y el tiempo son conocidas. Si cuatro o más satélites están dentro del “horizonte” del receptor, el receptor también puede calcular su elevación, e incluso su velocidad. El Departamento de Defensa de Estados Unidos creó el Sistema de Posicionamiento Global como una ayuda a la navegación. Desde que se declaró plenamente operativo en 1994, el posicionamiento GPS se ha utilizado para todo, desde rastrear vehículos repartidores, hasta rastrear los movimientos minuciosos de las placas tectónicas que conforman la corteza terrestre, hasta rastrear los movimientos de los seres humanos. Además del llamado segmento de usuario conformado por los receptores GPS y personas que los utilizan para medir posiciones, el sistema consta de otros dos componentes: un segmento espacial y un segmento de control. Se necesitaron alrededor de 10 mil millones de dólares en construirse en 16 años.
Rusia mantiene un sistema satelital de posicionamiento similar llamado GLONASS. Las naciones miembros de la Unión Europea están en proceso de desplegar un sistema propio comparable, llamado Galileo. El primer satélite experimental GIOVE-A comenzó a transmitir señales Galileo en enero de 2006. El objetivo del proyecto Galileo es una constelación de 30 satélites de navegación para 2020. Si los ingenieros y políticos logran que Galileo, GLONASS y el Sistema de Posicionamiento Global de Estados Unidos sean interoperables, como parece probable actualmente, el resultado será un Sistema Global de Navegación por Satélite (GNSS) que proporciona más del doble del recurso señal-en-espacio que está disponible con GPS solo. Los chinos comenzaron a trabajar en su propio sistema, llamado Beidou, en 2000. A finales de 2011 tenían diez satélites en órbita, sirviendo solo a China, con el objetivo de ser un sistema global de 35 satélites para 2020.
En esta sección aprenderás a:
- Explicar cómo se utilizan las señales de radio emitidas por los satélites del Sistema de Posicionamiento Global para calcular las posiciones en la superficie de la Tierra; y
- Describir las funciones de los segmentos de espacio, control y usuario del Sistema de Posicionamiento Global.
5.15. Segmento Espacial
El segmento espacial del Sistema de Posicionamiento Global consta actualmente de aproximadamente 30 satélites NAVSTAR activos y de repuesto (periódicamente se lanzan nuevos satélites y se dan de baja los antiguos). “NAVSTAR” significa “Sistema de navegación con sincronización y alcance”. Cada satélite rodea la Tierra cada 12 horas en tiempo sideral a lo largo de uno de los seis “planos” orbitales a una altitud de 20.200 km (unas 12.500 millas). Los satélites emiten señales utilizadas por los receptores GPS en tierra para medir posiciones. Los satélites están dispuestos de tal manera que al menos cuatro están “a la vista” en todas partes sobre o cerca de la superficie de la Tierra en todo momento, con típicamente hasta ocho y potencialmente 12 “a la vista” en un momento dado.

La constelación de satélites GPS. Ilustración © Smithsonian Institution, 1988. Usado por Permiso.
¡PRUEBA ESTO!
El Centro de Navegación de la Guardia Costera de Estados Unidos publica informes de estado sobre la constelación de satélites GPS. Su reporte del 17 de agosto de 2010, por ejemplo, enumeró 31 satélites, de cinco a seis en cada uno de los seis aviones orbitales (A-F), y una interrupción programada, el 19 de agosto de 2010. Puedes consultar el estado actual de la constelación aquí.
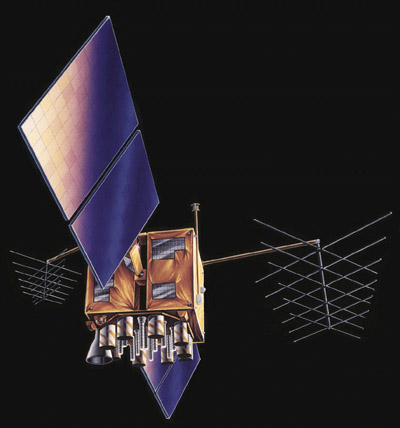
Reproducción artística de un satélite NAVSTAR (NAVSTAR GPS Joint Program Office, n.d.).
¡PRUEBA ESTO!
Los programadores científicos de la Administración Nacional de Aeronáutica y del Espacio de Estados Unidos (NASA) han creado un modelo interactivo y tridimensional de la Tierra y las órbitas de los más de 500 satélites artificiales que la rodean. El modelo es un applet Java llamado J-Track 3D Satellite Tracking. Su navegador debe tener Java habilitado para ver el applet. Las instrucciones en el sitio describen cómo puede acercar y alejar, y arrastrar para rotar el modelo. Para ver órbitas de satélites particulares, elija Seleccionar en el menú Satélite. Las series Block IIA y R son la generación más actual de satélites NAVSTAR.
5.16. Segmento de Control
El segmento de control del Sistema de Posicionamiento Global es una red de estaciones terrestres que monitorea la forma y velocidad de las órbitas de los satélites. La precisión de los datos GPS depende de conocer en todo momento las posiciones de los satélites. Las órbitas de los satélites a veces son perturbadas por la interacción de las fuerzas gravitacionales de la Tierra y la Luna.
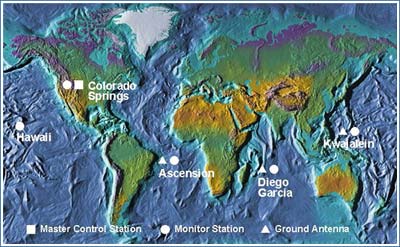
El segmento de control del Sistema de Posicionamiento Global (U.S. Federal Aviation Administration, 2007b).
Las Estaciones de Monitor son receptores GPS muy precisos instalados en ubicaciones conocidas. Registran discrepancias entre posiciones conocidas y calculadas causadas por ligeras variaciones en las órbitas de los satélites. Los datos que describen las órbitas se producen en la Estación de Control Maestro en Colorado Springs, se suben a los satélites y finalmente se transmiten como parte de la señal de posicionamiento GPS. Los receptores GPS utilizan los datos de este mensaje de navegación satelital para ajustar las posiciones que miden.
Si es necesario, el Centro de Control Maestro puede modificar las órbitas de los satélites mediante comandos transmitidos a través de las antenas terrestres del segmento de control.
5.17. Segmento de usuario
La Administración Federal de Aviación de Estados Unidos (FAA) estimó en 2006 que unos 500 mil receptores GPS están en uso para muchas aplicaciones, incluyendo topografía, transporte, agricultura de precisión, geofísica y recreación, sin mencionar la navegación militar. Esto fue antes de que los gadgets de navegación GPS en el automóvil surgieran como uno de los regalos electrónicos de consumo más populares durante la temporada navideña de 2007 en Norteamérica.
Los receptores GPS básicos de consumo, como el más bien anticuado que se muestra a continuación, consisten en un receptor de radio y antena interna, un reloj digital, algún tipo de interfaz de usuario gráfica y pulsador, un chip de computadora para realizar cálculos, memoria para almacenar waypoints, tomas para conectar una antena externa o descargar datos a una computadora y baterías de linterna para obtener energía. El receptor de radio en la unidad que se muestra a continuación incluye 12 canales para recibir la señal de múltiples satélites simultáneamente.

Receptor GPS de grado recreación, circa 1998.
Los satélites NAVSTAR Bloque II emiten a dos frecuencias, 1575.42 MHz (L1) y 1227.6 MHz (L2). (En aras de la comparación, las estaciones de radio FM emiten en la banda de 88 a 108 MHz.) Sólo L1 estaba destinado para uso civil. Los receptores de frecuencia única producen coordenadas horizontales con una precisión de aproximadamente tres a siete metros (o aproximadamente 10 a 20 pies) a un costo de aproximadamente $100. Algunas unidades permiten a los usuarios mejorar la precisión filtrando los errores identificados por receptores estacionarios cercanos, un post-proceso llamado “corrección diferencial”. Unidades de frecuencia única de 300-500 dólares que también pueden recibir señales L1 corregidas del Sistema de Aumento de Área Amplia de la Administración Federal de Aviación de los Estados Unidos ( WAAS) de estaciones terrestres y satélites puede realizar la corrección diferencial en “tiempo real”. Las coordenadas diferencialmente corregidas producidas por receptores de frecuencia única pueden ser tan precisas como de uno a tres metros (aproximadamente 3 a 10 pies).
La señal emitida en la frecuencia L2 está encriptada únicamente para uso militar. Los fabricantes inteligentes de receptores GPS pronto se dieron cuenta, sin embargo, de cómo hacer modelos de doble frecuencia que puedan medir ligeras diferencias en los tiempos de llegada de las dos señales (estos se llaman receptores de “diferencial de fase portadora”). Tales diferencias se pueden utilizar para explotar la frecuencia L2 para mejorar la precisión sin decodificar la señal militar encriptada. Los receptores de fase portadora de grado topográfico capaces de realizar corrección diferencial cinemática en tiempo real (RTK), pueden producir coordenadas horizontales con precisión submétrica a un costo de $1000 a $2000. No es de extrañar que el GPS haya reemplazado a los instrumentos electro-ópticos para muchas tareas de agrimensura.
En tanto, una nueva generación de satélites NAVSTAR (la serie Block IIR-M) agregará una señal civil a la frecuencia L2 que permitirá mejorar sustancialmente el posicionamiento GPS.
5.18. Distancia Satelital
Los receptores GPS calculan las distancias a los satélites en función del tiempo que tardan las señales de los satélites en llegar al suelo. Para hacer tal cálculo, el receptor debe ser capaz de decir con precisión cuándo se transmitió la señal, y cuándo se recibió. Los satélites están equipados con relojes atómicos extremadamente precisos, por lo que siempre se conoce el tiempo de las transmisiones. Los receptores contienen relojes más baratos, que tienden a ser fuentes de error de medición. Las señales emitidas por satélites, llamadas “códigos pseudoaleatorios”, van acompañadas de los datos de efemérides de difusión que describen las formas de las órbitas de los satélites.
Los receptores GPS calculan la distancia en función de la diferencia en el tiempo de emisión y recepción de una señal GPS. (Adaptado de Hurn, 1989).
La constelación GPS está configurada para que un mínimo de cuatro satélites esté siempre “a la vista” en todas partes de la Tierra. Si solo una señal de satélite estuviera disponible para un receptor, el conjunto de posibles posiciones incluiría toda la esfera de alcance que rodea al satélite.
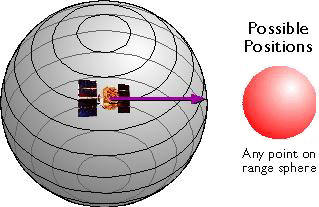
Conjunto de posibles posiciones de un receptor GPS con respecto a un solo satélite GPS. (Adaptado de Hurn, 1993).
Si hay dos satélites disponibles, un receptor puede decir que su posición está en algún lugar a lo largo de un círculo formado por la intersección de dos rangos esféricos.
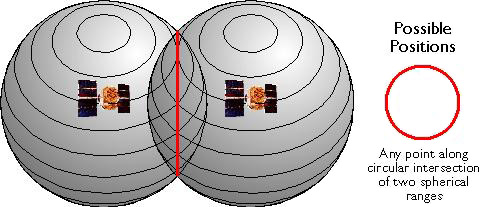
Conjunto de posiciones posibles de un receptor GPS en relación con dos satélites GPS. (Adaptado de Hurn, 1993).
Si se conocen las distancias de tres satélites, la posición del receptor debe ser uno de los dos puntos en la intersección de tres rangos esféricos. Los receptores GPS suelen ser lo suficientemente inteligentes como para elegir la ubicación más cercana a la superficie de la Tierra. Como mínimo, se requieren tres satélites para una fijación bidimensional (horizontal). Se necesitan cuatro rangos para una fijación tridimensional (horizontal y vertical).
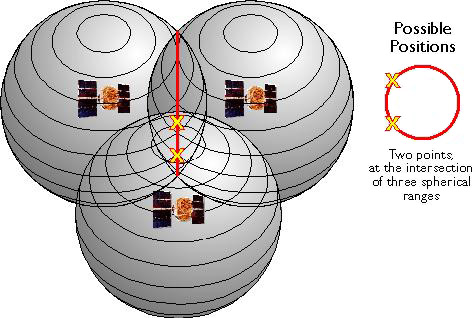
Conjunto de posibles posiciones de un receptor GPS en relación con tres satélites GPS. (Adaptado de Hurn, 1993).
El alcance satelital es similar en concepto al método de trilateración de topografía en avión, mediante el cual se calculan las posiciones horizontales en función de las distancias desde ubicaciones conocidas. La constelación de satélites GPS es en efecto una red de control en órbita.
¡PRUEBA ESTO!
Trimble tiene un tutorial “diseñado para darte una buena comprensión básica de los principios detrás del GPS sin cargarte con demasiados detalles técnicos”. Compruébalo en http://www.trimble.com/gps_tutorial/. Haga clic en “¿Por qué GPS?” para comenzar.
PRÁCTICA
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para realizar un cuestionario de autoevaluación sobre Componentes GPS. Puedes tomar cuestionarios de práctica tantas veces como desees. No se califican y no afectan tu calificación de ninguna manera.
5.19. Fuentes de error GPS
Un experimento mental (Wormley, 2004): Conecta tu receptor GPS a un trípode. Enciéndalo y registra su posición cada diez minutos durante 24 horas. Al día siguiente, traza las 144 coordenadas que calculó tu receptor. ¿Cómo se supone que se vería la trama?
¿Te imaginas una nube de puntos esparcidos por la ubicación real? Esa es una expectativa razonable. Ahora, imagina dibujar un círculo o elipse que abarque alrededor del 95 por ciento de los puntos. ¿Cuál sería el radio de ese círculo o elipse? (En otras palabras, ¿cuál es el error de posicionamiento de su receptor?)
La respuesta depende en parte de tu receptor. Si usaste un receptor de cien dólares, el radio del círculo que dibujaste podría ser de hasta diez metros para capturar el 95 por ciento de los puntos. Si utilizó un receptor de frecuencia única habilitado para WAAS que costó unos cientos de dólares, su elipse de error podría reducirse a uno a tres metros más o menos. Pero si hubieras gastado unos miles de dólares en un receptor de doble frecuencia, de grado de encuesta, tu radio de círculo de error podría ser tan pequeño como un centímetro o menos. En general, los usuarios de GPS obtienen lo que pagan.
A medida que crece el mercado del posicionamiento GPS, los receptores son cada vez más baratos. Aún así, hay muchas aplicaciones de mapeo para las cuales no es práctico usar una unidad de grado topográfico. Por ejemplo, si tu asignación era GPS 1,000 pozos de registro para tu municipio, probablemente no querrías configurar y calibrar un receptor de grado topográfico 1,000 veces. ¿Cómo, entonces, se pueden minimizar los errores asociados con los receptores de grado de mapeo? Un comienzo sensato es entender las fuentes del error GPS.
En esta sección aprenderás a:
- Indicar los tipos y magnitud de error e incertidumbre asociados con el posicionamiento GPS no corregido; y
- Utilice un gráfico PDOP para determinar los tiempos óptimos para el posicionamiento GPS en una ubicación y fecha determinadas.
Nota: Mi fuente principal para el material en esta sección es el texto GPS de Jan Van Sickle para Agrimensores, 2a Ed. Si quieres un tratamiento legible y mucho más detallado de este material, te recomiendo el libro de Jan. Consulte la bibliografía al final de este capítulo para obtener más información sobre este y otros recursos.
5.20. Errores de rango equivalente de usuario
“UERE” es el término paraguas para todas las fuentes de error a continuación, las cuales se presentan en orden descendente de sus contribuciones al presupuesto total de errores.
- Reloj satelital: Los receptores GPS calculan sus distancias desde los satélites en función de la diferencia de tiempo entre cuando una señal es transmitida por un satélite y cuándo se recibe en tierra. Los relojes atómicos a bordo de los satélites NAVSTAR son extremadamente precisos. Tienden a perder hasta un milisegundo de tiempo GPS estándar (que está calibrado, pero no idéntico al Tiempo Universal Coordinado). Las estaciones de monitoreo que conforman el “Segmento de Control” GPS calculan la cantidad de deriva de reloj asociada a cada satélite. Los receptores GPS que son capaces de hacer uso de los datos de corrección de reloj que acompañan a las señales GPS pueden reducir significativamente el error de reloj.
- Atmósfera superior (ionosfera): El espacio es casi un vacío, pero la atmósfera no lo es. Las señales GPS se retrasan y se desvían a medida que pasan a través de la ionosfera, las capas más externas de la atmósfera que se extienden de aproximadamente 50 a 1,000 km sobre la superficie de la Tierra. Las señales transmitidas por satélites cercanos al horizonte toman una ruta más larga a través de la ionosfera que las señales de los satélites aéreos, y por lo tanto están sujetas a una mayor interferencia. La densidad de la ionosfera varía según la latitud, por la estación y por la hora del día, en respuesta a la radiación ultravioleta del Sol, a las tormentas solares y a los máximos, y a la estratificación de la propia ionosfera. Sin embargo, el Segmento de Control GPS es capaz de modelar sesgos ionosféricos. Las estaciones de monitoreo transmiten correcciones a los satélites NAVSTAR, que luego difunden las correcciones junto con la señal GPS. Dichas correcciones eliminan solo alrededor de las tres cuartas partes del sesgo, sin embargo, dejando a la ionosfera como el segundo mayor contribuyente al presupuesto de error GPS.
- Reloj receptor: Los receptores GPS están equipados con relojes de cristal de cuarzo que son menos estables que los relojes atómicos utilizados en los satélites NAVSTAR. El error de reloj del receptor se puede eliminar, sin embargo, comparando los tiempos de llegada de las señales de dos satélites (cuyos tiempos de transmisión se conocen exactamente).
- Órbita satelital: Los receptores GPS calculan coordenadas relativas a las ubicaciones conocidas de los satélites en el espacio. Saber dónde están los satélites en un momento dado implica conocer las formas de sus órbitas así como sus velocidades. Las atracciones gravitacionales de la Tierra, el Sol y la Luna complican las formas de las órbitas de los satélites. El Segmento de Control GPS monitorea las ubicaciones de los satélites en todo momento, calcula excentricidades orbitales y compila estas desviaciones en documentos llamados efemérides. Se compila una efemérides para cada satélite y se emite con la señal satelital. Los receptores GPS que son capaces de procesar efemérides pueden compensar algunos errores orbitales.
- Atmósfera inferior: (troposfera, tropopausa y estratosfera) Las tres capas inferiores de la atmósfera encapsulan la Tierra desde la superficie hasta una altitud de unos 50 km. La atmósfera más baja retrasa las señales GPS, sumando ligeramente a las distancias calculadas entre satélites y receptores. Las señales de los satélites cercanos al horizonte son las que más se retrasan, ya que pasan por más atmósfera que las señales de los satélites de arriba.
- Multitrayecto: Idealmente, las señales GPS viajan desde los satélites a través de la atmósfera directamente a los receptores GPS. En realidad, los receptores GPS deben discriminar entre las señales recibidas directamente de los satélites y otras señales que han sido reflejadas desde objetos circundantes, como edificios, árboles, e incluso el suelo. Algunas, pero no todas, las señales reflejadas son identificadas automáticamente y rechazadas. Las antenas están diseñadas para minimizar la interferencia de las señales reflejadas desde abajo, pero las señales reflejadas desde arriba son más difíciles de eliminar. Una técnica para minimizar los errores de trayectoria múltiple es rastrear solo aquellos satélites que están al menos 15° por encima del horizonte, un umbral llamado “ángulo de máscara”.
Douglas Welsh (comunicación personal, Invierno 2001), Inspector Supervisor de Petróleo y Gas del Departamento de Protección Ambiental de Pensilvania, escribió sobre los desafíos asociados con el posicionamiento GPS en nuestro cuello del bosque: “... en muchas partes de Pensilvania el horizonte es el factor limitante. En una ciudad con edificios altos y los profundos valles de algunas partes de Pensilvania es difícil encontrar una hora del día en la que la constelación tenga cuatro satélites a la vista por cualquier cantidad de tiempo. En los bosques con maderas duras altas, el multitrayecto es tan frecuente que dudaría de la precisión de cualquier mancha a menos que se tomara una lectura varias veces”. Van Sickle (2005) señala, sin embargo, que los esfuerzos de modernización del GPS y el GNSS bien pueden mejorar tales brechas.
¿Has tenido experiencias similares con el GPS? Si es así, por favor publique un comentario en esta página.
5.21. Dilución de precisión
La disposición de los satélites en el cielo también afecta la precisión del posicionamiento GPS. La disposición ideal (de los cuatro satélites mínimos) es un satélite directamente sobre la cabeza, otros tres igualmente espaciados cerca del horizonte (por encima del ángulo de la máscara). Imagina un vasto paraguas que abarca la mayor parte del cielo, donde los satélites forman la punta y los extremos de las espinas del paraguas.
Las coordenadas GPS calculadas cuando los satélites se agrupan muy juntos en el cielo sufren de dilución de precisión (DOP), un factor que multiplica la incertidumbre asociada a los Errores de Rango Equivalente de Usuario (UERE — errores asociados con los relojes de satélite y receptor, la atmósfera , las órbitas de los satélites y las condiciones ambientales que conducen a errores multitrayecto). El DOP asociado a una disposición ideal de la constelación satelital equivale aproximadamente a 1, lo que no magnifica UERE. Según Van Sickle (2001), el DOP más bajo que se encuentra en la práctica es de aproximadamente 2, lo que duplica la incertidumbre asociada a UERE.
Los receptores GPS reportan varios componentes del DOP, incluyendo Dilución Horizontal de Precisión (HDOP) y Dilución Vertical de Precisión (VDOP). La combinación de estos dos componentes de la posición tridimensional se llama PDOP — dilución de posición de precisión. Un elemento clave de la planificación de misiones GPS es identificar la hora del día en que se minimiza el PDOP. Dado que las órbitas de los satélites son conocidas, el PDOP se puede predecir para un tiempo y ubicación dados. Varios productos de software le permiten determinar cuándo son las mejores condiciones para el trabajo del GPS.
El estudiante del MGIS Jason Setzer (Invierno 2006) ofrece la siguiente anécdota ilustrativa:
He tenido la oportunidad de utilizar la tecnología de levantamiento GPS para recopilar datos de control de tierra en mi región y el mayor desafío suele ser el problema del PDOP (dilución de posición de precisión). El problema en mi zona montañosa es la forma en que el terreno realmente ocluye al receptor para que no acceda a suficientes señales satelitales.
Durante una encuesta en Colorado Springs me encontré con un ejemplo bastante extremo de esto. Geográficamente, Colorado Springs está ubicado justo contra las cordilleras del frente de las Montañas Rocosas, con 14,000 pies Pike's Peak justo al oeste de la ciudad. Mi unidad GPS fue fácilmente capaz de 'ver' cinco, seis o incluso siete satélites mientras estaba en la mitad oriental de la ciudad. No obstante, cuanto más al oeste viajaba, comencé a ver progresivamente menos de la constelación, hasta el punto en que mi receptor sólo podía encontrar uno o dos satélites. Si una vista horizontal a horizonte de 180 grados del cielo es ideal, entonces en ciertos lugares podría ver tal vez 110 grados.
No hubo ningún trabajo real alrededor, aparte de la paciencia. Pude ajustar mis puntos de levantamiento lo suficiente como para maximizar mi visión del cielo. A partir de ahí solo era cuestión de tiempo... Cada ave GPS tiene un tiempo de órbita de alrededor de doce horas, así que en un par de instancias tuve que esperar hasta dos horas en un lugar determinado para que suficientes de ellos fueran visibles. Mi unidad GPS calcula automáticamente PDOP y muestra el número de satélites disponibles. Entonces el valor del PDOP nunca fue tan bajo como me hubiera gustado, pero sí bajó lo suficiente como para finalmente estar dentro de límites aceptables. ¡La próxima vez podría enviar a un proveedor para tal proyecto!
¡PRUEBA ESTO!
Trimble, un fabricante líder de receptores GPS, ofrece software de planificación de misiones GPS para descargas gratuitas. Esta actividad te presentará las capacidades del software, y te preparará para responder preguntas sobre la planificación de misiones GPS más adelante.
(El software de planificación de misiones es una aplicación para Windows (.exe). Los usuarios de Mac, así como los usuarios de Windows, ven debajo de los pasos numerados.)
- Visitar el sitio web de Trimble
- Descargue el software de planificación Trimble, instálelo en su computadora (observe dónde está instalando sus Common Files) e inicie la aplicación.
- Instalar un almanaque: En el menú Almanaque, mueva el cursor a Importar y en el submenú, elija Almanaque | navegue hasta la carpeta donde se instalaron los Archivos Comunes | seleccione almanac.alm y haga clic en el botón Abrir | haga clic en Aceptar.
(Si tu sistema operativo Windows está instalado en tu unidad C, entonces el nombre de la ruta al archivo almanac.alm probablemente se vea así, con o sin el “(x86)”:
C:Archivos de programa (x86) Common FilestrimblePlanning) - Elegir Archivo | Estación... Elija una ubicación en la que tal vez desee planificar una misión GPS.
- Elija Satélite | Información para explorar las características de los satélites GPS activos, GLONASS y WAAS.
- Elija Gráficas | DOP | DOP — posición para ver cómo la combinación de HDOP y VDOP varían a lo largo de un periodo seleccionado de 24 horas en la ubicación seleccionada. ¿Se pueden determinar las mejores y peores horas del día para el trabajo del GPS?
Si bien Trimble todavía pone a disposición de forma gratuita el software de planificación que utilizó anteriormente, no están incluyendo el acceso a un almanaque actualizado (información sobre satélites actualmente disponibles). Te habrás dado cuenta de que el almanaque que cargaste era de 2010.
Sin embargo, si vas aquí encontrarás una interfaz interactiva que te da acceso a una versión más actual de la misma funcionalidad que la app de planeación utilizada anteriormente.
PRÁCTICA
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para realizar un cuestionario de autoevaluación sobre Fuentes de Error GPS. Puedes tomar cuestionarios de práctica tantas veces como desees. No se califican y no afectan tu calificación de ninguna manera.
5.22. Corrección de errores GPS
Una variedad de factores, incluyendo los relojes en satélites y receptores, la atmósfera, las órbitas de los satélites y las superficies reflectantes cerca del receptor, degradan la calidad de las coordenadas GPS. La disposición de los satélites en el cielo puede empeorar las cosas (una condición llamada dilución de precisión). Se han desarrollado diversas técnicas para filtrar los errores de posicionamiento. Los errores aleatorios pueden superarse parcialmente simplemente promediando correcciones repetidas en la misma ubicación, aunque a menudo esta no es una solución muy eficiente. Los errores sistemáticos pueden ser compensados modelando el fenómeno que causa el error y prediciendo la cantidad de desplazamiento. Algunos errores, como los errores de trayectoria múltiple causados cuando las señales GPS se reflejan en carreteras, edificios y árboles, varían en magnitud y dirección de un lugar a otro. Otros factores, como los relojes, la atmósfera y las excentricidades orbitales, tienden a producir errores similares en grandes áreas de la superficie de la Tierra al mismo tiempo. Los errores de este tipo pueden corregirse utilizando una colección de técnicas llamadas corrección diferencial.
En esta sección aprenderás a:
- Explicar el concepto de corrección diferencial y otros métodos utilizados para mejorar la precisión del posicionamiento GPS; y
- Realizar corrección diferencial utilizando datos y servicios de la Encuesta Geodésica Nacional de Estados Unidos.
5.23. Corrección Diferencial
La corrección diferencial es una clase de técnicas para mejorar la precisión del posicionamiento GPS mediante la comparación de mediciones tomadas por dos o más receptores. Así es como funciona:
Las ubicaciones de dos receptores GPS, uno estacionario, uno móvil, se ilustran a continuación. El receptor estacionario (o “estación base”) registra continuamente su posición fija sobre un punto de control. La diferencia entre la ubicación real de la estación base y su ubicación calculada es una medida del error de posicionamiento que afecta a ese receptor en esa ubicación en cada momento dado. En este ejemplo, la estación base se encuentra a unos 25 kilómetros del receptor móvil (o “rover”). El operador del receptor móvil se mueve de un lugar a otro. El operador podría estar registrando direcciones para una base de datos E-911, o árboles dañados por infestaciones de polillas gitanas, o alumbrado público mantenido por un departamento de obras públicas
Una estación base GPS se fija sobre un punto de control, mientras que a unos 25 km de distancia, se utiliza un receptor GPS móvil para medir una serie de posiciones.
La siguiente ilustración muestra las posiciones calculadas al mismo instante (3:01pm) por la estación base (izquierda) y el receptor móvil (derecha).
Posiciones reales y calculadas de una estación base y receptor móvil.
La estación base calcula la corrección necesaria para eliminar el error en la posición calculada en ese momento a partir de las señales GPS. La corrección se aplica posteriormente a la posición calculada por el receptor móvil en el mismo instante. La posición corregida no es perfectamente precisa porque los tipos y magnitudes de errores que afectan a los dos receptores no son idénticos, y debido a la baja frecuencia del código de temporización del GPS.
La corrección de errores calculada en la estación base se aplica a la posición calculada por el receptor móvil.

Estación base GPS utilizada para la corrección diferencial. Observe que la antena está ubicada directamente encima de un monumento de punto de control.
5.24. Corrección diferencial en tiempo real
Para que la corrección diferencial funcione, las correcciones grabadas por el receptor móvil deben sincronizarse con las correcciones grabadas por la estación base (o estaciones). Puede proporcionar su propia estación base o usar señales de corrección producidas por estaciones de referencia mantenidas por la Administración Federal de Aviación de los Estados Unidos, la Guardia Costera de Estados Unidos u otras agencias públicas o servicios de suscripción privados. Dado el equipo necesario y las señales disponibles, la sincronización puede realizarse inmediatamente (“tiempo real”) o después del hecho (“post-procesamiento”). Primero consideremos el diferencial en tiempo real.
Los receptores habilitados para WAAS son un ejemplo económico de corrección diferencial en tiempo real. “WAAS” significa Sistema de aumento de área amplia, una colección de alrededor de 25 estaciones base establecidas para mejorar el posicionamiento GPS en las pistas de los aeropuertos de Estados Unidos hasta el punto de que el GPS se puede usar para ayudar a aterrizar aviones (U.S. Federal Aviation Administration, 2007c). Las estaciones base WAAS transmiten sus mediciones a una estación maestra, donde se calculan las correcciones y luego se hacen ascender a dos satélites geosincrónicos (se planean 19). El satélite WAAS transmite entonces señales diferencialmente corregidas a la misma frecuencia que las señales GPS. Las señales WAAS compensan los errores de posicionamiento medidos en las estaciones base WAAS, así como las correcciones de errores de reloj y las estimaciones regionales de los errores de la atmósfera superior (Yeazel, 2003). Los receptores habilitados para WAAS dedican uno o dos canales a las señales WAAS y pueden procesar las correcciones WAAS. La red WAAS fue diseñada para proporcionar una precisión de aproximadamente 7 metros de manera uniforme en toda su área de servicio de EE.
DGPS: La Guardia Costera de Estados Unidos ha desarrollado un sistema similar, llamado Servicio de Posicionamiento Global Diferencial. La red DGPS incluye unos 80 sitios de difusión, cada uno de los cuales incluye una estación base de grado topográfico y un transmisor de “radiobaliza” que emite señales de corrección a 285-325 kHz (justo debajo de la banda de radio AM). Los receptores GPS compatibles con DGPS incluyen una conexión a un receptor de radio que puede sintonizar una o más “balizas” seleccionadas. Diseñado para la navegación en el mar cerca de las costas de Estados Unidos, DGPS proporciona precisiones no peores que los 10 metros. Stephanie Brown (comunicación personal, otoño de 2003) informó que donde trabaja en Georgia, “con una buena constelación de satélites por encima, [precisión DGPS] suele ser de 4.5 a 8 pies”.
La corrección diferencial en tiempo real de grado topográfico se puede lograr mediante una técnica llamada GPS cinemática en tiempo real (RTK). Según el topógrafo Laverne Hanley (comunicación personal, otoño de 2000), “la cinemática en tiempo real requiere un enlace de radiofrecuencia entre una estación base y el rover. He logrado una precisión mejor que el centímetro de esta manera, aunque la instrumentación es sensible y requiere de gran habilidad por parte del operador. Varias veces descubrí que tenía una gran geometría GPS, pero había perdido mi enlace con la estación base. También ha ocurrido lo contrario, donde quería grabar posiciones y tenía un enlace de radio de regreso a la estación base, pero la geometría del GPS estaba mala”.
5.25. Corrección Diferencial Post-Procesada
El posicionamiento cinemático puede ofrecer precisiones de 1 parte en 100,000 a 1 parte en 750,000 con observaciones relativamente breves de solo uno a dos minutos cada una. Para aplicaciones que requieran precisiones de 1 parte en 1,000,000 o superiores, incluyendo estudios de control y mediciones de movimientos de las placas tectónicas de la Tierra, se requiere posicionamiento estático (Van Sickle, 2001). En el posicionamiento GPS estático, dos o más receptores miden sus posiciones desde ubicaciones fijas en periodos de 30 minutos a dos horas. Los receptores pueden estar situados a una distancia de hasta 300 km. Solo los receptores diferenciales de fase portadora de doble frecuencia capaces de medir las diferencias en el tiempo de llegada de la señal GPS civil (L1) y la señal militar encriptada (L2) son adecuados para tal posicionamiento estático de alta precisión.
CORS y OPUS: La Encuesta Geodésica Nacional de Estados Unidos (NGS) mantiene un Servicio de Usuario de Posicionamiento en Línea (OPUS) que permite a los topógrafos corregir diferencialmente las mediciones estáticas GPS adquiridas con un solo receptor diferencial de fase portadora de frecuencia dual después de regresar del campo. Los usuarios suben mediciones en un formato estándar de Receiver Independent eXchange (RINEX) a computadoras NGS, las cuales realizan correcciones diferenciales haciendo referencia a tres estaciones base seleccionadas seleccionadas de una red de estaciones de referencia que operan continuamente. NGS supervisa dos redes CORS; una compuesta por sus 600 estaciones base propias, otra una cooperativa de agencias públicas y privadas que acuerdan compartir los datos de sus estaciones base y mantener las estaciones base según las especificaciones de NGS.
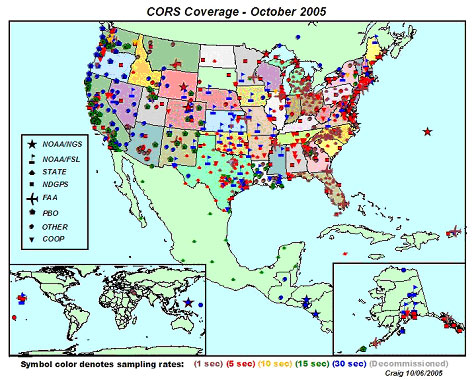
La red de estaciones de referencia de funcionamiento continuo (CORS) (Slay, 2005)
El mapa anterior muestra la distribución de las redes CORS nacionales y cooperativas combinadas. Observe que los símbolos de estación están coloreados para indicar la velocidad de muestreo a la que se almacenan los datos de la estación base. Después de 30 días, se requiere que todas las estaciones almacenen datos de estaciones base solo en incrementos de 30 segundos. Esta política limita la utilidad de las correcciones OPUS al posicionamiento estático (aunque también se puede mejorar la precisión de observaciones cinemáticas más largas). Consciente del hecho de que la demanda de GPS estático está disminuyendo constantemente, los planes futuros de NGS incluyen la transmisión de datos de la estación base CORS para su uso en tiempo real en el posicionamiento cinemático.
¡PRUEBA ESTO!
Esta actividad opcional (aportada por Chris Piburn de CompassData Inc.) lo guiará a través del proceso de corrección diferencial de las mediciones estáticas GPS utilizando el Servicio de Usuario de Posicionamiento en Línea (OPUS) de NGS, que se refiere a la red de Estaciones de Referencia de Operación Continua (CORS).
El contexto es un proyecto CompassData que involucró un estudio GPS diferencial de fase portadora en un área de estudio remoto en Alaska. El objetivo era levantar un conjunto de nueve puntos de control terrestre (GCP) que posteriormente serían utilizados para ortorectificar las imágenes satelitales de un cliente. Tan remota es esta zona que no estaba disponible ningún punto de control NGS en el momento en que se llevó a cabo el proyecto. La alternativa era establecer una estación base para el proyecto y fijar su posición precisamente con referencia a las estaciones CORS en funcionamiento en otros lugares de Alaska.
El equipo del proyecto voló en helicóptero hasta una colina ubicada en el centro del área de estudio. Con cierta dificultad martillaron una barra de refuerzo #5 de 18 pulgadas en el suelo rocoso para que sirviera como monumento de control. Después de instalar un receptor de estación base GPS sobre la barra de armadura, volaron para comenzar la recolección de datos con su receptor rover. Gracias al clima favorable, Chris y su equipo recopilaron los nueve GCP fotoidentificables requeridos el primer día. La estación base ubicada en el centro permitió al equipo minimizar las distancias entre la base y el rover, lo que significaba que podrían minimizar el tiempo requerido para arreglar cada GCP. Al final del día, el equipo había producido cinco horas de datos GPS en la estación base y nueve ocupaciones de quince minutos en las GCP
Como era de esperar, los datos GPS brutos no eran lo suficientemente precisos para cumplir con los requisitos del proyecto. (Las diversas fuentes de errores aleatorios y sistemáticos que contribuyen a la incertidumbre de los datos GPS se consideran en otra parte de este capítulo). En particular, el monumento martillado en la cima del cerro no era apto para su uso como punto de control debido a que la incertidumbre asociada a su posición era demasiado grande. El primer paso del equipo del proyecto para eliminar los errores de posicionamiento fue posprocesar los datos utilizando un software de procesamiento de línea base, que ajusta las distancias de línea base calculadas (entre la estación base y los nueve GCP) comparando la fase de la onda portadora GPS a medida que llegó simultáneamente tanto a la estación base y el rover. El siguiente paso fue fijar la posición de la estación base precisamente en relación con las estaciones CORS que operan en otras partes de Alaska.
Los siguientes pasos lo guiarán a través del proceso de envío de las cinco horas de datos de estaciones base de doble frecuencia al Servicio de Usuario de Posicionamiento en Línea (OPUS) de la Encuesta Nacional Geodésica de Estados Unidos, e interpretar los resultados. (Para información sobre OPUS, vaya aquí)
1. Descarga el archivo de datos GPS. El archivo comprimido en formato RINEX es de aproximadamente 6 Mb de tamaño y tardará aproximadamente 1 minuto en descargarse a través de DSL o cable de alta velocidad, o aproximadamente 15 minutos a través de un módem de 56 Kbps. Si no puedes descargar este archivo, contáctame de inmediato para que podamos ayudarte a resolver el problema.
- WILD282u.zip (5.8 Mb)
Los receptores GPS producen datos en los formatos patentados de sus fabricantes. NGS requiere que los datos GPS se conviertan al formato “Receiver Independent eXchange” (RINEX) para su compatibilidad con OPUS. La mayoría de los paquetes de software que vienen con las unidades GPS tienen una utilidad incorporada para convertir sus datos GPS al formato RINEX. El propio NGS utiliza software de conversión gratuito proporcionado por un consorcio sin fines de lucro patrocinado por el gobierno llamado UNAVCO.
2. Examine el archivo RINEX.
- Extraiga el archivo RINEX “Wild282U.05O” de su archivo ZIP.
- Abra “Wild282u.05o” con el Bloc de notas de Microsoft o WordPad. (WordPad hace un mejor trabajo conservando columnas de texto en este caso. Establezca la palabra wrap en off.) O bien, usa otro editor de texto. (En cualquier ventana abierta del editor de texto, en el cuadro de diálogo Archivo > Abrir, asegúrese de que “Archivos de tipo:” esté configurado en “Todos los archivos” para que aparezca el archivo de destino en la lista.)
El archivo de observación RINEX contiene toda la información sobre las señales que el receptor de la estación base de CompassData rastreó durante la encuesta de Alaska. Explicar todo el contenido del archivo está mucho más allá del alcance de esta actividad. Por ahora, anote las líneas que dan a conocer el tipo de antena, la posición aproximada de la antena y la altura de la antena. Reportará estos parámetros a OPUS en el siguiente paso.
3. Enviar datos GPS a OPUS
- Señale su navegador a la página principal de OPUS e ingrese la información necesaria para “Cargar su archivo de datos”.
- (OPUS paso 1) Haz clic en el botón Examinar para abrir una ventana de Subir Archivo. Navegue y cargue el archivo RINEX que descargó anteriormente. Para agilizar su envío, elija el archivo comprimido “WILD282u.zip”.
- (OPUS paso 2) Seleccione el tipo de antena. Consulte la línea etiquetada “ANT #/TYPE” en el archivo RINEX que abrió en su editor de texto. Debe encontrar el tipo de antena “TPSHIPER_PLUS”. Elija este tipo de la lista desplegable.
- (OPUS paso 3) Ingresa la altura de la antena sobre el monumento. Consulte la línea etiquetada “ANTENA: DELTA H/E/N” en el archivo RINEX que abrió en su editor de texto. El primer valor en esa línea, “1.0854″, es H, en metros. (Consulte el sitio web de OPUS para obtener más información sobre la altura de la antena).
- (OPUS paso 4) Ingresa la dirección de correo electrónico a la que deseas que te devuelvan tus resultados.
- (OPUS paso 5) Opciones. OPUS permite a los usuarios especificar una zona del sistema de coordenadas de plano estatal, seleccionar o excluir estaciones de referencia CORS particulares, solicitar salida estándar o extendida y establecer un perfil de usuario para su uso con trabajos futuros. Para esta actividad, no se necesitan cambios en la configuración predeterminada.
- (OPUS paso 6) Haga clic en el botón “Subir a STATIC” para enviar los datos para corrección diferencial en relación con tres estaciones de referencia CORS. Dependiendo de cuántas solicitudes haya en la cola de NGS, los resultados pueden ser devueltos en minutos u horas. Cuando se probó esta actividad, la cola incluía solo una solicitud (ver ventana a continuación, que aparece después de que las solicitudes se enviaron correctamente) y los resultados se devolvieron en tan solo unos minutos, pero en el pasado ha tardado hasta 10 minutos.
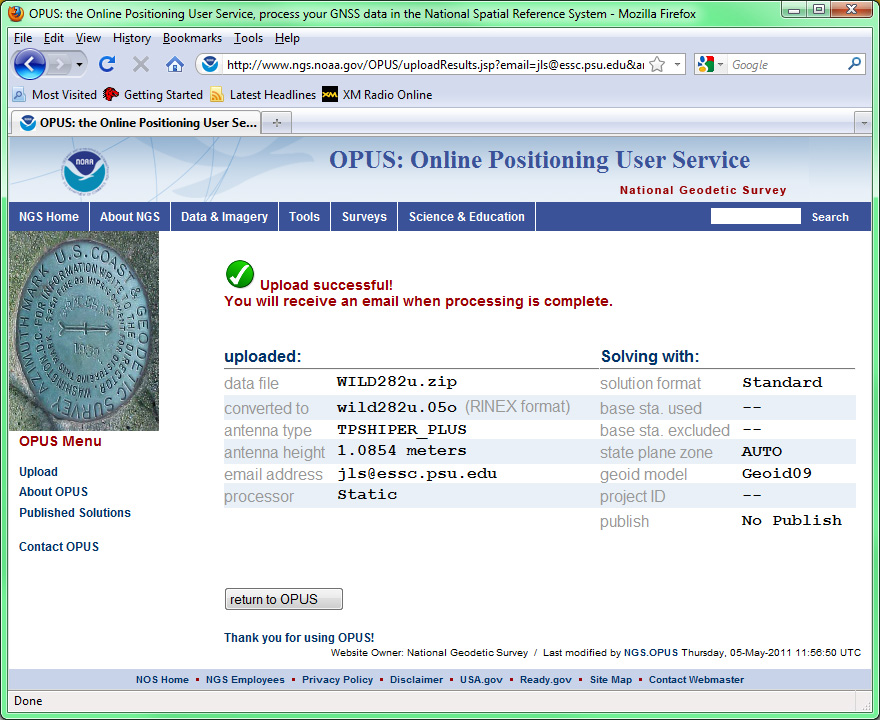
Cargar reporte de resultados, Posicionamiento Online User Service, Encuesta Geodésica Nacional de Estados Unidos.
Cuando reciba su solución OPUS por correo electrónico de retorno, querrá descubrir la magnitud de la corrección diferencial que calculó OPUS. Para ello necesitarás determinar (a) la posición no corregida originalmente calculada por la estación base, (b) la posición corregida calculada por OPUS y (c) la distancia marca a marca entre las posiciones original y corregida. Además del archivo RINEX original que descargó anteriormente, necesitará la solución OPUS y dos utilidades de software gratuitas proporcionadas por NGS. Los enlaces a estas utilidades se enumeran a continuación.
4. Determinar la posición del receptor de la estación base antes de la corrección diferencial.
- Consulte el archivo RINEX “Wild282U.05o” que abrió en su editor de texto. La novena línea del archivo RINEX enumera la posición del receptor de la estación base en las coordenadas X, Y, Z Centradas en la Tierra Fijadas a la Tierra. Se trata de un sistema de coordenadas cartesianas tridimensional cuyo origen es el centro de masa de la Tierra (como el dato NAD 83) .-2389892.2740 -1608765.8567 5672855.7386 POSICIÓN APROX XYZ
NGS proporciona una utilidad de conversión para transformar estos valores X, Y, Z a coordenadas de latitud y longitud más familiares y alturas elipsoidales.
- Ir a la conversión NGS' XYZ a GEODÉTICA.
- Ingresa las coordenadas X, Y, Z que se encuentran en el archivo RINEX. Tu resultado debe ser:
- Latitud = 63°13'53.74280″ N
- Longitud = 146°03'12.12710″ W
- Altura = 1349.2248 m
5. Determinar la posición corregida del receptor de la estación base. La solución OPUS que recibe por correo electrónico informa las coordenadas corregidas en las coordenadas X, Y, Z fijas en la Tierra Centradas en la Tierra, como coordenadas geográficas, y como coordenadas UTM y Plano Estatal. Busque las coordenadas de latitud y longitud y la altura elipsoidal que se especifican en relación con el dato NAD 83. Deben estar muy cerca de:
- Latitud = 63°13'53.73892″ N
- Longitud = 146°03'11.98942″ O
- Altura = 1348.756 m
6. Calcular la diferencia entre las posiciones originales y corregidas de la estación base. NGS proporciona otra utilidad de software para calcular la distancia tridimensional entre dos posiciones. A diferencia del anterior convertidor XYZ a GEODÉTICO, sin embargo, el “invers3d.exe” es un programa que descargas en tu computadora.
- Descargar “invers3d.exe”
- Haga doble clic en el nombre del archivo para ejecutar el programa y elija la opción de coordenadas geodésicas.
- Prestando mucha atención a los formatos requeridos, ingresa la latitud, longitud y alturas elipsoidales no corregidas que calculaste en el paso 4 anterior.
- A continuación, elija nuevamente la opción de coordenadas geodésicas, ingrese las coordenadas corregidas y la altura que calculó en el paso 5.
- Entre los resultados, busque la “distancia de marca a marca” calculada. Esta es la magnitud de la corrección OPUS.
PRÁCTICA
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para realizar un cuestionario de autoevaluación sobre Corrección de Errores GPS. Puedes tomar cuestionarios de práctica tantas veces como desees. No se califican y no afectan tu calificación de ninguna manera.
5.26. Resumen
Las posiciones son un elemento fundamental de los datos geográficos. Conjuntos de posiciones forman características, ya que las letras en esta página forman palabras. Las posiciones son producidas por actos de medición, que son susceptibles a errores humanos, ambientales e instrumentales. Los errores de medición no se pueden eliminar, pero los errores sistemáticos pueden ser estimados y compensados.
Los agrimensores utilizan instrumentos especializados para medir ángulos y distancias, a partir de los cuales calculan posiciones horizontales y verticales. El Sistema de Posicionamiento Global (y en una medida potencialmente mayor, el emergente Sistema Global de Navegación por Satélite) permite tanto a los topógrafos como a los ciudadanos comunes determinar posiciones midiendo distancias a tres o más satélites en órbita terrestre. Como has leído en este capítulo (y puede conocerse por experiencia personal), la tecnología GPS ahora rivaliza con los dispositivos de posicionamiento electro-óptico (es decir, “estaciones totales” que combinan la medición del ángulo óptico y los instrumentos electrónicos de medición de distancia) tanto en costo como en rendimiento. Esto plantea la pregunta: “Si los receptores GPS de grado topográfico pueden producir datos puntuales con una precisión subcentímetro, ¿por qué los dispositivos de posicionamiento electro-óptico siguen siendo tan utilizados?” En noviembre de 2005 planteé esta pregunta a dos expertos —Jan Van Sickle y Bill Toothill— cuyo trabajo había utilizado como referencias mientras preparaba este capítulo. También disfruté de una fructífera conversación con un estudiante experimentado llamado Sean Haile (otoño de 2005). Esto es lo que tenían que decir:
Jan Van Sickle, autor de GPS para Agrimensores y Coordenadas GIS Básicas, escribió:
En general se puede decir que el costo de una buena estación total (combinación de EDM y teodolito) es similar al costo de un buen receptor GPS de 'grado encuestado'. Si bien un nuevo receptor GPS puede costar un poco más, ciertamente hay ofertas para receptores bien usados. Sin embargo, en muchos casos un sistema RTK que podría ofrecer una producción similar a un EDM requiere de dos receptores GPS y ahí, obviamente, la ecuación de costos no se sostiene. En tal caso la EDM es menos costosa.
Aún así, esa no es toda la historia. En algunas circunstancias, como los grandes levantamientos topográficos, la producción de GPS RTK supera al EDM independientemente del diferencial de costos del equipo. Recuerda, necesitas una línea de visión con el EDM. Por supuesto, si una topografía se hace demasiado grande, es más rentable hacer el trabajo con fotogrametría. Y si se vuelve realmente grande, es más rentable usar imágenes satelitales y tecnología de teledetección.
Ahora, hablemos de precisión. Es importante tener en cuenta que el GPS no es capaz de proporcionar alturas ortométricas (elevaciones) sin un modelo geoide. Los modelos geoides están mejorando todo el tiempo, pero están lejos de ser perfectos. El EDM por otro lado no tiene tal dificultad. Con los procedimientos adecuados debe ser capaz de proporcionar alturas ortométricas con muy buena precisión relativa sobre un área local. Pero, es importante recordar que la precisión relativa sobre un área local con línea de visión que es necesaria para una buena producción (EDM) es aplicable a algunas circunstancias, pero no a otras. A medida que el área crece, a medida que la línea de visión es muy importante, y se requiere una precisión más absoluta, la ventaja del GPS aumenta.
También hay que mencionar que la idea de que el GPS puede proporcionar precisión de nivel cm siempre debe ser discutida en el contexto de la pregunta, ¿en relación con qué control y en qué dato?
En términos relativos, sobre un área local, utilizando buenos procedimientos, sin duda es posible decir que una EDM puede producir resultados superiores al GPS en alturas (niveles) ortométricos con cierta consistencia. Es mi opinión que esta idea es la razón por la que es raro que un topógrafo haga replanteo detallado de construcción con GPS, es decir, bordillo y canaleta, alcantarillado, agua, etc. Por otro lado, es común que los topógrafos estaquen esquinas de propiedad con GPS en un sitio de desarrollo, y otras características donde se encuentra la vertical aspecto no es crítico. No es que el GPS no pueda proporcionar alturas muy precisas, es solo que se necesita más tiempo y esfuerzo para hacerlo con esa tecnología en comparación con EDM en esta área en particular (componente vertical).
Ciertamente es cierto que el GPS no es muy adecuado para todas las aplicaciones de topografía. Sin embargo, no existe una tecnología de topografía que sea adecuada para todas las aplicaciones de topografía. Por otro lado, es mi opinión que uno estaría muy presionado para argumentar que cualquier tecnología de topografía es obsoleta. Es decir, cada sistema tiene fortalezas y debilidades y eso aplica también al GPS.
Bill Toothill, profesor del Departamento de Ciencias Geoambientales e Ingeniería de la Universidad Wilkes, escribió:
El GPS es igual de preciso a corto alcance y más preciso a distancias más largas que los equipos electroópticos. El costo del GPS está bajando y puede que no sea mucho más que un instrumento electro-óptico de gama alta. El GPS es muy adecuado para todas las aplicaciones de topografía, aunque para un paquete pequeño (menos de un acre), los instrumentos tradicionales como una estación total pueden resultar más rápidos. Esto depende de la disponibilidad de sitios de referencia locales (control) y de los requisitos de referencia del sistema de coordenadas de la encuesta.
La mayoría de las unidades GPS de grado topográfico (frecuencia dual) pueden lograr precisiones a nivel de centímetros con tiempos de ocupación bastante cortos. En el caso de RTK esto puede ser de tan solo cinco segundos con una comunicación adecuada a una 'base' de radiodifusión. Las precisiones subcentimétricas es otra historia. Para lograr un subcentímetro, que la mayoría de los topógrafos no necesitan, requiere tiempos de ocupación mucho más largos, lo que no es propicio para el trabajo de 'producción' en un entorno empresarial. La mayoría de las aplicaciones de subcentímetros se utilizan para la investigación, la mayoría de las cuales están en la categoría de deformación geológica. He estado usando GPS de doble frecuencia durante los últimos ocho años en el Parque Nacional Yellowstone estudiando la deformación de la Caldera Yellowstone. Para lograr resultados subcentímetros necesitamos al menos 4-6 horas de tiempo de ocupación en cada punto a lo largo de un transecto.
Sean Haile, empleado del Servicio de Parques de Estados Unidos en el Parque Nacional Zion cuyas responsabilidades incluyen el trabajo de SIG y GPS, está en desacuerdo con algunas de estas declaraciones, así como con parte del material del capítulo. Mientras un estudiante en esta clase en el otoño de 2005, Sean escribió:
Una comparación de los productos disponibles de [un fabricante] muestra que las tecnologías tradicionales pueden lograr una precisión de 3mm. En condiciones ideales, el equipo GPS más avanzado solo puede obtener una precisión de 5 mm, con resultados del mundo real probablemente más cercanos a 10mm. Es cierto que el GPS suele ser la tecnología más rápida y fácil de usar en el campo en comparación con las soluciones electro-ópticas, y con niveles de precisión comparables ha desplazado a los métodos tradicionales. Sin embargo, si el topógrafo necesita ser preciso al mm, las herramientas electro-ópticas son más precisas que el GPS.
No hay manera, ninguna, de que puedas comprar una unidad de subcentímetro en cualquier lugar por $1000-2000. Sí, los precios están bajando, pero solo recientemente (los últimos tres años) incluso se podría comprar una unidad GPS de precisión submétrica de un solo canal por menos de 10,000 dólares. Las unidades que mencionas en el capítulo por $1000-2000, serían 'vende tu próximo kin' caro durante ese mismo periodo de tiempo. No estoy en el negocio de medir placas tectónicas, pero trato diariamente con unidades GPS de corrección diferencial de grados de levantamiento y mapeo, así puedo hablar por experiencia sobre esa.
¿Y la respuesta de Bill de que el GPS es adecuado para todas las aplicaciones de encuestas? Bueno, sinceramente suplico diferir. El GPS es poco adecuado para la topografía donde hay una visión limitada del horizonte. Podrías esperar para siempre y nunca obtener el número requerido de SVs. Incluso con la planeación de la misión. Obstrucciones como cubierta alta de dosel, edificios altos, grandes paredes de roca... todas estas cosas pueden resultar en altos errores de múltiples trayectorias, lo que puede arruinar datos de las mejores unidades GPS. Ninguna de estas cosas afecta al EDM. Sí, puedes superar las malas condiciones de recolección de GPS (hasta cierto punto) desplazando tu punto desde una ubicación donde la señal es buena, pero cuando haces eso, estás tomando las medidas exactas (distancia, ángulo) que estarías haciendo con un EDM ¡excepto con un instrumento que no es adecuado para esa aplicación!
El Sistema Global de Navegación por Satélite (GNSS) puede superar algunas de las limitaciones del posicionamiento GPS. Aún así, estos expertos parecen estar de acuerdo en que tanto el GPS como los métodos de topografía electro-óptica llegaron para quedarse.
QUIZ
Los estudiantes registrados de Penn State deben regresar ahora a la carpeta Capítulo 5 en ANGEL (a través del menú Recursos a la izquierda) para acceder al cuestionario calificado para este capítulo. Este cuenta. Puedes tomar cuestionarios calificados solo una vez.
El propósito del cuestionario es asegurar que has estudiado el texto de cerca, que has dominado las actividades de práctica y que has cumplido con los objetivos de aprendizaje del capítulo. Le invitamos a revisar el capítulo durante el cuestionario.
Una vez que haya enviado el cuestionario y publicado cualquier pregunta que pueda tener en nuestros foros de discusión o páginas de capítulos, habrá completado el Capítulo 5.
COMENTARIOS Y PREGUNTAS
Los estudiantes registrados son bienvenidos a publicar comentarios, preguntas y respuestas a preguntas sobre el texto. Particularmente bienvenidos son las anécdotas que relacionan el texto del capítulo con su experiencia personal o profesional. Además, hay foros de discusión disponibles en el sistema de gestión de cursos ANGEL para comentarios y preguntas sobre temas que quizás no desees compartir con todo el mundo.
Para publicar un comentario, desplácese hacia abajo hasta el cuadro de texto debajo de “Publicar nuevo comentario” y comience a escribir en el cuadro de texto, o puede optar por responder a un hilo existente. Cuando termine de escribir, haga clic en el botón “Vista previa” o “Guardar” (Guardar realmente presentará su comentario). Una vez publicado tu comentario, podrás editarlo o eliminarlo según sea necesario. Además, podrás responder a otras publicaciones en cualquier momento.
Nota: las primeras palabras de cada comentario se convierten en su “título” en el hilo.
5.27. Bibliografía
Brinker, R. C. & Wolf, P. R. (1984). Topografía elemental (7ª ed.). Nueva York: Harper y Row.
Dana, P. H. (1998). Visión general del sistema de posicionamiento global. El proyecto artesanal del geógrafo. Recuperado el 2 de agosto de 1999, de www.colorado.edu/geography/gcraft/notes/gps/gps_f.html
Doyle, D. R. (1994). Desarrollo del Sistema Nacional de Referencia Espacial. Recuperado el 10 de febrero de 2008, de http://www.ngs.noaa.gov/PUBS_LIB/develop_NSRS.html
Comité Federal de Control Geodésico (1988). Normas de precisión geodésica geométrica y especificaciones para el uso de técnicas de posicionamiento relativo GPS. Recuperado el 10 de febrero de 2008, dewww.ngs.noaa.gov/fgcs/tech_pub/geomgeod.pdf Recuperado 14 de septiembre de 2013, fromdocs.lib.noaa.gov/noaa_documents/nos/ngs/geom_geod_accu_standards.pdf
Hall, G. W. (1996). Servicio de navegación GPS diferencial USCG. Recuperado el 9 de noviembre de 2005, de http://www.navcen.uscg.gov/pdf/dgps/dgpsdoc.pdf
Hodgson, C. V. Base de medición con cinta invar. Cinta en marcha. Línea base y fiesta astro, ca. 1916. NOAA Colección de Fotos Históricas (2004). Recuperado el 20 de abril de 2006, de http://www.photolib.noaa.gov/.
Hurn, J. (1989). GPS: Una guía para la siguiente utilidad. Sunnyvale CA: Trimble Navigation Ltd.
Hurn, J. (1993). GPS Diferencial Explicado. Sunnyvale CA: Trimble Navigation Ltd.
Monmonier, M. (1995). Litigio fronterizo y el mapa como evidencia. En Dibujar la Línea: Cuentos de Mapas y Cartocontroversia. Nueva York: Henry Holt.
Encuesta Geodésica Nacional (n. d.). Recuperado el 4 de noviembre de 2009, de http://www.ngs.noaa.gov
Encuesta Geodésica Nacional (n.d.). Levantamiento Geodésico Nacional — CORS, Estación de Referencia en Operación Continua. Recuperado el 15 de agosto de 2012, de www.ngs.noaa.gov/cors/
Oficina del Programa Conjunto NAVSTAR GPS. Recuperado 21 de octubre de 2000, fromgps.losangeles.af.mil/
Nórdica, E. T. (2004). Seguimiento de nuevas señales desde el espacio: modernización GPS y tecnología Trimble R-Track. Recuperado el 9 de noviembre de 2005, de www.trimble.com/survey_wp_gpssys. asp? nav=collection -27596 Recuperado el 14 de septiembre de 2013, dewww.geosystems.co.nz/drupal/files/u1/images/construction/R-Track_Technology_and_GPS_Modernization.pdf
Raisz, E. (1948). Serie McGraw-Hill en geografía: Cartografía general (2a ed.). York, PA: The Maple Press Company.
Robinson, A. et al. (1995). Elementos de la cartografía (5ª ed.). Nueva York: John Wiley & Sons.
Museo Nacional del Aire y el Espacio Smithsonian (1998). GPS: Una nueva constelación. Recuperado el 2 de agosto de 1999, de http://www.nasm.si.edu/gps/
Slay, R. (2005, 13 de septiembre). Foro de usuarios de CORS: hacia el posicionamiento en tiempo real. Presentación de Power Point presentada en el Foro de Usuarios de CORS 2005, Long Beach, CA. Presentación recuperada el 26 de octubre de 2005, de http://www.ngs.noaa.gov/CORS/Presentations/CORSForum2005/Richard_Snay_Forum2005.pdf
Thompson, M. M. (1988). Mapas para América, productos cartográficos del Servicio Geológico de Estados Unidos y otros (3d ed.). Reston, Va.: Servicio Geológico de Estados Unidos.
Centro de Navegación de la Guardia Costera de Estados Unidos (n .d.). Información general de la DGPS. Recuperado el 10 de febrero de 2008, de http://www.navcen.uscg.gov/?pageName=dgpsMainwww.navcen.uscg.gov/
Administración Federal de Aviación de Estados Unidos (2007a). Preguntas frecuentes. Recuperado el 10 de febrero de 2008, de http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/faq/gps/
Administración Federal de Aviación de Estados Unidos (2007b). Sistema de Posicionamiento Global: Cómo funciona. Recuperado el 10 de febrero de 2008, de http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/gps/howitworks/
Administración Federal de Aviación de Estados Unidos. (2007c). Sistema de Aumento de Área Amplia. Recuperado el 10 de febrero de 2008, de http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/gps/howitworks/
Van Sickle, J. (2001). GPS para agrimensores. Nueva York: Taylor y Francis.
Van Sickle, J. (2004). Coordenadas GIS básicas. Boca Ratón: Prensa CRC.
Wolf, P. R. & Brinker, R. C. (1994). Topografía elemental (9ª ed.). NY, NY: Editorial HarperCollins College.
Wormley, S. (2006). Errores de GPS y estimación de la precisión de su receptor. Recuperado el 20 de abril 2006, de www.edu-observatory.org/gps/gps_accuracy.html
Yeazel, J. (2006). WAAS y su relación con receptores GPS portátiles habilitados. Recuperado el 12 de octubre de 2005, de http://gpsinformation.net/exe/waas.html