
7.2: Rectificadores de precisión
- Page ID
- 87792

Imagina por un momento que te gustaría rectificar de media onda la salida de un oscilador. Probablemente lo primero que te viene a la cabeza es el uso de un diodo, como en la Figura\(\PageIndex{1}\). Como se muestra, el diodo pasa medias ondas positivas y bloquea medias ondas negativas. Pero, ¿qué pasa si la señal de entrada es de solo 0.5 V pico? La rectificación nunca ocurre porque el diodo requiere de 0.6 a 0.7 V para encenderse. Incluso si se usa un dispositivo de germanio con una caída hacia adelante de 0.3 V, se perderá una porción considerable de la señal. No solo eso, el circuito de la Figura\(\PageIndex{1}\) exhibe impedancias muy diferentes a la fuente de accionamiento. Incluso si la señal es lo suficientemente grande como para evitar la dificultad de caída de voltaje directo, la impedancia de la fuente debe ser relativamente baja. A primera vista parece que es imposible rectificar una pequeña señal de CA con alguna esperanza de precisión.
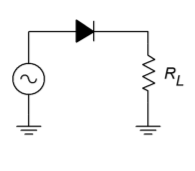
Figura\(\PageIndex{1}\): Rectificador pasivo.
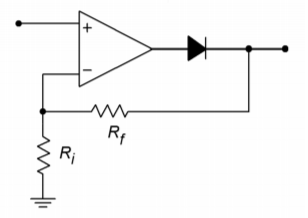
Uno de los ítems señalados en el Capítulo 3 sobre la retroalimentación negativa fue el hecho de que tendía a compensar errores. La retroalimentación negativa tiende a reducir los errores en una cantidad igual a la ganancia del bucle. Siendo este el caso, debería ser posible reducir la caída de voltaje directo del diodo en un factor muy grande colocándolo dentro de un bucle de retroalimentación. Esto se muestra en la Figura\(\PageIndex{2}\), y se denomina rectificador de media onda de precisión.
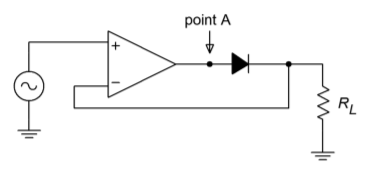
Figura\(\PageIndex{2}\): Rectificador de media onda de precisión.
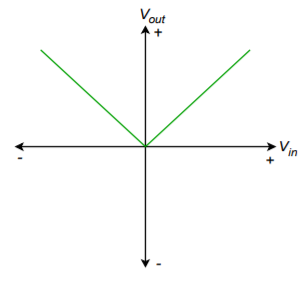
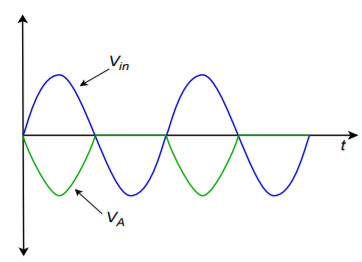
A una primera aproximación, cuando la entrada es positiva, el diodo está polarizado hacia delante. En esencia, el circuito se reduce a un simple seguidor de voltaje con una alta impedancia de entrada y una ganancia de voltaje de uno, por lo que la salida se ve igual que la entrada. Por otro lado, cuando la entrada es negativa, el diodo tiene polarización inversa, abriendo el bucle de retroalimentación. No se permite corriente de señal a la carga, por lo que el voltaje de salida es cero. Sin embargo, gracias al amplificador operacional, la fuente de conducción todavía ve una alta impedancia. La forma de onda de salida consiste solo en las porciones positivas de la señal de entrada, como se muestra en la Figura\(\PageIndex{3}\). Debido al efecto de la retroalimentación negativa, incluso las señales pequeñas pueden rectificarse correctamente. La característica de transferencia resultante se presenta en la Figura\(\PageIndex{4}\). Se ve una curva perfecta de entrada/salida uno a uno para las señales de entrada positivas, mientras que las señales de entrada negativas producen un potencial de salida de cero.
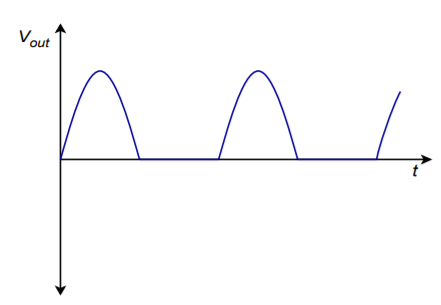
Figura\(\PageIndex{3}\): Señal de salida.
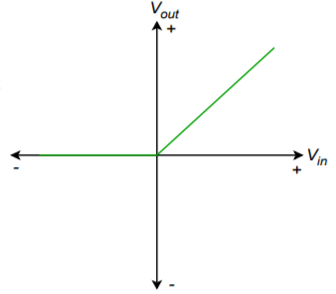
Figura\(\PageIndex{4}\): Característica de transferencia.
Para crear la forma de onda de salida del circuito, el amplificador operacional crea una forma de onda completamente diferente en su pin de salida. Para partes positivas de la entrada, el amplificador operacional debe producir una señal que sea aproximadamente 0.6 a 0.7 V mayor que la salida final del circuito. Esta señal extra compensa efectivamente la caída directa del diodo. Debido a que la señal de retroalimentación se deriva después del diodo, la compensación es lo más cercana que permite la ganancia de bucle disponible. A bajas frecuencias donde la ganancia de bucle es alta, la compensación es casi exacta, produciendo una copia casi perfecta de señales positivas. Cuando la señal de entrada oscila en negativo, el amplificador operacional intenta hundir corriente en respuesta. A medida que lo hace, el diodo se polariza hacia atrás y el flujo de corriente se detiene. En este punto, la entrada no inversora del amplificador operacional verá un gran potencial negativo en relación con la entrada inversora. La señal de error negativa resultante obliga a la salida del amplificador operacional a pasar a saturación negativa. Debido a que el diodo permanece con polarización inversa, la salida del circuito permanece en 0 V. El amplificador operacional ya no es capaz de impulsar la carga. Esta condición persistirá hasta que la señal de entrada vuelva a ser positiva, momento en el que la señal de error se vuelve positiva, polarizando hacia adelante el diodo y permitiendo que fluya la corriente de carga. El amplificador operacional y las formas de onda de salida del circuito se muestran en la Figura\(\PageIndex{5}\).
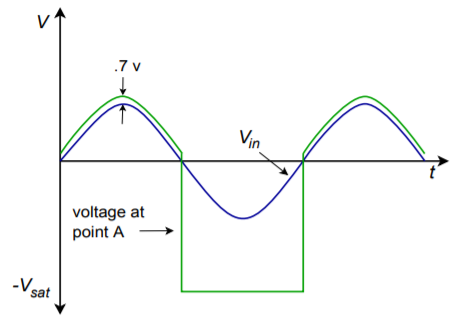
Figura\(\PageIndex{5}\): Salida de amplificador operacional.
Un elemento a tener en cuenta sobre la Figura\(\PageIndex{5}\) es la cantidad de tiempo que tarda el amplificador operacional en entrar y salir de la saturación negativa. Este tiempo está determinado por la tasa de respuesta del dispositivo. Junto con la disminución de la ganancia de bucle a frecuencias más altas, la velocidad de rotación determina qué tan precisa será la rectificación. Supongamos que el amplificador operacional está en saturación negativa y que se produce un pulso de entrada positivo rápido. Para rastrear esto, el amplificador operacional debe salir primero de la saturación negativa. Usando un amplificador operacional 741 con suministros de\(\pm\) 15 V, tomará alrededor de 26\(\mu\) s pasar de saturación negativa (-13 V) a cero. Si el pulso antes mencionado tiene solo 20\(\mu\) s de ancho, el circuito no tiene tiempo suficiente para producir el pulso. El pulso de entrada volverá a ser negativo, antes de que el amplificador operacional tenga la oportunidad de “salir de su agujero”. Si el pulso positivo fuera un poco más largo, digamos 50\(\mu\) s, el amplificador operacional podría rastrear una parte de él. El resultado sería una señal distorsionada como se muestra en la Figura\(\PageIndex{6}\).
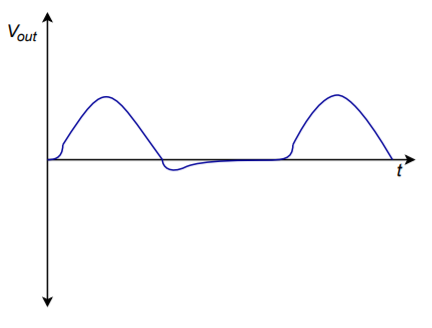
Figura\(\PageIndex{6}\): Errores de alta frecuencia.
Para rectificar con precisión las señales de movimiento rápido, se requieren amplificadores operacionales con alta velocidad\(f_{unity}\) y velocidad de giro. Si solo se van a rectificar las señales lentas, es posible configurar el circuito con ganancia moderada si es necesario, como medida de ahorro de costos. Esto se muestra en la Figura\(\PageIndex{7}\). Finalmente, para la salida de media onda negativa, la única modificación requerida es la inversión del diodo.
Figura\(\PageIndex{7}\): Rectificador con ganancia.
Simulación por Computadora
Una simulación Multisim del circuito mostrado en la Figura\(\PageIndex{2}\) se presenta en la Figura 7.8. El circuito se muestra redibujado con los nodos etiquetados. Este ejemplo utiliza el modelo de amplificador operacional 741 examinado anteriormente. La forma de onda de salida también se muestra en la Figura\(\PageIndex{8}\). Anote la exactitud de la rectificación. También se muestra la salida del amplificador operacional para que los efectos de la retroalimentación negativa ilustrados en\(\PageIndex{5}\) sean claramente visibles. Debido a que este circuito utiliza un modelo de amplificador operacional preciso, es muy instructivo volver a ejecutar la simulación para frecuencias de entrada más altas. De esta manera, se muestran las limitaciones de velocidad inherentes del amplificador operacional, y se\(\PageIndex{6}\) pueden anotar efectos como los que se presentan en la Figura.
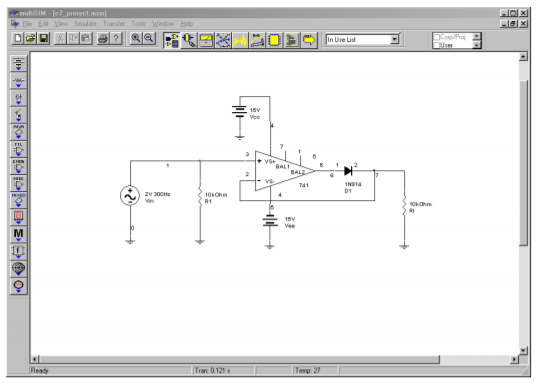
Figura\(\PageIndex{8a}\): Esquema de simulación de rectificador de precisión.
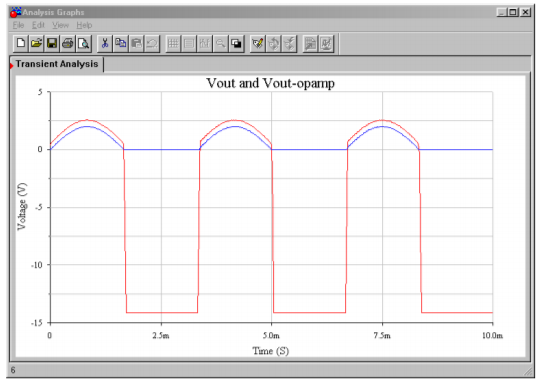
Figura\(\PageIndex{8b}\): Formas de onda de salida del rectificador de precisión.
7.2.1: Detector de picos
Una variación del rectificador básico de media onda es el detector de picos. Este circuito producirá una salida que es igual al valor pico de la señal de entrada. Esto se puede configurar para picos positivos o negativos. La salida de un detector de pico se puede utilizar para aplicaciones de instrumentación o medición. También se puede considerar como una camilla de pulso analógico.
Un simple detector de pico positivo se muestra en la Figura\(\PageIndex{9}\). Así es como funciona: La primera parte del circuito es un rectificador de media onda positiva de precisión. Cuando su salida está subiendo, el condensador,\(C\), se está cargando. Este voltaje se presenta al segundo amplificador operacional que sirve como búfer para la carga final. La impedancia de salida del primer amplificador operacional es baja, por lo que la constante de tiempo de carga es muy rápida y, por lo tanto, la señal a través\(C\) está muy cerca de la señal de entrada. Cuando la señal de entrada comienza a balancearse hacia tierra, la salida del primer amplificador operacional comienza a caer junto con él. Debido al voltaje del condensador, el diodo termina en polarización inversa, abriendo así la unidad a\(C\). \(C\)comienza a descargarse, pero la constante de tiempo de descarga será mucho más larga que la constante de tiempo de carga. La resistencia de descarga es una función de\(R\), la impedancia que mira en la entrada no inversora del amplificador operacional 2, y la impedancia que mira en la entrada inversora del amplificador operacional 1, todo en paralelo. Normalmente, se utilizan dispositivos de entrada FET, por lo que desde un punto de vista práctico,\(R\) establece la velocidad de descarga.
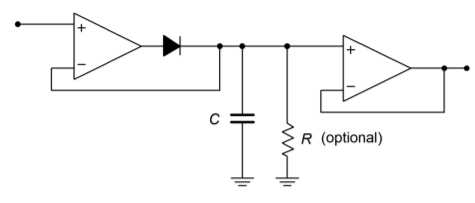
Figura\(\PageIndex{9}\): Detector de picos.
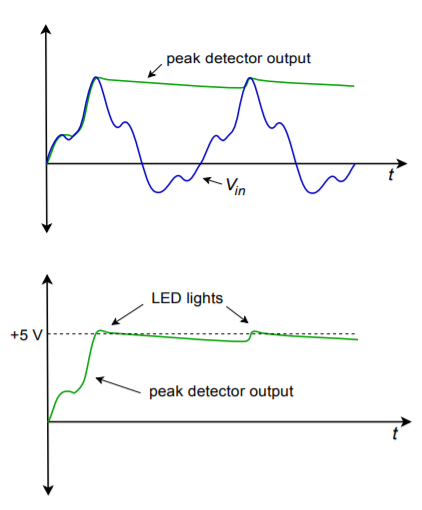
El condensador continuará descargándose hacia cero hasta que la señal de entrada suba lo suficiente como para adelantarla nuevamente. Si la constante de tiempo de descarga es mucho más larga que el período de entrada, la salida del circuito será un valor de CC igual al valor pico de la entrada. Si la constante de tiempo de descarga es algo más corta, tiene el efecto de alargar el tiempo del pulso. También tiene el efecto de producir el contorno general, o envolvente, de señales complejas, por lo que a veces se le llama detector de envolvente. Las posibles señales de salida se muestran en la Figura\(\PageIndex{10}\). Para tiempos de descarga muy largos, se deben usar capacitores grandes. Los condensadores más grandes, por supuesto, producirán un alargamiento del tiempo de carga (es decir, el tiempo de subida sufrirá). Los capacitores grandes también pueden degradar el rendimiento de giro. \(C\)solo se puede cargar tan rápido porque un amplificador operacional dado solo puede producir una corriente finita. Esto no es diferente al caso presentado con capacitores de compensación en el Capítulo Cinco. Como ejemplo, si C es 10\(\mu\) F, y la corriente de salida máxima del amplificador operacional es 25 mA,
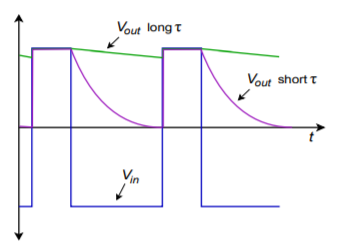
Figura\(\PageIndex{10}\): Efecto de\(\tau\) sobre la forma del pulso.
\[ i = C \frac{dv}{dt} \nonumber \]
\[ \frac{dv}{dt} = \frac{i}{C} \nonumber \]
\[ \frac{dv}{dt} = \frac{25 mA}{10 \mu F} \nonumber \]
\[ \frac{dv}{dt} = 2500 V/s \nonumber \]
\[ \frac{dv}{dt} = 2.5 mV/\mu s \nonumber \]
¡Esta es una tasa de respuesta muy lenta! Si se utilizan dispositivos de entrada FET, la resistencia efectiva a la descarga puede ser muy alta, disminuyendo así el requisito de\(C\). Para aplicaciones típicas,\(C\) sería muchas veces menor que el valor utilizado aquí. Para tiempos de descarga largos, se deben usar capacitores de alta calidad, ya que su fuga interna colocará el límite superior en la resistencia de descarga.
Ejemplo\(\PageIndex{1}\)
Se utiliza un detector de pico positivo junto con un simple comparador en la Figura\(\PageIndex{11}\) para monitorear los niveles de entrada y advertir de posibles sobrecargas. El LF412 es una versión de doble paquete del LF411. Explica cómo funciona y determina el punto en el que se enciende el LED.
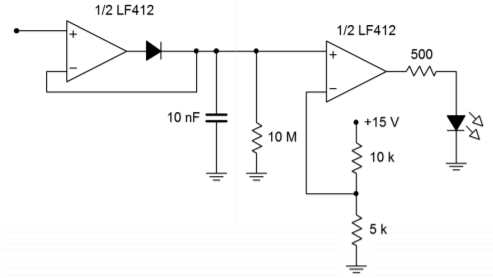
Figura\(\PageIndex{11}\): Detector por Ejemplo\(\PageIndex{1}\).
El problema básico al intentar monitorear visualmente una señal para detectar sobrecargas es que el pico de sobrecarga puede llegar y ir más rápido de lo que el ojo humano puede detectarlo. Por ejemplo, la señal podría enviarse a un comparador que podría encender un LED cuando se excede un umbral preestablecido. Cuando la señal de entrada cae, el comparador y el LED pasarán al estado apagado. A pesar de que el LED se enciende en el pico, permanece encendido por tan poco tiempo que los humanos no lo notarán. Este tipo de resultado es bastante posible en la industria de las comunicaciones, donde la salida del micrófono de una emisora de radio producirá ondas muy dinámicas con muchos picos. Estos picos pueden causar estragos en otros equipos a lo largo de la línea. El LED necesita permanecer encendido por períodos más largos.
El circuito de la Figura\(\PageIndex{11}\) utiliza un detector de picos para estirar los pulsos positivos. Estos pulsos estirados se alimentan luego a un comparador, que acciona un LED. Los pulsos de entrada se expanden, por lo que el LED permanecerá encendido por períodos más largos.
La constante de tiempo de descarga se establece por\(R\) y\(C\). Debido a que se utilizan dispositivos de entrada FET, su impedancia es lo suficientemente alta como para ignorarla.
\[ T = RC \nonumber \]
\[ T = 10 M \Omega \times 10 nF \nonumber \]
\[ T = 100 ms \nonumber \]
El condensador de 10 nF es lo suficientemente pequeño como para mantener una velocidad de giro razonable. Es posible que desee verificar esto como un ejercicio. El punto de disparo del comparador es establecido por el divisor de\(\Omega\) voltaje de 10 k\(\Omega\) /5 k a 5 V. Cuando la señal de entrada se eleva por encima de 5 V, la salida del comparador va alta. Suponiendo que la caída directa del LED es de aproximadamente 2.5 V, la\(\Omega\) resistencia 500 limita la corriente de salida a
\[ I_{LED} = \frac{V_{sat} − V_{LED}}{500} \nonumber \]
\[ I_{LED} = \frac{13 V−2.5 V}{500} \nonumber \]
\[ I_{LED} = \frac{10.5 V}{500} \nonumber \]
\[ I_{LED} = 21 mA \nonumber \]
El LF412 debería poder entregar esta corriente.
En resumen, entonces, los pulsos de entrada son estirados por el detector de picos. Si alguno de los pulsos resultantes es mayor a 5 V, el comparador se dispara y enciende el LED. Un ejemplo de onda de entrada/salida se muestra en la Figura\(\PageIndex{12}\). El único problema con esto es que solo se detectan picos positivos. Si existen grandes picos negativos, no harán que el LED se encienda. Es posible usar un circuito similar para detectar picos negativos y usar esa salida para accionar un LED común junto con el detector de pico positivo. Otra forma de lograr esto es utilizar un rectificador/detector de onda completa.
Figura\(\PageIndex{12}\): Formas de onda para el circuito de la Figura\(\PageIndex{11}\).
7.2.2: Rectificador de Onda Completa de Precisión
Un rectificador de onda completa tiene la característica de entrada/salida que se muestra en la Figura\(\PageIndex{13}\). No importa cuál sea la polaridad de entrada, la salida siempre es positiva. Por esta razón, a este circuito a menudo se le conoce como un circuito de valor absoluto. El diseño de un rectificador de onda completa de precisión es un poco más complicado que los tipos de polaridad única. Una forma de lograr este diseño es combinar las salidas de los circuitos de media onda negativa y positiva con un amplificador diferencial. Otra forma se muestra en la Figura\(\PageIndex{14}\).
Figura\(\PageIndex{13}\): Característica de transferencia para rectificación de onda completa.
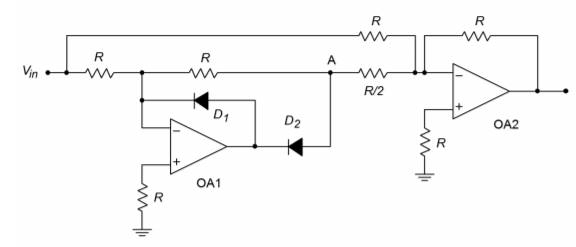
Figura\(\PageIndex{14}\): Rectificador de onda completa de precisión.
El rectificador de precisión del circuito\(\PageIndex{14}\) es conveniente ya que solo requiere dos amplificadores operacionales y que todas las resistencias (guardar una) tienen el mismo valor. Este circuito se compone de dos partes: un rectificador inversor de media onda y un amplificador sumador ponderado. La porción rectificadora se vuelve a dibujar en la Figura\(\PageIndex{15}\). Comencemos el análisis con esta porción.
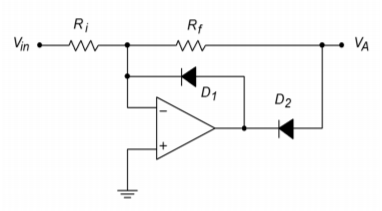
Figura\(\PageIndex{15}\): Rectificador inversor de media onda.
Primero, tenga en cuenta que el circuito se basa en un amplificador de voltaje inversor, con los diodos\(D_1\) y\(D_2\) sumado. Para señales de entrada positivas, la corriente de entrada intentará fluir a través\(R_f\), para crear una señal de salida invertida con una ganancia de\(R_f/R_i\). (Normalmente, la ganancia se establece en la unidad.) Debido a que la entrada inversora del amplificador operacional es más positiva que su entrada no inversora, el amplificador operacional intenta hundir la corriente de salida. Esto obliga a\(D_2\) encenderse, completando el bucle de retroalimentación, a la vez que obliga a\(D_1\) salir Al igual\(D_2\) que dentro del bucle de retroalimentación, se compensa su caída hacia adelante. Así, las señales de entrada positivas se amplifican e invierten como en un amplificador inversor normal.
Si la señal de entrada es negativa, el amplificador operacional intentará generar corriente. Esto se\(D_1\) enciende, creando una ruta para el flujo de corriente. Debido a que la entrada inversora está en tierra virtual, el voltaje de salida del amplificador operacional está limitado a la caída de 0.6 a 0.7 V de\(D_1\). De esta manera, el amplificador operacional no se satura; más bien, entrega la corriente requerida para satisfacer la demanda de origen. La polaridad de salida del amplificador operacional también se\(D_2\) desactiva, dejando la salida del circuito en una masa aproximada. Por lo tanto, para las señales de entrada negativas, la salida del circuito es cero. La combinación de las oscilaciones de entrada positiva y negativa crea una señal de salida rectificada de media onda invertida, como se muestra en la Figura\(\PageIndex{16}\). Este circuito se puede utilizar por sí solo como rectificador de media onda si es necesario. Su principal inconveniente es una impedancia de entrada algo limitada. En el lado positivo, debido a que el circuito no está saturando, puede resultar más rápido que el rectificador de media onda que se discutió primero.
Figura\(\PageIndex{16}\): Salida de rectificador de media onda.
El voltaje en el punto A de la Figura\(\PageIndex{14}\) es la salida del rectificador de media onda como se muestra en la Figura\(\PageIndex{16}\). Esta es una de las dos señales aplicadas al verano configuradas alrededor del amplificador operacional 2. La otra entrada al sumador es la señal de entrada del circuito principal. A esta señal se le da una ganancia de unidad, y a la señal de media onda se le da una ganancia de dos. Estas dos señales se combinarán como se muestra en la Figura\(\PageIndex{17}\) para crear una salida positiva de onda completa. Matemáticamente,
Para los primeros 180 grados:
\[ V_{out} =−K \sin \omega t+2 K \sin \omega t \nonumber \]
\[ V_{out} = K \sin \omega t \nonumber \]
Para los segundos 180 grados:
\[ V_{out} = K \sin \omega t+0 \nonumber \]
\[ V_{out} = K \sin \omega t \nonumber \]
Para producir un rectificador negativo de onda completa, simplemente invierta la polaridad de\(D_1\) y\(D_2\).
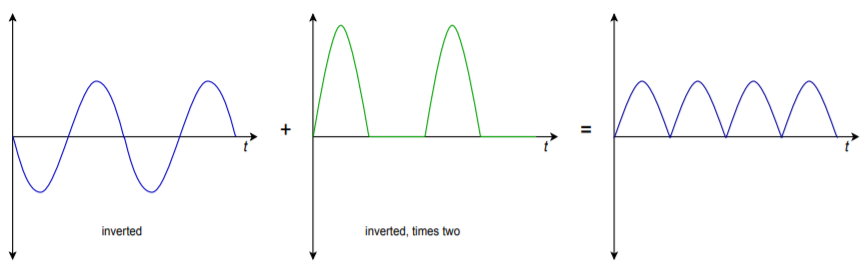
Figura\(\PageIndex{17}\): La combinación de señales produce salida.
Un ejemplo de aplicación de un rectificador basado en amplificador operacional se muestra en la Figura\(\PageIndex{18}\). Este circuito se utiliza para detectar sobrecargas peligrosas y fallas en un amplificador de potencia de audio. El recorte de señal a corto plazo puede no ser un problema grave en ciertas aplicaciones; sin embargo, el recorte a largo plazo puede crear condiciones muy estresantes para los altavoces. Este también sería el caso si un amplificador de potencia que funciona incorrectamente produjera un desplazamiento de CC. Desafortunadamente, una simple comparación a escala de las señales de entrada y salida del amplificador de potencia puede ser engañosa. Para comparar promedios a largo plazo, las señales de entrada y salida escaladas se rectifican de onda completa de precisión y luego se pasan a través de una etapa de detección de pico o promedio. Esto podría ser tan simple como una sola red RC. Estas señales son luego comparadas por la etapa de falla. Si hay una diferencia sustancial entre las dos señales, lo más probable es que el amplificador esté recortando la señal considerablemente o produciendo un desplazamiento de CC no deseado. La etapa de falla puede encender un LED de advertencia o, en casos severos, circuitos de apagado del sistema de disparo para evitar daños a otros componentes.
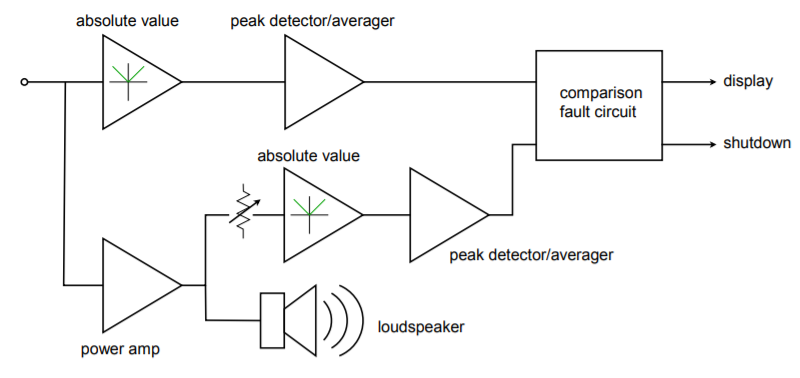
Figura\(\PageIndex{18}\): Detector de sobrecarga del amplificador de potencia.