17.1: Introducción
- Page ID
- 80790

Un sistema de vehículo guiado automatizado (AGV) puede transportar material entre un número finito de ubicaciones predefinidas en estaciones de trabajo con poca o ninguna asistencia humana. Barrett Electronics Corporation inventó el primer AGV del mundo para aplicaciones industriales en 1954. En Estados Unidos se han instalado más de 3 mil sistemas AGV durante los últimos 50 años. Estos sistemas van desde un vehículo hasta más de 100 vehículos.
Un sistema AGV consiste en vehículos que se mueven a lo largo de caminos predeterminados para mover cargas entre estaciones de trabajo y áreas de almacenamiento. Los vehículos operan sin necesidad de un operador o conductor a bordo, recogen las cargas en los puntos de recogida designados y las transportan a los puntos de entrega designados. Cada estación de trabajo tiene un punto de recogida y un punto de entrega. Estos dos puntos pueden ser iguales.
Hay varias categorías principales de vehículos:
- Vehículos Tipo Remolque que tiran de carros, remolques, plataformas rodantes y similares.
- Vehículos autónomos del tipo de carga unitaria que transportan productos en sus cubiertas de carga incorporadas.
- Vehículos tipo horquilla que utilizan un mecanismo de elevación de horquilla/mástil para interactuar con cargas en varias elevaciones.
- Vehículos más pequeños de Tipo Comercial/Oficina que tienen capacidades de menos de 500 libras.
- Vehículos de tipo portador pesado diseñados para transportar cargas grandes o muy pesadas como
troqueles, rollos, bobinas, lingotes que pesen más de 250 mil libras.
Los vehículos se mueven entre estaciones de trabajo atravesando segmentos de control. Cada segmento de control es relativamente corto. El punto de intersección entre los segmentos de control es un punto de control. Los puntos de recogida y entrega también son puntos de control.
Los vehículos en la mayoría de los sistemas existentes siguen una trayectoria de guía inductiva que consiste en un cable incrustado en el piso que transporta corriente alterna que induce un campo magnético detectado por una antena montada en la parte inferior de los vehículos. Otros mecanismos de control incluyen bandas magnéticas u ópticas montadas en superficie, así como guía inercial o láser. Los vehículos cuentan con controladores que responden a las instrucciones y garantizan la seguridad.
Los sistemas AGV deben ser capaces de realizar funciones de enrutamiento, control de tráfico y comunicaciones. El enrutamiento es el método mediante el cual un AGV determina cómo ir desde su ubicación actual a un destino designado. Se pueden implementar diferentes enfoques para la lógica de enrutamiento, como el tiempo más corto, la distancia más corta y el patrón fijo. El control de tráfico asegura que los AGV no colisionen entre sí. Se pueden utilizar distancias fijas o variables entre vehículos.
Se necesita comunicación entre vehículos, entre un vehículo y un dispositivo central o para interfaces locales. El mecanismo de comunicación proporciona los medios por los cuales los vehículos son informados de las decisiones de ruteo y control de tráfico.
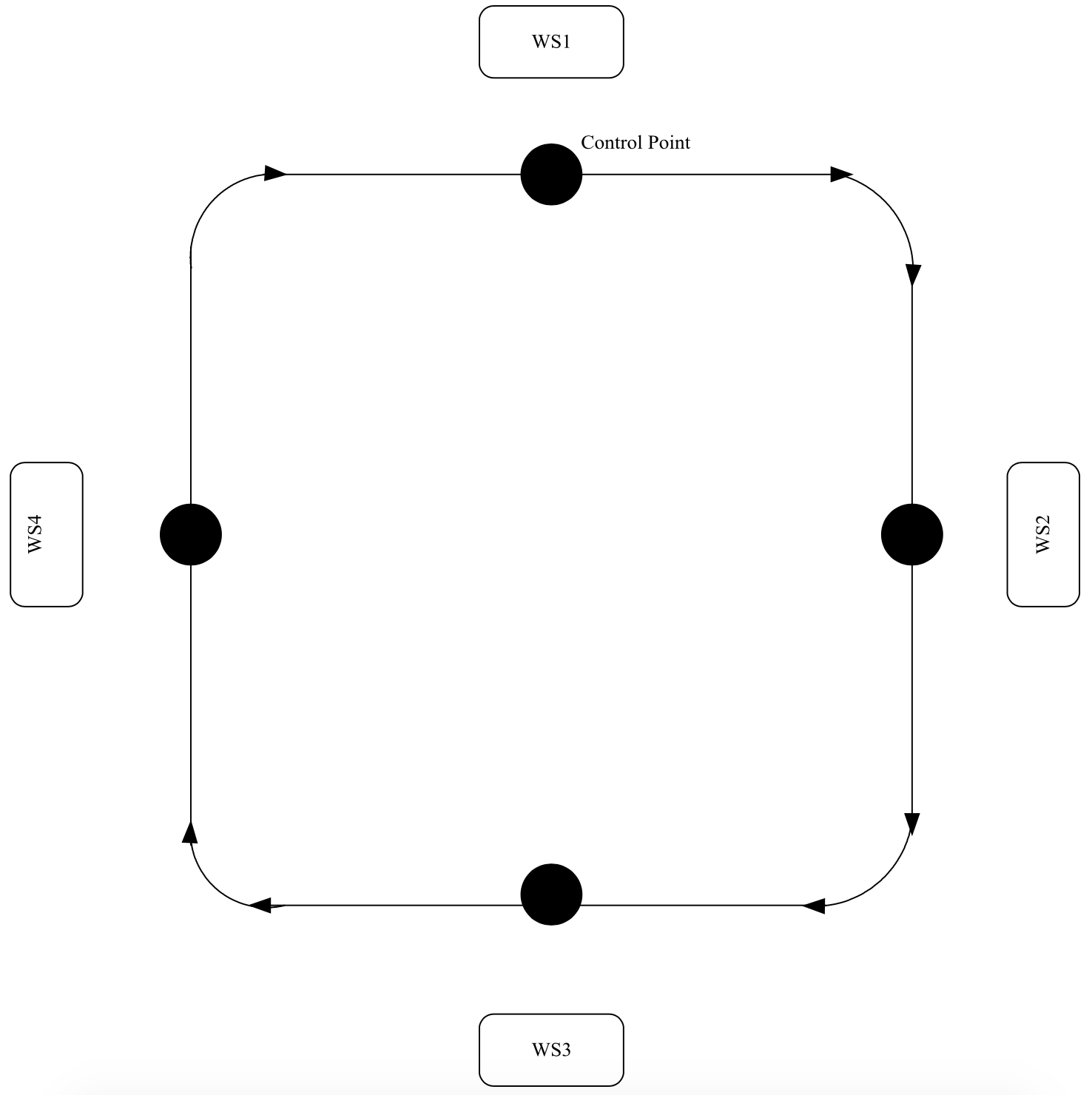
Un sistema AGV simple se muestra en la Figura 17-1. Hay cuatro segmentos de control que forman un bucle en la forma de un rectángulo con esquinas redondeadas. Las esquinas redondeadas permiten que el AGV continúe a toda velocidad en lugar de detenerse para hacer un giro de 90 grados como sería el caso si se usaran esquinas cuadradas. Hay cuatro estaciones cada una con su propio punto de control que indica el lugar donde se recogen o dejan las cargas. Los AGV se mueven en una sola dirección, en sentido horario, alrededor del bucle.
Llegan solicitudes para mover cargas de una estación de trabajo a otra. En respuesta, un AGV inactivo se mueve desde el área de estacionamiento hasta el punto de recogida de la estación de trabajo donde reside actualmente la carga. El AGV se mueve de este punto de recogida al punto de entrega de la estación de trabajo de destino. Después de la descarga, el AGV permanece inactivo en el punto de entrega.
Figura 17-1: Diseño AGVS simple