
18.1: Introducción
- Page ID
- 80792

La mayor parte del tiempo que el material está en una planta, se está moviendo o almacenando. En este capítulo se examina la dinámica de cómo un sistema automatizado de almacenamiento y recuperación (AS/RS) organiza y mantiene un inventario. Un sistema AS/RS brinda los siguientes beneficios: almacenamiento eficiente de materiales en el espacio, transporte controlado de materiales a alta velocidad y control de inventario en tiempo real. Por lo tanto, un sistema AS/RS ayuda a reducir los costos de inventario, mano de obra, espacio y control de materiales.
Un sistema AS/RS típico tiene varios componentes como se muestra en la Figura 18-1. Una máquina de almacenamiento/recuperación (S/R) coloca paletas (u otro portador estándar) que tienen uno o más tamaños estándar en un sistema de rack de gran altura. Un rack consiste en una matriz de ubicaciones de almacenamiento. Los racks están separados por pasillos. Hay una máquina S/R por pasillo. Una máquina S/R se mueve en dirección horizontal sobre una vía ubicada en el piso de un pasillo y se eleva verticalmente a través de un mecanismo embebido. Por lo general, la velocidad vertical es aproximadamente 1/3 de la velocidad horizontal.
Figura 18-1: Sistema Automático de Almacenamiento y Recuperación
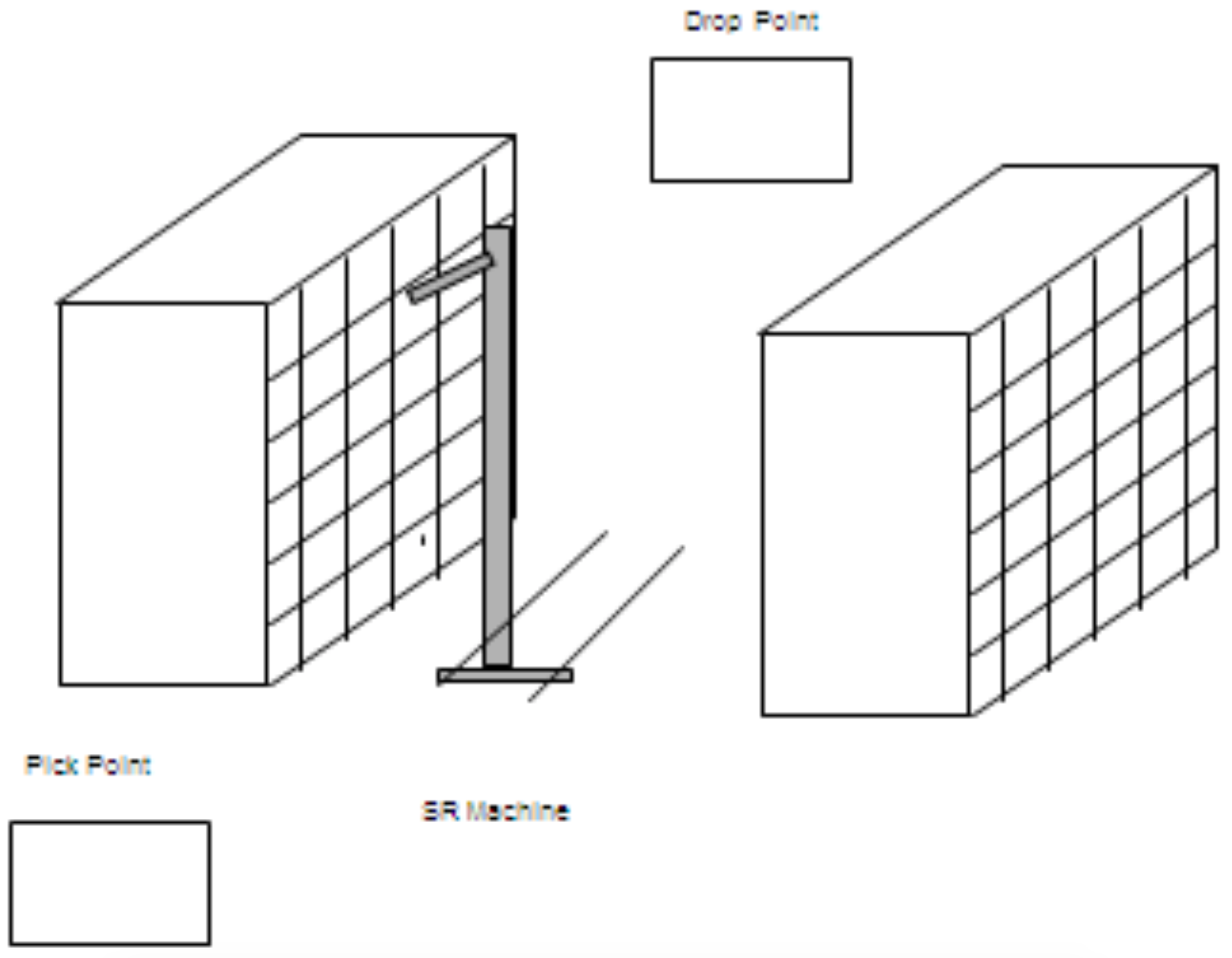
Los artículos a almacenar llegan a un punto de recogida. Los artículos recuperados son transportados por una máquina S/R a un punto de caída.
Un sistema de control basado en computadora es una parte importante de un sistema AS/RS. La computadora realiza un seguimiento de la ubicación exacta de todos los artículos en los racks. El sistema de control dirige el movimiento de la máquina S/R proporcionando instrucciones oportunas sobre qué artículos recuperar o almacenar en los racks. Estas instrucciones son en respuesta a solicitudes externas de almacenamiento y recuperación.
El sistema de control basado en computadora se puede probar mediante simulación. Se pueden evaluar tamaños de rack alternativos. Se pueden comparar diversas estrategias de almacenamiento y recuperación. De esta manera, se puede minimizar el movimiento de la máquina S/R cuando está vacía, así como la inversión de capital en racks.