
2.5: Modelado de Ruido - Ruido Blanco, Rosa y Marrón, Pops y Crackles
- Page ID
- 85611

Introducción
El ruido nos rodea en todo tipo de formas. En el uso común de la palabra, el ruido se refiere al sonido. Sin embargo, el ruido se puede considerar con mayor precisión como variaciones aleatorias que siempre están presentes en una o más partes de cualquier entidad, como voltaje, corriente o incluso datos. En lugar de pensar en el ruido solo como un término acústico, debería pensarse más como una señal aleatoria. El ruido puede ser las fluctuaciones inherentes en alguna parte de un sistema (es decir, la temperatura en un punto dado) o puede ser la interferencia inevitable en una medición de fuentes externas (es decir, las vibraciones de un generador cercano desdibujan las mediciones de un transductor de presión). La interferencia estática en su radio, la 'nieve' en su televisión y los picos no resueltos en un informe de espectroscopia infrarroja son todos ejemplos de ruido.
Los ingenieros químicos pueden usar propiedades estadísticas para caracterizar el ruido para que puedan comprender un proceso actual o desarrollar un proceso óptimo. Al caracterizar el ruido y determinar su origen, el ingeniero puede idear métodos para dar cuenta del ruido, controlar un proceso o predecir la trayectoria de un sistema. Por ejemplo, cuando los ingenieros químicos diseñan plantas, utilizan caracterizaciones de ruido para determinar el mejor esquema de control para cada proceso. El modelado matemático se puede utilizar para caracterizar y predecir el ruido de un sistema dado. En el modelado, para simplificar la representación de tendencias generales que vuelven a ocurrir, el ruido se clasifica en dos categorías principales: basado en frecuencia y no basado en frecuencia. El ruido basado en frecuencia consiste en los colores del ruido, y el ruido no basado en frecuencia incluye pops, broches y crujido.
El propósito de las siguientes secciones es darle una comprensión cualitativa de las fuentes de ruido y cómo se puede caracterizar y manejar. Se darán ejemplos para ayudarle a obtener una comprensión cuantitativa de cómo el ruido se relaciona con el control y modelado de procesos de ingeniería química.
Tipos generales de ruido
Se pueden clasificar tres tipos generales de ruido al describir un proceso, y son los siguientes:
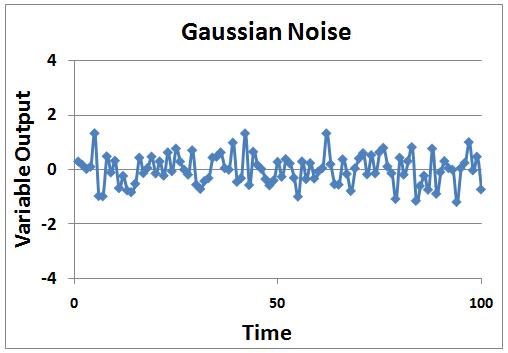
1) El ruido gaussiano generalmente no depende del tiempo, lo que significa que es aleatorio y no se planifica sistemáticamente. La amplitud de la frecuencia puede variar, haciendo una notación crepitante o sonido (ver #Crackles a continuación). Algunos ejemplos de ruido gaussiano pueden incluir salpicaduras en un tanque o interrupción no planificada en un dispositivo de detección.
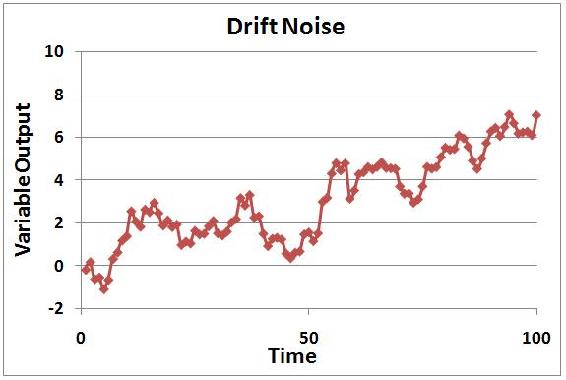
2) El ruido de deriva se correlaciona con el tiempo y tiene un movimiento aleatorio. Los ejemplos de ruido de deriva pueden incluir incrustaciones o decaimiento del catalizador, en el que la potencia de la sustancia puede disminuir con el tiempo a medida que se produce la descomposición. Las fluctuaciones del precio de las acciones también modelan algo así como el ruido
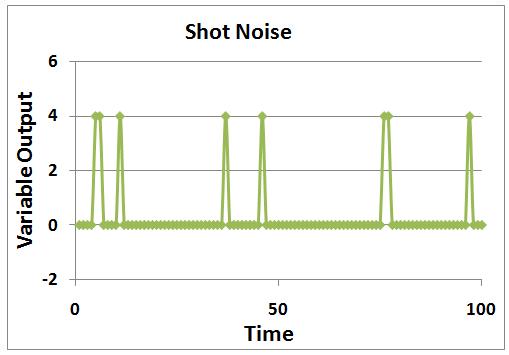
3) El ruido de disparo puede definirse como ráfagas esporádicas y cortas de ruido, en las que la amplitud es similar entre las ráfagas de ruido. El ruido de disparo se puede correlacionar con pops (ver #Pops a continuación), en el que en momentos aleatorios, se observa el mismo ruido de disparo con la misma amplitud. Ejemplos de ruido de disparo incluyen obstrucción parcial o atasco en el proceso en el que se verá la misma amplitud por el ruido cada vez que se produzca la obstrucción o atasco en el proceso. Otro ejemplo es la demanda del producto por parte de los clientes. Si el sistema de control (al intentar optimizarlo) depende del pedido del cliente, y la demanda del cliente no es consistente en todo momento (es decir, tiempos de inactividad para los pedidos) pero el monto del pedido es el mismo cuando se realizan los pedidos, entonces se verá afectada por el ruido de disparo descrito por el pedido del cliente (demanda del cliente).
Fórmulas de Microsoft Excel para 3 tipos de ruido
| Tipo de ruido | Fórmula Excel |
|---|---|
| Ruido gaussiano | = [Valor original] + RAND () - RAND () + RAND () - RAND () 1 |
| Ruido de deriva | = [Valor anterior] + RAND () - RAND () + RAND () - RAND () 1 |
| Ruido de tiro | = if (RAND () >0.9, [Valor original] + [error único], [Valor original]) |
1 Cuantos más ciclos de suma/resta de RAND () uses, más aproximación obtendrás para una distribución gaussiana
de errores aleatorios.
Como verías estos en un archivo Excel:
| \ | A | B | C | D |
|---|---|---|---|---|
| 1 | Tiempo | Ruido gaussiano | Ruido de deriva | Ruido de tiro |
| 2 | 1 | valor original | valor original | valor original |
| 3 | 2 | = $ B$2 + RAND () - RAND () + RAND () - RAND () | = C2 + RAND () - RAND () + RAND () - RAND () | = si (RAND () >0.9, $ D $2+ [valor de error único], $ D $2) |
| 4 | 3 | = $ B$2 + RAND () - RAND () + RAND () - RAND () | = C3 + RAND () - RAND () + RAND () - RAND () | = si (RAND () >0.9, $ D $2+ [valor de error único], $ D $2) |
Nota: Estas fórmulas se pueden extender por cualquier periodo de tiempo. Los periodos de tiempo más largos son útiles para visualizar el ruido de deriva.
Tipos Combinados de Ruido
Los sensores, procesos, demandas, etc. muchas veces no se comportan con simples modelos de ruido. Sin embargo, la mayor parte del ruido se puede derivar de los tres tipos generales de ruido. Un ejemplo de un proceso con ruido aleatorio y de disparo se muestra en la miniatura.
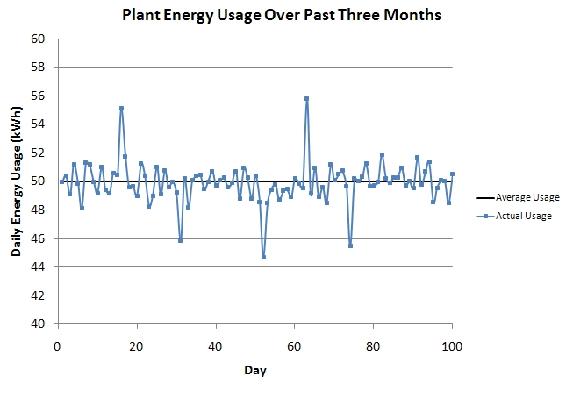
Esta es una gráfica del uso total diario de electricidad de una planta durante un período de operación normal. Como podemos ver, hay fluctuaciones menores que ocurren todos los días, pero algunos días hay grandes cambios en el uso de la electricidad. Estos grandes cambios pueden verse como ruido de disparo cuando el consumo se ve en esta escala diaria.
Las posibles razones de las fluctuaciones menores podrían deberse a que los calentadores eléctricos se encienden y apagan. Los cambios en el funcionamiento de bombas más pequeñas pueden provocar estos cambios en la demanda de electricidad.
Los disparos grandes podrían deberse a una parte del proceso que consume mucha energía que solo opera cuando es necesario. Los tiros positivos podrían deberse a que este proceso se activa y los tiros negativos podrían deberse a un gran proceso que arranca cuando no es necesario.
Con esta gráfica, podemos decir que hay ruido de disparo presente con los grandes cambios en el consumo, pero también hay ruido aleatorio presente con las fluctuaciones diarias menores. No diríamos que hay ruido de deriva presente porque el consumo se mantiene alrededor de un valor medio constante y no se aleja de ahí.
Sin embargo, el consumo total cuando se ve desde una escala diferente puede mostrar otras formas de ruido. Si vimos el uso horario de electricidad en uno de los días con ruido disparado, puede parecerse al ruido de deriva en la escala horaria.
Colores de Ruido
La primera categoría de ruido es el ruido basado en frecuencia, clasificado por los colores del ruido. Al entender los colores del ruido, necesitamos entender el proceso de convertir un conjunto dado de datos a un punto donde pueda clasificarse como algún color de ruido. La siguiente sección, “Ruido de modelado”, entra en más detalle en cuanto a cómo se hace esto. En este punto, es importante entender los principales colores de ruido que son posibles en un sistema. El ruido se clasifica por la densidad espectral, que es proporcional al recíproco de frecuencia (\(f\)) elevado a la potencia de beta. La densidad espectral de potencia (vatios por hercio) ilustra cómo la potencia (vatios) o la intensidad (vatios por metro cuadrado) de una señal varía con la frecuencia (hercios).
\[P S D \propto \frac{1}{f^{\beta}} \nonumber \]
w aquí\(β \ge 0\).
Al igual que los colores de la luz son discriminados por sus frecuencias, hay diferentes colores de ruido. Cada valor beta corresponde a un color de ruido diferente. Por ejemplo, cuando beta es igual a cero, el ruido se describe como blanco y cuando beta es igual a dos, el ruido se describe como marrón.
Ruido Blanco
Un tipo importante de ruido es el ruido blanco. Una característica definitoria de este tipo de ruido es que tiene una densidad espectral de potencia plana, lo que significa que tiene igual potencia en cualquier frecuencia. \(β\)es igual a cero para el ruido blanco.
El ruido blanco y la luz blanca tienen propiedades similares. La luz blanca consiste en todos los colores visibles en el espectro mientras que el ruido blanco se crea combinando sonidos en todas las frecuencias diferentes. El ruido blanco puro en todas las frecuencias no puede existir físicamente. Requiere una cantidad infinita de energía y toda la energía conocida es finita. El ruido blanco solo se puede crear dentro de un rango específico y definido de frecuencias. Nuevamente haciendo una analogía con la luz blanca, para una pequeña banda de frecuencias, la luz blanca visible tiene un espectro de frecuencia plano. Otra propiedad del ruido blanco es que es independiente del tiempo. Este factor también contribuye a la idea de que el ruido blanco no puede existir físicamente ya que es imposible que el ruido sea completamente independiente del tiempo.
A continuación se muestra un gráfico de densidad espectral de potencia de muestra de ruido blanco. Como se puede ver en el gráfico, la potencia sobre todas las frecuencias mostradas es esencialmente la misma, sugiriendo que el PSD es igual a 1.
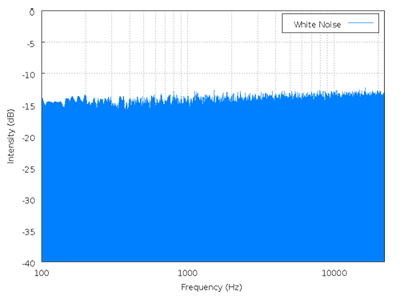
image from http://en.Wikipedia.org/wiki/White_noise on 9/18/2006
Es importante señalar que el ruido blanco no siempre es ruido gaussiano. Ruido gaussiano significa que la función de densidad de probabilidad del ruido tiene una distribución gaussiana, que básicamente define la probabilidad de que la señal tenga un cierto valor. Mientras que el ruido blanco simplemente significa que la potencia de la señal se distribuye equitativamente en el tiempo. Para el ruido blanco gaussiano se encuentra el número de mediciones mayor que la línea espectral de potencia como mediciones que son menores que la línea espectral de potencia con la mayoría cayendo en la línea espectral. El ruido blanco gaussiano se utiliza a menudo como modelo para el ruido de fondo en la comunicación por satélite. El ruido blanco también puede provenir de otras distribuciones, como en la distribución de Poisson. El ruido blanco poissoniano se verá como una distribución normal que se ha desplazado hacia la izquierda para un pequeño número de mediciones. Para mayor número de mediciones el ruido blanco poissoniano se verá como la distribución normal (también conocida como ruido blanco gaussiano). Un modelo de ruido blanco Poissoniano es útil para sistemas donde suceden cosas en cantidades discretas como los fotones que se transmiten o la cantidad de autos que pasan por una intersección.
Ruido Rosa
El ruido rosa es una señal cuya densidad espectral de potencia disminuye proporcionalmente a la inversa de la frecuencia, donde el valor β es igual a uno. Debido a su disminución en la potencia a frecuencias más bajas en comparación con el ruido blanco, el ruido rosado a menudo suena más suave y amortiguador que el ruido blanco.
El ruido rosado es en realidad lo que comúnmente se considera ruido blanco audible y es evidente en los circuitos eléctricos. El ruido rosado se vuelve importante para medir en cosas como las resistencias de composición de carbono, donde se encuentra como el exceso de ruido por encima del ruido térmico producido. A continuación se muestra una tabla de densidad espectral de potencia para Ruido rosa.
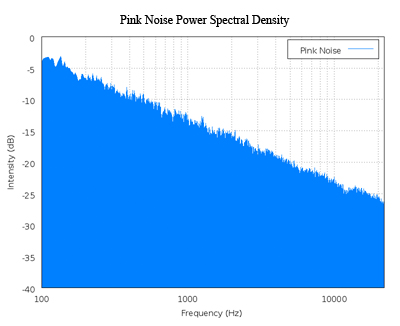
imagen de es.wikipedia.org/wiki/Pink_Noise el 18/09/2006
Ruido Marrón
Cuando\(β\) es igual a 2, el ruido es browniano. El ruido marrón es el ruido de señal creado por el movimiento browniano o aleatorio. Es una forma de interferencia inevitable en la transmisión de información y puede compararse con una caminata aleatoria que no tiene una trayectoria claramente modelada. El ruido marrón tiene más energía a frecuencias más bajas. En comparación con el ruido blanco o rosa, el ruido marrón es aún más suave y amortiguado. Se puede generar integrando ruido blanco. Las interferencias de fuentes externas, como las vibraciones de la maquinaria cercana o la luz de fondo, en las lecturas de los instrumentos suelen tener un patrón de ruido marrón.
A continuación se muestra una tabla de densidad espectral de potencia para el ruido marrón. De las tablas de ruido marrón y ruido rosa, se puede observar que el ruido marrón pierde potencia a medida que la frecuencia aumenta a un ritmo mucho más rápido que el del ruido rosado.
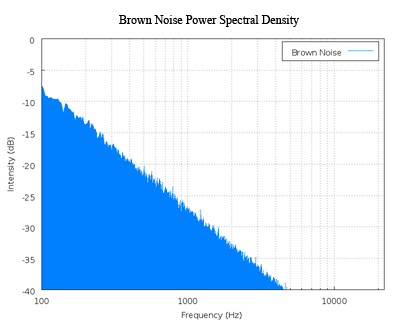
image from http://en.Wikipedia.org/wiki/Brown_noise on 9/18/2006
Ruido Azul
El ruido azul es una señal cuya densidad espectral de potencia aumenta proporcionalmente a la frecuencia, donde el valor β es igual a uno negativo. Un ejemplo de sería una reacción reversible, exotérmica, discontinua donde los productos se están acumulando a una velocidad constante global, pero la reacción inversa ocurre cuando la temperatura llega a ser demasiado alta. Por lo tanto, en general está aumentando en el producto, pero tiene pequeñas fluctuaciones a medida que aumenta. A continuación se muestra un gráfico de densidad espectral de potencia para el ruido azul.
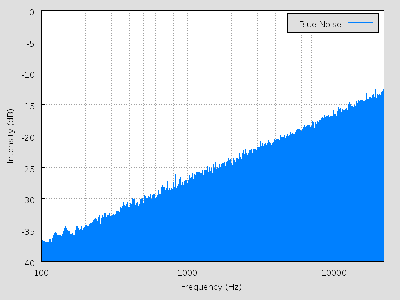
imagen de es.wikipedia.org/wiki/Blue_noise #Blue_noise el 11/12/2008
Ruido Morado
Cuando β es igual a -2, el ruido es violeta. El ruido púrpura tiene más energía a frecuencias más altas. Se puede generar diferenciando el ruido blanco. A continuación se muestra una tabla de densidad espectral de potencia para el ruido púrpura. A partir de los gráficos de ruido púrpura y ruido azul, se puede observar que el ruido púrpura gana potencia a medida que aumenta la frecuencia a una velocidad mucho más rápida que la del ruido azul.
Modelado de Colores de Ruido
Caracterizar las señales ruidosas es importante para un ingeniero químico para que pueda determinar las fuentes de ruido y cómo contabilizarlo. En ocasiones, el ruido será una característica del sistema. En estos casos, el sistema no puede tener un control muy sensible ya que si el sensor para el dispositivo controlador es demasiado sensible, responderá al ruido de su sistema y terminará controlando su sistema de una manera ruidosa. Otras veces, el ruido será de perturbaciones inevitables al sistema. En estos casos, el ruido puede ser amortiguado o contabilizado de manera apropiada.
Para aplicar el conocimiento de los colores del ruido necesitamos entender el proceso de convertir un conjunto dado de datos a un punto donde pueda clasificarse como algún color de ruido. Sigue el proceso general de clasificación del ruido.
 Curva de datos para ajustar datos Potencia de transformada de Fourier Densidad espectral Clasificación del color del ruido
Curva de datos para ajustar datos Potencia de transformada de Fourier Densidad espectral Clasificación del color del ruido
La clasificación del color del ruido se vuelve importante cuando necesitamos tener una estimación de datos futuros. En otras palabras, dadas las tendencias en nuestros datos actuales podemos utilizarlos para estimar datos futuros. Esto se hace de la siguiente manera,
Ruido Color Potencia Densidad espectral Curva de transformada de Fourier Generar datos a partir
La potencia de una señal de ruido se detecta a cierta frecuencia. Entonces se puede construir una gráfica del log (potencia) vs. el log (frecuencia), y la pendiente de la línea da el valor beta. Siguiendo un proceso de pensamiento hacia atrás, se puede producir un cierto color de ruido creando componentes de frecuencia que tienen un valor generado por una distribución gaussiana y luego escalando por la potencia beta apropiada de frecuencia.
A continuación se explica un método general para caracterizar y modelar el ruido.
1. DATOS
Los datos son lo que transmite la señal. La señal depende de lo que estés midiendo o modelando. Los datos se pueden recopilar, por ejemplo, si estás midiendo la temperatura en un reactor, entonces tus datos son las lecturas de temperatura de un termopar en una determinada posición en el reactor durante un periodo de tiempo.
2. CURVAS
Después de recopilar los datos, trazar los datos y encontrar una ecuación que mejor se ajuste ,, para ese conjunto de datos. Un programa de matemáticas se puede utilizar para encontrar una ecuación que mejor se ajuste. Microsoft Excel se puede utilizar para un modelo simple y programas como Polymath o Mathematica se pueden utilizar para modelos más complejos. Una ecuación simple podría estar en forma de
,, para ese conjunto de datos. Un programa de matemáticas se puede utilizar para encontrar una ecuación que mejor se ajuste. Microsoft Excel se puede utilizar para un modelo simple y programas como Polymath o Mathematica se pueden utilizar para modelos más complejos. Una ecuación simple podría estar en forma de . Los coeficientes A y B se pueden variar para ajustarse a los datos. Se pueden agregar términos adicionales para un modelado más preciso de datos complejos. La ecuación que encuentre se puede utilizar para predecir y modelar el ruido de señal futuro.
. Los coeficientes A y B se pueden variar para ajustarse a los datos. Se pueden agregar términos adicionales para un modelado más preciso de datos complejos. La ecuación que encuentre se puede utilizar para predecir y modelar el ruido de señal futuro.
3. Transformadas de Fourier
Una transformada de Fourier es una herramienta utilizada para convertir sus datos en una función de . De esta forma, el ruido se puede caracterizar más fácilmente. Aplicar una transformada de Fourier a la curva,, se ajusta a sus datos para generar una relación para la densidad espectral de potencia. La transformada de Fourier puede ser realizada por una computadora dependiendo de la complejidad de (o vea “Simplificando la Transformada de Fourier” a continuación). La transformación es la integral que se muestra a continuación.
. De esta forma, el ruido se puede caracterizar más fácilmente. Aplicar una transformada de Fourier a la curva,, se ajusta a sus datos para generar una relación para la densidad espectral de potencia. La transformada de Fourier puede ser realizada por una computadora dependiendo de la complejidad de (o vea “Simplificando la Transformada de Fourier” a continuación). La transformación es la integral que se muestra a continuación.
\[X(w)=\int_{-\infty}^{\infty} x(t) e^{-j w t} d t \nonumber \]
donde;
- es la ecuación de la curva para ajustar los datos.
 es la forma exponencial de escribir la relación
es la forma exponencial de escribir la relación . La j en el segundo término aquí indica que ese término es imaginario.
. La j en el segundo término aquí indica que ese término es imaginario.  es la frecuencia
es la frecuencia
4. Densidad espectral de potencia
Este valor se logra simplificando y elevando al cuadrado la Transformada de Fourier. Dado que las series de simplificaciones necesarias son bastante complejas, la ecuación de densidad espectral de potencia resultante se muestra a continuación.
\[P S D=\sqrt{\left(\sum x(t) \cos (w t)\right)^{2}+\left(\sum x(t) \sin (w t)\right)^{2}} \nonumber \]
En este punto alcanzamos un valor numérico para el PSD a la frecuencia particular,. Estos valores PSD numéricos se pueden trazar versus frecuencia para obtener el gráfico PSD.
5. CLASIFICACIÓN DE RUIDO
La suma se repite una y otra vez para diferentes frecuencias,. Se realiza una gráfica del PSD vs frecuencia, con estos valores. Una vez hecho esto, se aplica una línea de mejor ajuste a los puntos de datos que le dará la relación de caracterización . En base a esto podemos entonces clasificar el ruido como un color de ruido.
. En base a esto podemos entonces clasificar el ruido como un color de ruido.
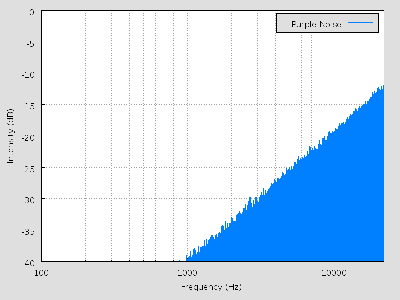
imagen de es.wikipedia.org/wiki/Violet_noise #Violet_noise el 11/12/2008
PROCESO REVERSO
Saber convertir datos a un color de ruido es solo la mitad del problema. ¿Y si sabemos qué tipo de ruido es posible y necesitamos datos del mismo para un proceso dado? Conocer el color del ruido significa que conocemos la relación de densidad espectral de potencia con la frecuencia. A partir de aquí seguimos la ruta inversa como la que se toma para llegar al color del ruido usando la transformada inversa de Fourier en su lugar.
Transformada Inversa de Fourier
\[x(t)=\frac{1}{2 \pi} \int_{-\infty}^{\infty} X(w) e^{j w t} d t \nonumber \]
donde;
- es la ecuación de la curva para producir futuros datos.
 es la forma exponencial de escribir la relación
es la forma exponencial de escribir la relación . La j en el segundo término aquí indica que ese término es imaginario.
. La j en el segundo término aquí indica que ese término es imaginario. - es la frecuencia
Podemos usarlo para producir una curva o, haciendo una simplificación similar a la que hicimos para la transformada de Fourier, para generar datos directamente. Este proceso inverso debería ser trivial para alguien que trabajó a través del proceso hacia adelante.
Pops, broches y crujidos
La segunda categoría de ruido es el ruido no basado en frecuencia. Tres ejemplos de este ruido sin frecuencia son los pops, los chasquidos y los crujidos. El estudio de estos tipos de ruido es bastante nuevo, y no se sabe mucho sobre cómo lidiar con ellos cuando surgen en nuestras investigaciones o estudios. Sin embargo, uno puede distinguir y clasificar con éxito estos tipos de ruido al notar ciertas propiedades que son típicas de ellos.
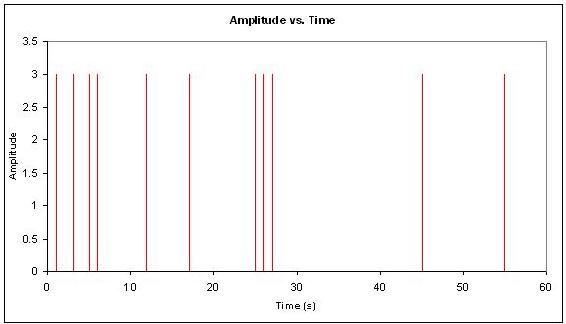
Pops
En un extremo del extremo del ruido sin frecuencia es lo que se define como pops. Los pops son picos aleatorios poco frecuentes en el ruido de aproximadamente la misma amplitud. Un ejemplo de esto sería un cable suelto que suele estar completando el circuito. Sin embargo, se desconecta aleatoriamente por una fracción de segundo y luego vuelve a completar el circuito para un funcionamiento normal. Los procesos de ingeniería química pueden tener inherentemente estallidos que son impredecibles. Se pueden agregar características de seguridad a un proceso, como válvulas de alivio de presión, para manejar los estallidos cuando ocurren. La siguiente es una imagen de cómo podrían verse los pops en un sistema:
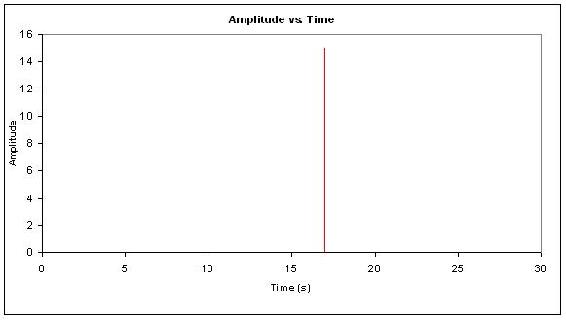
Snaps
En el otro extremo del espectro de ruido sin frecuencia hay broches. Los Snaps son eventos independientes individuales que ocurren solo una vez. Cuando un lápiz se dobla y se rompe bajo la fuerza es un ejemplo de chasquido. Otro ejemplo sería el chasquido de un trozo de tiza o la explosión de una bomba. El “reventar” de los nudillos de uno es realmente chasquear ya que es un evento independiente, a menos que te chasquees todos los nudillos de una vez o uno tras otro muy rápido. Al igual que los pops, los broches son impredecibles y se deben agregar características de seguridad al sistema para manejar los broches. El siguiente es un ejemplo de un snap:
Crackles
Entre reventar y chasquear hay crujidos. Un ejemplo muy común para el crujido es el sonido que se escucha proveniente de un trozo de madera en llamas. Al igual que el reventón, hay una falta de frecuencia o irregularidad en la que se producen los crujidos. Además, también hay una irregularidad de la amplitud del crujido. En el caso del incendio, no sólo no se puede predecir cuándo se escucharía el crujido, sino que tampoco se puede predecir qué tan fuerte será. Además, existe una condición de universalidad asociada con el crujido. Independientemente de la escala, se debe observar la aleatoriedad similar en repetición y amplitud.
Al hacer frente a esta condición de universalidad surge el concepto de exponente crítico. Por ejemplo, si estamos viendo el mismo efecto crepitante,\(S\), a lo largo de un periodo de tiempo mayor los dos tendrían que ser iguales después de escalar el mayor.
\[\langle S \rangle_{\text {small}}(T)=A\langle S \rangle_{\text {large}}\left(\frac{T}{B}\right) \nonumber \]
para algunos factores de escalado y
y .
.
donde\(\langle S \rangle\) es S promedio.
Si la escala de tiempo se expande por un factor pequeño\(B=\left(\frac{1}{(1-\delta)}\right)\) entonces la reescalación del tamaño también será pequeña, digamos\(1+a \delta\).
\[\langle S \rangle(T)=(1+a \delta) *\langle S \rangle(1+\delta T) \nonumber \]
Para pequeños\(\delta\) tenemos
\[a\langle S \rangle=T \frac{d\langle S \rangle}{d T} \nonumber \]
Resolver da
\[\langle S \rangle(T)=S_{o} T^{a} \label{eq20} \]
El exponente\(a\) se llama exponente crítico y es una predicción universal de una teoría dada. Existen otros conceptos que se utilizan como comprobación de la universalidad para momentos en los que no se puede utilizar el exponente crítico pero el más común es el exponente crítico. El siguiente es un ejemplo de cómo podría verse un crujido en un sistema:
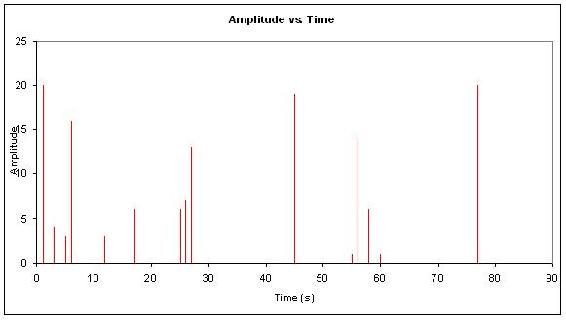
Un ingeniero principal que monitorea el caudal instantáneo de un refrigerante utilizado para enfriar un reactor exotérmico recopila el conjunto de datos 'a' durante un período de 30 horas. Posteriormente esa semana recoge el conjunto de datos 'b' para el mismo caudal de refrigerante. Para ambos conjuntos de datos determinó que la forma en que el caudal instantáneo de refrigerante está reaccionando al reactor exotérmico es óptima para el proceso de reacción. Para sus registros le gustaría representar el ruido en los datos de forma compacta. Él quiere que primero caracterices el ruido y luego brindes cualquier otra información, lo que generalizará la tendencia en los datos. Una vez que haya completado estas tareas, repórtese a él.
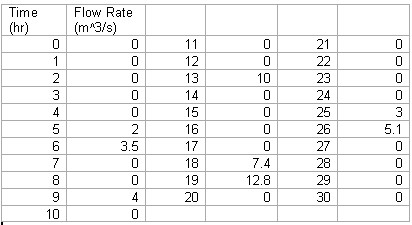
Conjunto de datos 'a'
Obsérvese que entre 0 y 30hr para todos los intervalos de tiempo no representados en esta tabla hay un cero asignado como caudal instantáneo.
Conjunto de datos 'b'
Obsérvese que entre 0 y 50hr para todos los intervalos de tiempo no representados en esta tabla hay un cero asignado como caudal instantáneo.
Solución
Cada conjunto de datos se grafica, Caudal vs Tiempo. Los dos gráficos muestran tendencias crepitantes.
Gráfica para conjunto de datos 'a'
Gráfica para conjunto de datos 'b'
Al observar esto, la tendencia general del ruido es crepitante. Para proporcionar una prueba final aplicamos la relación de universalidad (Ecuación\ ref {eq20}).
Primero determinamos el exponente crítico,\(a\), para el conjunto de datos a.
Vemos eso;
\[<S>=1.54 \nonumber \]
\[\\ S_0 = 2 \nonumber \]este valor puede ser el primer valor alcanzado o un promedio de los primeros 2 o 3 valores.
\[T=30\nonumber \]
Resolviendo para el exponente crítico usando la relación dada anteriormente obtenemos;
\[a=-0.08\nonumber \]
Una vez más realizamos el mismo cálculo para el conjunto de datos 'b'.
\[<S>=2.12\nonumber \]
\[\\ S_0 = 3 \nonumber \]este valor puede ser el primer valor alcanzado o un promedio de los primeros 2 o 3 valores
\[T=50\nonumber \]
Resolviendo para el exponente crítico usando la relación dada anteriormente obtenemos;
\[a=-0.08\nonumber \]
La similitud de los dos exponentes críticos da una prueba adicional de que los datos del caudal instantáneo del refrigerante durante un período de tiempo mostrarán crepitación.
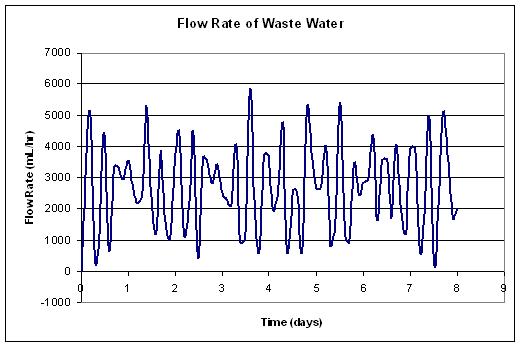
Un ingeniero químico está leyendo los caudales del medidor de flujo. Cada 0.1 días durante 8 días se tomó una lectura y los datos se dan aquí: Colores de Ruido Ejemplo. Los datos muestran las fluctuaciones del caudal establecido de 3000 litros por hora en una planta de tratamiento de aguas residuales. Las especificaciones para la planta dicen que el caudal máximo es de 6000 litros por hora, o las tuberías estallarán. Además, el caudal no puede caer por debajo de los 200 litros por hora, o el sistema se apagará automáticamente.
El ingeniero químico nota que hubo algunas lecturas cercanas a estos límites. Es trabajo del ingeniero químico determinar si las lecturas son caudales precisos o si hay un error con el medidor de flujo. Al caracterizar el tipo de ruido, el ingeniero químico puede determinar la fuente del ruido y así tomar las medidas preventivas adecuadas. ¿Qué tipo de ruido está presente y qué medidas de protección se deben tomar?
Solución
1) Datos de la trama. A partir de los datos presentados, se graficó un diagrama de caudal vs tiempo para medir el grado de fluctuación en el caudal.
2) Calcular los datos de densidad espectral de potencia. Utilizando la integral simplificada derivada para calcular la densidad espectral de potencia, se creó una tabla con los valores PSD resultantes a frecuencias variables. Estas frecuencias fueron autodefinidas y fueron elegidas para abarcar un amplio rango. Cálculos más detallados se pueden encontrar aquí: Colores de Ruido Ejemplo bajo la hoja de trabajo titulada “PSD CALC”.
3) Trazar la densidad espectral de potencia. La densidad espectral de potencia para cada frecuencia se representó luego frente a la frecuencia, creando la gráfica de densidad espectral de potencia que se muestra a continuación.
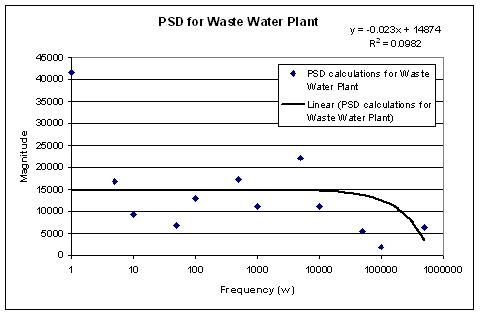
4) Caracterizar el ruido. Para determinar el valor β para los datos, se tomó una línea de tendencia lineal sobre los datos. Esta línea de tendencia se puede ver en la gráfica de densidad espectral de potencia anterior. La pendiente de esta línea de tendencia es el valor β para los datos. En este caso, el β=0.023. Dado que este valor no es el del ruido blanco (β=0) ni el del ruido rosado (β=1), podemos decir que este ruido está en algún lugar entre el ruido blanco y el rosado.
5) Determinar la fuente de ruido.
Hay dos posibles fuentes principales de ruido. Son el movimiento líquido en la tubería y el ruido en el caudalímetro causado por sí mismo o por fuentes externas. Dado que se encuentra antes que β=0.023, la fuente de ruido es probablemente del medidor de flujo. No es por el movimiento del líquido en la tubería porque el movimiento del líquido tiende a producir ruido marrón (β=2).
6) Medidas de protección que se puedan tomar. Sabiendo esto, se puede hacer una corrección en los cálculos para determinar el caudal real. Una solución completa paso a paso también se puede encontrar aquí: Ejemplo de Colores de Ruido bajo la hoja de trabajo titulada “Solución”.
Resumen
El ruido nos rodea y es una característica inevitable de las señales de monitoreo. Cuando el ruido se basa en la frecuencia, como los colores del ruido, se puede caracterizar y modelar usando herramientas matemáticas. Cuando el ruido no se basa en la frecuencia, como pops, chasquidos y crujidos, se puede reconocer, pero aún se están ideando formas de modelarlo. Caracterizar y modelar el ruido es importante para que los ingenieros químicos manejen con precisión sus datos, controlan los procesos y predicen tendencias futuras.
Referencias
- Kosko, Bart. “El ruido blanco no es tan blanco”, Ruido. ISBN 0670034959
- Ziemer, Rodger E. Elementos de Ingeniería Probabilidad y Estadística, New Jersey: Prentice Hall. ISBN 0024316202
- Papoulis, Atanasio. Probabilidad, variables aleatorias y procesos estocásticos, Nueva York: McGraw — Hill Book Company. ISBN 0071199810
- Peebles, Peeton Z. Jr. Probabilidad, variables aleatorias y principios de señales aleatorias, Nueva York: McGraw — Hill, Inc. ISBN 0071181814
- Sethna, James P. Ruido crepitante, Naturaleza 410, 242-250 (2001). También disponible aquí.
- es.wikipedia.org
Colaboradores y Atribuciones
- Autores: Danesh Deonarain, Georgina Mang, Teresa Misiti, Carolyn Ehrenberger
- Fecha de presentación: 08 de septiembre de 2006 Fecha de revisión: 19 de septiembre de 2006