
8.3: Optimización no lineal
- Page ID
- 85410

Diversas condiciones y situaciones no se describen adecuadamente utilizando sistemas lineales. En este caso, se puede aplicar la optimización no lineal. A diferencia de la optimización lineal, la condición de funcionamiento óptima no existe en los límites.
Optimización cuadrática
\[f(x)=c-x^{T} b+\frac{1}{2} x^{T} A x\nonumber \]
Para optimizar, es necesario encontrar cuando el gradiente de f es igual a cero.
\[\nabla f(x)=0\nonumber \]
\[\nabla f(x)=b-A x\nonumber \]
\[x_{*}=A^{-1} b\nonumber \]
Puede ser posible resolver lo óptimo mediante una ecuación lineal, aproximada por una serie de Taylor.
mediante una ecuación lineal, aproximada por una serie de Taylor.
\[f\left(x_{*}\right)=f(x)+\left(x_{*}-x\right)^{\prime} \nabla f(x)+\frac{1}{2}\left(x_{*}-x\right)^{\prime} \nabla \nabla f(x)\left(x_{*}-x\right)+\ldots\nonumber \]
Métodos iterativos
Cuando los métodos directos no pueden resolver la ecuación (es decir, A no es simétrico positivo definido), los métodos iterativos son posibles [1].
Al comenzar con una suposición inicial de , un algoritmo puede conducir a una
, un algoritmo puede conducir a una que satisfaga mejor la ecuación. A través de la iteración, teóricamente,
que satisfaga mejor la ecuación. A través de la iteración, teóricamente, .
.
Aplicaciones
- Finanzas: Optimización de cartera
- Empresas: Optimizar inventario
- Ingeniería: Dinámica del cuerpo rígido
- Bioquímica: Modelado cinético [2]
Ejemplo: Curvas 3D no lineales típicas
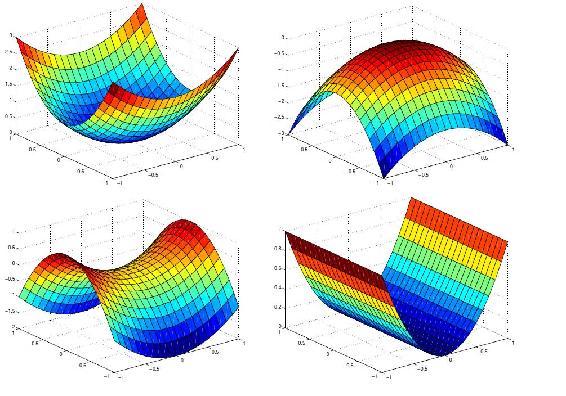
(Imagen de [1])
Como se observó, la condición óptima no existe necesariamente en el límite de la curva.
Ejemplo: Optimización cuadrática
\[f(x)=\vec{c}^{T} \vec{x}+\frac{1}{2} \vec{x}^{T} Q \vec{x}\nonumber \]
donde
\[\vec{c}^{T}=\left(c_{1}, c_{2}, \ldots, c_{n}\right)\nonumber \]
\[\vec{x}^{T}=\left(x_{1}, x_{2}, \ldots, x_{n}\right)\nonumber \]
Para un sistema cuadrático\(n=2\), así,\(Q\) (el término cuadrático constante) se define como una matriz simétrica de la siguiente manera.
\ [Q=\ left [\ begin {array} {ll}
Q_ {1} & Q_ {3}\\
Q_ {3} & Q_ {2}
\ end {array}\ derecha]\ nonumber\]
Por lo tanto, multiplicando el\(f\),
\[f(x)=\left(c_{1} x_{1}+c_{2} x_{2}\right)+\frac{1}{2}\left(Q_{1} x_{1}^{2}+2 Q_{3} x_{1} x_{2}+Q_{2} x_{2}^{2}\right)\nonumber \]
Referencias
- Lippert, Ross A. “Introducción a la optimización no lineal”. D.E. Shaw Research, 25 de febrero de 2008. http://www.mit.edu/~9.520/spring08/Classes/optlecture.pdf
- Mendes, Pedro y Kell, Douglas B. “Optimización no lineal de vías bioquímicas: aplicación a la ingeniería metabólica y estimación de parámetros”. Revista de Bioinformática, Tomo 14, 869-883. 1998.
- “Introducción a la optimización no lineal”. Laboratorio de Realización de Sistemas del Instituto Tecnológico de Georgia. www.Srl.Gatech.edu/Education/ME6103/NLP-Intro.ppt