
9.1: Construcción de diagramas de bloques- Visualización de mediciones de control
- Page ID
- 85572

A menudo es conveniente expresar un sistema de control con un diagrama de bloques. Estos diagramas ayudan a visualizar las relaciones entre cada parte del sistema de control (Figura\(\PageIndex{1}\)).
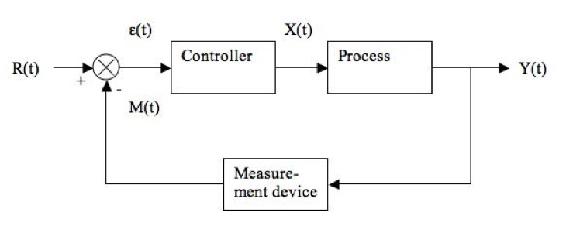
El sistema de control mostrado se denomina sistema de bucle cerrado o sistema de retroalimentación porque el valor medido de la variable controlada se devuelve o “retroalimenta” al comparador. En el comparador la variable controlada se compara con el valor o punto de ajuste deseado. Si hay alguna diferencia entre la variable medida y el punto de ajuste, se genera un error. Este error ingresa a un controlador, que a su vez ajusta el elemento de control final para devolver la variable controlada al punto de ajuste [1].
- R (t) = “punto de ajuste”, es sinónimo del valor deseado de la variable controlada
- ε (t) = error de proceso o comparador
- X (t) = variable de proceso
- M (t) = variable de medición
- Y (t) = variable de salida
El “hat” por encima de la G indica que es un operador (no una simple función) y puede incluir integración y diferenciación. Así, no se puede dividir por a , sino que hay que multiplicar ambos lados por su inversa
, sino que hay que multiplicar ambos lados por su inversa (ver más abajo). Esta es una representación más general que forma la transformación estándar de Laplace; aquí no es necesario que los operadores sean lineales.
(ver más abajo). Esta es una representación más general que forma la transformación estándar de Laplace; aquí no es necesario que los operadores sean lineales.
A partir del diagrama de bloques se pueden construir las ecuaciones para un sistema. Defina lo siguiente:
 =Operador del controlador
=Operador del controlador =Operador de proceso
=Operador de proceso =Operador de retardo de medición
=Operador de retardo de medición
Las ecuaciones para el sistema en la Figura\(\PageIndex{1}\) se dan a continuación. Tenga en cuenta que estas ecuaciones siempre se escriben como “la salida es igual al operador aplicado a la entrada”.
- Proceso:
- Controlador:
- Comparador: ε (t) = R (t) − M (t)
- Retraso de medición:

Típicamente para trazar la respuesta del controlador\(Y(t)\),, es necesario resolver estas ecuaciones para obtener una sola ecuación para\(Y(t)\). Esto se puede hacer enchufando primero la ecuación de retardo de medición en la ecuación del compartidor, o.
\[\epsilon(t)=R(t)-\hat{G}_{m} Y(t).\nonumber \]
Esta ecuación se puede poner en la ecuación del controlador, o
\[X(t)=\hat{G}_{c}\left[R(t)-G_{m} Y(t)\right].\nonumber \]
Finalmente, la ecuación para se\(Y(t)\) puede obtener poniendo la ecuación anterior en la ecuación para el proceso, o
\[Y(t)=\hat{G}_{p} \hat{G}_{c}\left[R(t)-\hat{G}_{m} Y(t)\right].\nonumber \]
Frecuentemente tenemos una ecuación diferencial para\(X(t)\) en términos de derivados de\(Y(t)\) por lo que escribimos
\[X(t)=\hat{G}_{p}^{-1} Y(t)\nonumber \]
lo que implica la forma de la ecuación general
\[\hat{G}_{p}^{-1} Y(t)=\hat{G}_{c}\left[R(t)-G_{m} Y(t)\right]\nonumber \]
Si se conocen los operadores de proceso, controlador y retardo de medición, se\(Y(t)\) puede trazar y se puede observar la respuesta del sistema (es decir, usando Mathematica).
Es decir, tenemos
- \(Y(t)=\hat{G}_{p} X(t)\)
- \(X(t)=\hat{G}_{c} \epsilon(t)]\)
- \(\epsilon(t)=R(t)-M(t)\)
- \(M(t)=\hat{G}_{m} Y(t)\)
- \(\hat{G}_{p}^{-1} Y(t)=\hat{G}_{c}\left[R(t)-G_{m} Y(t)\right]\)
Suponga que no hay retraso de medición:
\[\hat{G}_{m}=1\nonumber \]
Asumir sistema de primer orden:
\[\hat{G}_{p}^{-1}=\frac{1}{K_{p}}\left(\tau_{p} \frac{d}{d t}+1\right)\nonumber \]
Supongamos controlador PI:
\[\hat{G}_{c}^{-1}=K_{c}+\frac{K_{c}}{\tau_{I}} \int_{0}^{t} d t\nonumber \]
Sustituir las ecuaciones (2) y (3) en (5) da:
\[\frac{1}{K_{p}}\left(\tau_{p} \frac{d}{d t} \quad 1\right) Y(t)=\left(K_{z}, \frac{K_{e}}{_{\eta_{1}}} \int_{0}^{t} a t\right) c(t)-\left(K_{z} | \frac{K_{c}}{_{7_{1}}} \int_{0}^{t} d t\right)\{H(t) \quad Y(t)\nonumber \]
Simplificar aún más da:
\[\tau_{p} Y^{\prime}(t)+Y(t)=K_{c}(R(t)-Y(t))+\frac{K_{c}}{\tau_{I}}(R(t)-Y(t))\nonumber \]
Diferenciar la ecuación anterior da:
\[\tau_{p} Y^{\prime \prime}(t)+Y^{\prime}(t)=K_{c} R^{\prime}(t)-K_{c} Y^{\prime}(t)+\frac{K_{c}}{\tau_{I}} R(t)-\frac{K_{c}}{\tau_{I}} Y(t)\nonumber \]
Reordenando la ecuación anterior:
\[\tau_{p} Y^{\prime \prime}(t)+\left(1+K_{c}\right) Y^{\prime}(t)+\frac{K_{c}}{\tau_{I}} Y(t)=K_{c} R^{\prime}(t)+\frac{K_{c}}{\tau_{I}} R(t)\nonumber \]
Multiply the above equation by  to eliminate the co-efficient of \(Y'(t)\) gives:
to eliminate the co-efficient of \(Y'(t)\) gives:
\[\frac{\tau_{I} \tau_{p}}{K_{c}} Y^{\prime \prime}(t)+\tau_{I} \frac{1+K_{c}}{K_{c}} Y^{\prime}(t)+Y(t)=\tau_{I} R^{\prime}(t)+R(t)\nonumber \]
Referencias
- Coughanowr, D.R. y S.E. LeBlanc (2009). Análisis Y Control De Sistemas De Procesos. Tercera Edición. Mc-Graw Hill.