
11.4: Control de Ratio
- Page ID
- 85450

Introducción
La arquitectura de control de relación se utiliza para mantener la relación entre dos variables para controlar una tercera variable. Quizás una descripción más directa en el contexto de esta clase es la siguiente: La arquitectura de control de relación se utiliza para mantener el caudal de una corriente (alimentación controlada dependiente) en un proceso en una proporción definida o especificada relativa a la de otra (corriente de alimentación silvestre independiente) (3 ) con el fin de controlar la composición de una mezcla resultante.
Como se insinuó en la definición anterior, las arquitecturas de control de relación se usan más comúnmente para combinar dos corrientes de alimentación para producir un flujo mixto de una composición o propiedad física deseada aguas abajo (3). Los controladores de relación también pueden controlar más de dos flujos. Teóricamente, un número infinito de corrientes puede ser controlado por el controlador de relación, siempre que haya una corriente de alimentación controlada. De esta manera, la arquitectura de control de relación es alimentada en la naturaleza. En este contexto, la arquitectura de control de relación implica el uso de una corriente de alimentación silvestre independiente y una corriente dependiente llamada alimentación controlada.
El control de relación es la forma más elemental de control de avance. Estos sistemas de control se aplican casi exclusivamente a los controles de caudal. Hay muchos usos comunes de los controles de relación en el contexto de la ingeniería química. Se utilizan frecuentemente para controlar los flujos en reactores químicos. En estos casos, mantienen la proporción de reactivos que entran en un recipiente de reacción en proporciones correctas para mantener las condiciones de reacción ideales. También se utilizan frecuentemente para diluciones a gran escala.
Control de relación basado en el error de una relación variable
El primer tipo de arquitectura de control de relación utiliza el error de una relación variable (\(R_{actual}\)) de una relación establecida (\(R_{set}\)) para manipular y (el flujo controlado). \(R_{actual}\)es una relación de las dos variables corriente salvaje y corriente controlada. El controlador ajusta el caudal de la corriente\(y\) (corriente controlada) de una manera apropiada para el error (\(R_{actual} - R_{set}\)).
El error en este sistema se representaría usando las siguientes ecuaciones:
\[\frac{y}{y_{w}}=R_{\text {actual }} \nonumber \]
o
\[\frac{y_{w}}{y}=R_{\text {actual }} \nonumber \]
con
\[\text{Error} =R_{\text {actual }}-R_{\text {set }} \nonumber \]
Este error se ingresaría a su ecuación general para su controlador P, PI o PID como se muestra a continuación.
\[V_{y}=Offset +K_{c}(Error)+\frac{1}{\tau_{I}} \int(\text {Error}) d t+\tau_{D} \frac{d(\text {Error})}{d t} \nonumber \]
NOTA: Vy se usa en lugar de y, porque y no es ajustable directamente. La única manera de ajustar y es ajustar la válvula (V) que afecta a y.
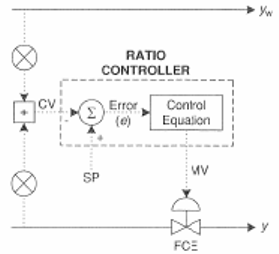
4.2.1 Diagrama del Sistema de Relación Dependientes. Imagen tomada de Svreck et al.
Control de relación basado en el error de la corriente controlada
El segundo tipo de arquitectura de control de relación utiliza el error de un punto de ajuste (yset, setpoint de la variable de control) de y (variable controlada) para controlar, una vez más, y El controlador ajusta el caudal de la corriente y de una manera apropiada para el error (y-yset).
El error en este sistema se representaría usando la siguiente ecuación:
\[\boldsymbol{y}_{w} \boldsymbol{R}_{s e t}=\boldsymbol{y}_{s e t} \nonumber \]
o
\[\frac{\boldsymbol{y}_{w}}{\boldsymbol{R}_{\text {set}}}=\boldsymbol{y}_{\text {set}} \nonumber \]
con
\[\text{Error} =y-y_{\text {set }} \nonumber \]
Este error se ingresaría a su ecuación general para su controlador P, PI o PID como se muestra a continuación.
\[V_{y}= \text{Offset} + K_{c}(Error)+\frac{1}{\tau_{I}} \int(Error) d t+\tau_{D} \frac{d(Error)}{d t} \nonumber \]
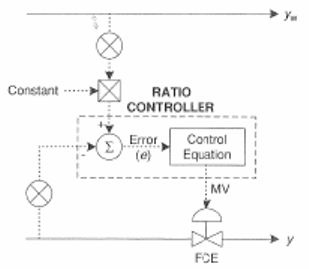
4.3.1 Diagrama del Sistema Dependente de Caudal. Imagen tomada de Svreck et al.
Comparación de los dos tipos de control de relación
La principal diferencia entre los dos tipos mencionados de arquitectura de control de relación es que responden a los cambios en la variable monitoreada (Ractual o y - las variables a través de las cuales se determina el error) de manera diferente.
El primer método mencionado que define el error como (R_ {real} -R_ {set}\) (variable monitoreada de\(R_{actual}\)) responde lentamente cuando y es relativamente grande y demasiado rápido cuando y es relativamente pequeño. Esto se explica mejor examinando las ecuaciones a continuación.
\ [\ begin {align}
R&=\ frac {y_ {w}} {y}\ largoderrow\ frac {\ parcial (R)} {\ parcial\ izquierda (y_ {w}\ derecha)} =\ frac {1} {y}\\
R&=\ frac {y} {y_ {w}}\ largederrow\ frac {\ parcial (R)} {\ parcial\ izquierda (y_ {w}\ derecha)} =-\ frac {y} {y_ {w} ^ {2}}
\ end {align}\ nonumber\]
A diferencia del primer método, el segundo método mencionado que define el error como\(y-y_{set}\) (variable monitoreada de y) no responde de manera diferente dependiendo de las cantidades relativas de y (o cualquier otra cosa, para el caso). Esto se explica mejor examinando las ecuaciones a continuación.
\ [\ begin {align}
y&=y_ {w} R_ {y t}\ largoderightarrow\ frac {\ parcial (y)} {\ parcial\ izquierda (y_ {w}\ derecha)} =R_ {y t}\
y&=\ frac {y_ {w}} {R_ {s e t}}\ largoderrow\ frac\ parcial (y)} {\ parcial\ izquierda (y_ {w}\ derecha)} =\ frac {1} {R_ {y e t}}
\ end {align}\ nonumber\]
Dificultades con los controladores de relación
Problemas de estado estacionario
Una dificultad común que se encuentra con los controladores de relación ocurre cuando el sistema no está en estado estacionario. Las condiciones de estado estacionario pueden provocar un retraso en el ajuste del caudal manipulado y, por lo tanto, no se puede cumplir el estado deseado del sistema.
Estaciones de mezcla
Para superar la dificultad con el estado estacionario, se puede utilizar una estación Blend, que toma en cuenta tanto la relación establecida como el arroyo salvaje. Como puede verse en el diagrama a continuación, la estación Blend toma como entradas el caudal de la corriente silvestre, la relación establecida y el punto de ajuste inicial para el arroyo salvaje (r1). Usando un factor de ponderación, llamado ganancia, la estación Mezcla determina un nuevo punto de ajuste para el flujo manipulado (r2). La relación que determina este nuevo punto de ajuste se puede ver a continuación.
\[r_{2}=\operatorname{set} r a t i o\left[\gamma^{*} r_{1}+(1-\gamma) y_{w}\right] \nonumber \]
donde\(γ\) está el factor de ganancia.
Imagen tomada del artículo de Astrom y Hagglund sobre “Advanced PID Control”.
Problemas de precisión
Otro problema (que es un problema con todos los controladores “feed-forward”) es que la variable bajo control (relación de mezcla) no se mide directamente. Esto requiere una caracterización altamente precisa de las válvulas de la corriente controlada para que el caudal deseado sea realmente igualado.
Una forma de abordar este problema es utilizar dos niveles de control PID (Cascade Control). El primer nivel monitorea el caudal de las corrientes controladas y lo ajusta al punto de ajuste deseado con una válvula. El nivel externo de control monitorea el caudal de la corriente silvestre que ajusta el punto de ajuste de la corriente controlada multiplicando por la relación deseada. Por ejemplo, si el caudal de la corriente A se mide como 7 gpm, y la relación deseada de A: B es 2, entonces el nivel externo de control ajustará el punto de ajuste de B a 3.5. Entonces el nivel interno de control monitoreará el caudal de B hasta que logre un caudal de 3.5.
Esquemas de Control de Ratio
Las siguientes subsecciones introducen tres esquemas de controlador de relación. Cada esquema ilustra diferentes formas en que la corriente de alimentación controlada puede manipularse para dar cuenta de la corriente de alimentación silvestre variable.
Controlador de relés de relación
El caudal de alimentación silvestre es recibido por el relé de relación y luego multiplicado por la relación de mezcla deseada. El relé de relación emite el caudal de alimentación controlado calculado que se compara con el caudal real de la corriente de alimentación controlada. Luego, el controlador de flujo ajusta el caudal de alimentación controlado para que coincida con el punto de ajuste (3).
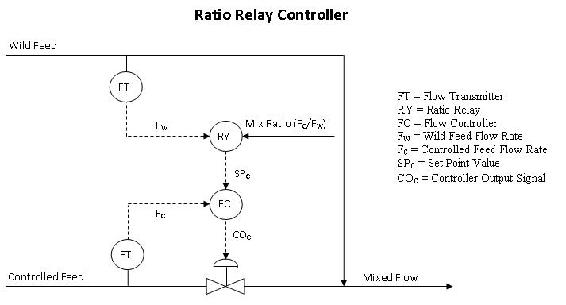
Imagen adaptada de Houtz, Allen y Cooper, Doug “The Ratio Control Architecture”
La relación de mezcla (Fc/Fw) no es de fácil acceso, por lo que requiere un alto nivel de autorización para cambiar. Este mayor nivel de seguridad puede ser una ventaja para que solo las personas permitidas puedan cambiar la proporción de mezcla y disminuir la posibilidad de que ocurra un error accidental. Una desventaja es que si es necesario cambiar rápidamente la relación de mezcla, la operación puede apagarse mientras se espera a que la persona adecuada la cambie.
Otra desventaja es que se requieren señales de flujo lineal. Las señales de salida de los transmisores de flujo, Fw y Fc, deben cambiar linealmente con un cambio en el caudal. Los medidores de flujo de turbina proporcionan señales que cambian linealmente con los caudales. Sin embargo, algunos medidores de flujo como los medidores de orificio requieren cálculos adicionales para lograr una relación lineal entre el caudal y la señal.
Controlador de Fracción de Flujo
Los controladores de relés de fracción de flujo y relación son muy similares, excepto que el controlador de fracción de flujo tiene la ventaja de ser un controlador de entrada única y salida única. Un controlador de fracción de flujo recibe el alimento silvestre y los caudales de alimentación controlados directamente. La relación deseada entre el alimento controlado y el alimento silvestre es una opción preconfigurada en los modernos sistemas de control por computadora (3).
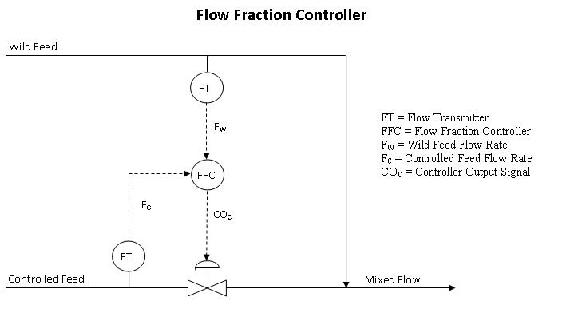
Imagen adaptada de Houtz, Allen y Cooper, Doug “The Ratio Control Architecture”
Relé de relación con entrada remota
El relé de relación con el modelo de entrada remota de un controlador de relación es similar al modelo de control en cascada en que es parte de una estrategia de control más grande. El propósito de este modelo es dar cuenta de cualquier cambio inesperado o no medido que se haya producido en las corrientes de alimentación salvaje y controlador. El siguiente diagrama ilustra cómo se utiliza la composición del flujo mixto para cambiar la relación de relé (3).
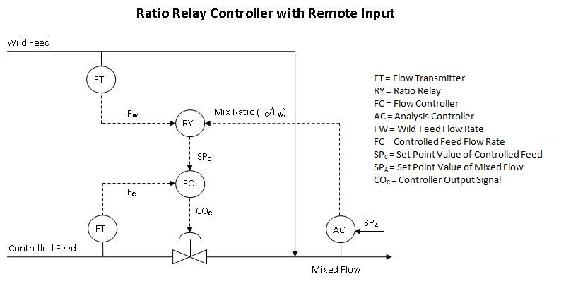
Imagen adaptada de Houtz, Allen y Cooper, Doug “The Ratio Control Architecture”
La principal ventaja de tener entrada remota es que la relación de mezcla se actualiza constantemente. Una desventaja de usar un analizador adicional es que el análisis de la corriente mixta puede llevar mucho tiempo y disminuir el rendimiento del control. El tiempo de retraso depende del tipo de sensor que se utilice. Por ejemplo, lo más probable es que un sensor de pH devuelva una retroalimentación rápida y confiable, mientras que un espectrómetro requeriría más tiempo para analizar la muestra.
Ventajas y Desventajas
Hay algunos pros y contras de usar el control de relación donde hay una relación que se mantiene entre dos caudales.
Ventajas
- Permite al usuario vincular dos flujos para producir y mantener una relación definida entre las transmisiones
- Sencillo de usar
- No requiere un modelo complejo
Desventajas
- A menudo uno de los caudales no se mide directamente y el controlador asume que los flujos tienen la relación correcta a través del control de solo el caudal medido
- Requiere una relación de relación entre variables que necesita ser mantenida
- No es tan útil para variables distintas de los caudales
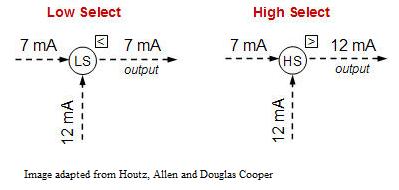
Seleccionar elementos en el control de relación
Un elemento selecto permite una mayor sofisticación de control al agregar lógica de toma de decisiones al sistema de control de relación. Al hacerlo, una variable de selección se puede controlar a una restricción máxima o mínima. La siguiente figura muestra la acción básica tanto de un controlador de selección baja como de selección alta.
Control de anulación de selección única
Muchas veces, estos elementos selectos se utilizan como un elemento de anulación en el control de relación. Tomemos, por ejemplo, el sistema de control de relación (con entrada remota) de un proceso de combustión de aire medido en la siguiente figura.
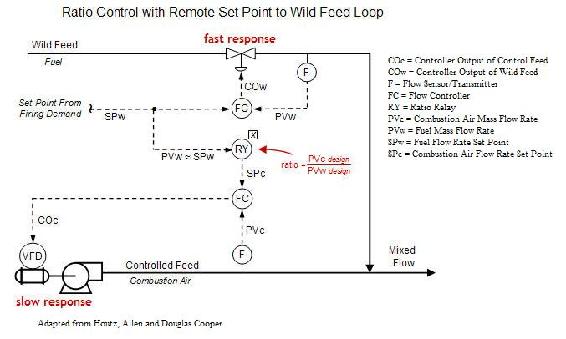
En este diseño, el punto de ajuste de combustible, SPw, entra como demanda de combustión de una parte diferente de la planta, por lo que el caudal de combustible no se puede ajustar libremente. A medida que el punto de ajuste del combustible (y por lo tanto el caudal másico del combustible, PvW) fluctúa, se emplea un relé de relación para calcular el punto de ajuste del aire de combustión, S Si las salidas de comando de flujo (CoW y CoC) son capaces de responder rápidamente, entonces la arquitectura del sistema debe mantener la relación aire/combustible deseada a pesar de que el punto de ajuste de la demanda varía rápidamente y con frecuencia. Sin embargo, a veces el elemento de control final (como la válvula en la corriente de alimentación de combustible y el soplador en la corriente de alimentación de aire de combustión en el diagrama) puede tener un tiempo de respuesta lento. Idealmente, los caudales fluctuarían al unísono para mantener una relación deseada, pero la presencia de un elemento de control final lento puede no permitir que las corrientes de alimentación coincidan en esa relación deseada durante un periodo de tiempo significativo. Las válvulas a menudo tienen tiempos de respuesta rápidos, sin embargo, sopladores como el que controla la corriente de alimentación de aire de combustión pueden tener tiempos de respuesta lentos. Una solución a este problema es agregar una anulación de “selección baja” al sistema de control, como se muestra en la siguiente figura.
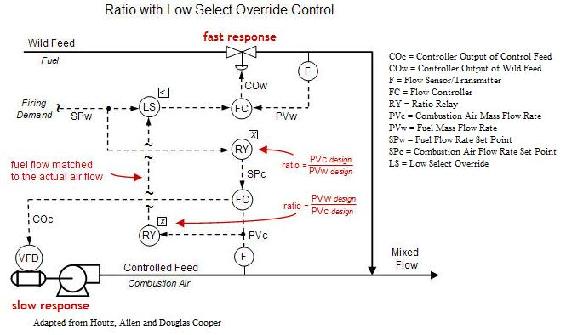
El segundo controlador de relación recibirá el caudal másico de aire de combustión medido real y calculará un caudal de combustible coincidente basado en la mezcla de aire/combustible de diseño ideal. Este valor se transmite luego al controlador de selección baja, que también recibe el punto de ajuste de caudal de combustible basado en la demanda de disparo. El controlador de selección baja tiene entonces la potencia para pasar la menor de las dos señales de entrada hacia adelante. Entonces, si la demanda de combustión del caudal de combustible excede la disponibilidad de aire de combustión requerida para quemar el combustible, entonces el controlador de selección baja puede anular la demanda de disparo y pasar a lo largo de la señal del caudal de combustible calculado en función del flujo de aire real (desde el segundo relé de relación).
Esta estrategia de anulación de selección baja asegura que la relación aire/combustible adecuada se mantendrá cuando la demanda de disparo aumente rápidamente, pero no tiene efecto cuando la demanda de disparo está disminuyendo rápidamente. Si bien la anulación de selección baja puede ayudar a eliminar la contaminación cuando las tasas de demanda de disparo aumentan rápidamente, una rápida disminución de la demanda de cocción puede causar combustión incompleta (así como aumento de la temperatura) y pérdida de ganancias.
Control de anulación de limitación cruzada
El control de anulación de limitación cruzada utiliza el beneficio de múltiples controles de selección. Más comúnmente, un sistema de control que utilice la estrategia de anulación de limitación cruzada implementará tanto un control de selección alta como un control de selección baja. Como resultado, el sistema puede dar cuenta del rápido aumento de la demanda de disparo, así como la disminución rápida de la demanda de disparo. La siguiente figura representa un escenario de este tipo usando el aire de combustión de entrada y el combustible para una caldera como ejemplo.
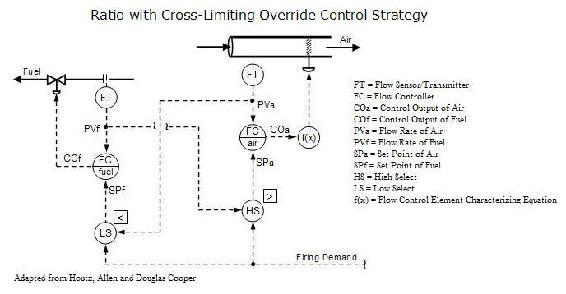
Se supone que la misma demanda de disparo ingresa al control de selección alta y selección baja y los transmisores de flujo se han calibrado de manera que se logra la relación aire/combustible ideal cuando ambas señales coinciden. Como resultado, el punto de ajuste del aire siempre será el mayor valor de la demanda de disparo y las señales de flujo de combustible actuales. De igual manera, el punto de ajuste del combustible siempre será el menor valor de la demanda de combustión y las señales de flujo de aire actuales. Entonces, a medida que aumente la demanda de fuego, el punto de consigna del aire aumentará. Al mismo tiempo, la selección baja mantendrá el punto de ajuste del combustible a la señal establecida por el flujo actual o aire. Por lo tanto, el punto de ajuste del combustible no coincidirá con la creciente demanda de combustión, sino que seguirá el aumento del caudal de aire a medida que responde hacia arriba. De manera similar, si la demanda de disparo disminuye, el control de selección baja escuchará la demanda de disparo y el controlador de selección alta no lo hará. Como resultado, la demanda de disparo hará que disminuya directamente el punto de ajuste del combustible, mientras que el punto de ajuste del aire seguirá la tasa decreciente de combustible a medida que responde a la baja. La estrategia de anulación de limitación cruzada permite un mayor equilibrio en un sistema de control de relación.
Funcionó Ejemplo 1
En el siguiente proceso que se muestra a continuación, una solución concentrada de producto se diluye continuamente para ser vendida como una solución final al 10%. Los caudales provenientes de la unidad que alimenta el producto puro a este tanque de mezcla no son constantes (la corriente silvestre), y por lo tanto se usa un controlador de relación para diluir adecuadamente la solución.
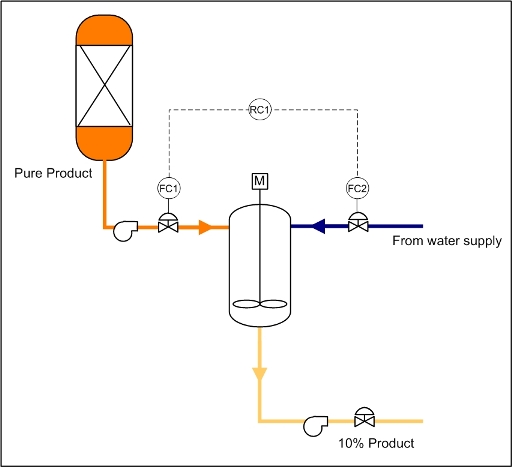
En este ejemplo, el controlador de relación se establecería en un valor de FC1/FC2 = RC1 = 9. El contoller de proporciones en este caso funcionaría entonces por la siguiente lógica:
Para un desafío adicional, determine una ecuación de error que pueda esté relacionada con este controlador.
Funcionó Ejemplo 2
Uno de los usos más comunes de un controlador de relación se utiliza para corregir la relación aire-combustible en automóviles. Una cantidad especificada de aire siempre es absorbida por el motor y la cantidad de combustible inyectado es controlada por una computadora mediante el uso de un controlador de relación. La relación estequiométrica de aire a gasolina en masa es de 14. 7:1. Hay un sensor de oxígeno en el colector de escape, así como sensores para todos los componentes de escape. Este sensor está conectado a la válvula para la inyección de combustible. Si hay demasiado oxígeno medido en los gases de escape, entonces se dice que la mezcla es pobre. ¿La relación de aire a gas en la mezcla original es mayor o menor que 14. 7:1 y qué debe hacer la válvula que controla la inyección de combustible?
Nota: Esta es una forma indirecta de un controlador de relación ya que mide una propiedad física de aguas abajo para determinar si la relación es demasiado alta o baja. Puede encontrar más información aquí sobre la relación aire-combustible y sensores de oxígeno.
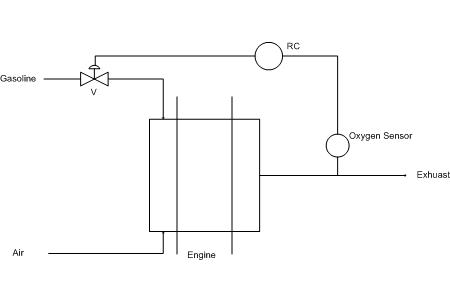
Respuesta: Como hay oxígeno sobrante en el escape, debe haber habido demasiado en la mezcla original. La relación de aire a gas en la mezcla original es mayor a 14. 7:1 y así la computadora debería abrir más la válvula para la inyección de combustible.
Funcionó Ejemplo 3
Muchos procesos en la industria requieren múltiples flujos de proceso que ingresan en diferentes ubicaciones del sistema. Un ingeniero senior te da el proyecto para diseñar el esquema de control para un nuevo proceso a implementar en la empresa. El proceso implica 2 reacciones y 3 corrientes de alimentación diferentes.
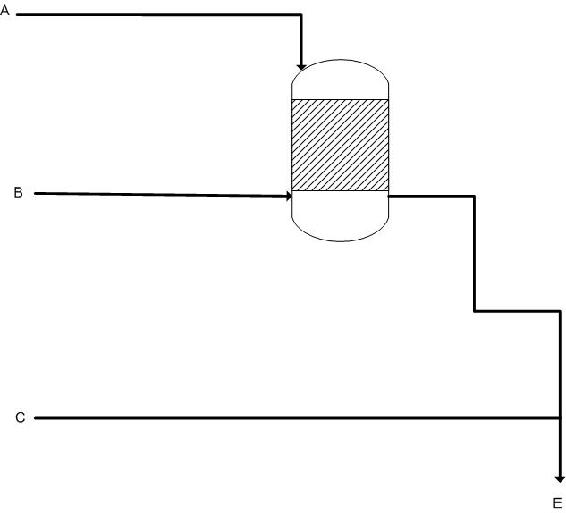
Reacciones: 2A + B —> D
\[\ce{C + 3D -> E} \nonumber \]
Supongamos que las reacciones van al 100% de finalización (solo se necesitan cantidades estequiométricas).
Complete el P&ID con el esquema de control y escriba las relaciones (con respecto a B) en las que se establecerán los otros caudales molares. Explique también cómo tomará acción el sistema cuando detecte exceso de C o D en el flujo de productos.
Solución:
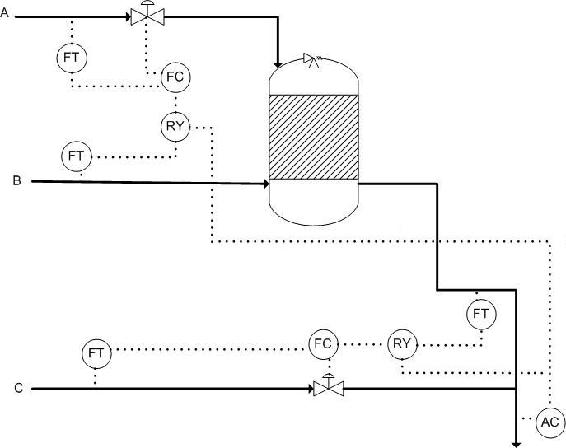
A: 2 B: 1 C: 1 D: 1/3 E: 1/3
Si la CA detecta cantidades mayores o menores de C esperadas, ajustará el ajuste de la relación en RY conectado al controlador de flujo de C, reduciendo o disminuyendo la relación de C a B, respectivamente.
¿Por qué se usa una Blend Station?
- para crear el punto de ajuste para el controlador de relación
- para reducir el tiempo de retraso en el ajuste de los caudales
- para medir caudales
- multiplicar un caudal por la relación deseada
- Contestar
-
TBA
¿Cómo se usa la relación establecida en el primer tipo de controlador de relación descrito anteriormente?
- Da salida a cuánto debe estar fluyendo cada flujo.
- Se compara con dos caudales para ajustar uno si es necesario.
- Indica al sistema que se apegue.
- Se ajusta para el tiempo de retraso cuando el sistema no está en estado estacionario.
- Contestar
-
Agrega textos aquí. No elimine primero este texto.
Referencias
- Astrom, Karl J. y Hagglund, Torr. “Control PID Avanzado” La Sociedad de Instrumentación, Sistemas y Automatización.
- Mahoney, Donald P., Svrcek, William Y. y Young, Brent R. “Un enfoque en tiempo real para el control de procesos”, Segunda Edición. John Wiley & Sons, Ltd.
- Houtz, Allen y Cooper, Doug “La arquitectura de control de relaciones” http://www.controlguru.com (http://www.controlguru.com/2007/120207.html)