
14.4: Resumen- Resumen sobre las filosofías, ventajas y desventajas de las Arquitecturas de Control.
- Page ID
- 85539

Resumen de Arquitecturas de Control
A continuación se muestra un resumen de las filosofías, ventajas e inconvenientes de las diferentes arquitecturas de control en la Tabla 1.
| Filosofía | Ventajas | Desventajas | |
|---|---|---|---|
| Comentarios | Control ajusta los errores a medida que ocurren |
|
|
| Feed Forward | Control conecta errores que ocurren |
|
|
| Ratio | Los controles conectan dos flujos para mantener una relación constante |
|
|
| Cascade | Controla los puntos de ajuste de los sensores mediante el control de otros sensores para integrar múltiples información |
|
|
| Mixto | Control integrando combinaciones de arquitecturas de control |
|
|
Introducción
El nivel de líquido y el control de la presión del líquido son aspectos fundamentales de muchos procesos de control debido a la dependencia de la estabilidad y conveniencia del uso del líquido. El siguiente artículo presentará los principales conceptos detrás del control de presión de líquido, control de nivel de líquido, examinando las características del bucle, respuesta, afinación y limitaciones. Se incluyen dos modelos para ilustrar la aplicación de un circuito de control de presión de líquido y un bucle de control de nivel en sistemas idealizados.
Conceptos básicos sobre el control
Al igual que sus contrapartes de temperatura, nivel y flujo, la presión es una de las variables de proceso más comunes. La presión es una variable clave del proceso ya que proporciona una condición crítica para procesos como cualquier reacción química, extrusión, ebullición, destilación, aire acondicionado y aspirado. Un control deficiente de la presión puede conducir probablemente a problemas asociados con la calidad, la seguridad y la productividad. Por ejemplo, la presencia de condiciones de alta presión en un recipiente sellado puede resultar en una explosión y por lo tanto es imperativo que la presión se mantenga bajo un buen control dentro de sus límites de seguridad.
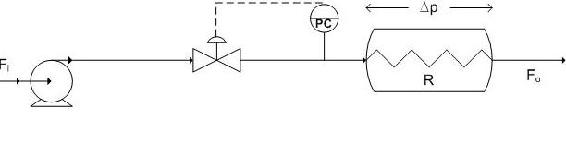
El control de presión de líquido es uno de los bucles de control más fáciles en el sentido de que comparte muchas de las mismas características de un bucle de flujo común. El objetivo del circuito de presión de líquido es controlar la presión a la presión de punto de ajuste necesaria mediante el control del flujo con las necesidades cambiantes del proceso. Debido a que se trata de un líquido, el flujo presente es el de un fluido incompresible y como resultado la presión cambia muy rápidamente conduciendo a un proceso de respuesta rápida con pequeños tiempos muertos y capacitancia. Este proceso se comporta como una restricción fija donde el cambio de presión es una función del flujo a través del proceso. A continuación se ilustra un diagrama con control de presión de líquido en la tubería que conduce al proceso.
Existen algunas consideraciones adicionales para el circuito de presión de líquido antes mencionado. En primer lugar, el controlador puede ser proporcional más integral (PI) o solo integral (solo I) si K c < 2 de lo contrario se va a usar un controlador solo proporcional (solo P). Este controlador está sintonizado de manera similar al controlador de flujo. Otra consideración es que la ganancia del proceso no es constante, se debe usar un extractor de raíz cuadrada o la ganancia de bucle más alta para sintonizar el controlador. Esta ganancia de bucle más alta se emplea para evitar que el bucle de proceso se vuelva inestable. Finalmente, este bucle de presión de líquido es ruidoso como su contraparte de bucle de flujo y como resultado se recomienda que no se use acción derivada en el controlador.
Si desea ver los diversos problemas asociados con los controladores de presión, consulte los artículos anteriores de la wiki.
Fundamentos de Control de Nivel
Controlar el nivel de líquido en un tanque es uno de los requisitos más básicos para que un proceso químico funcione de manera efectiva. La mayoría de los procesos de ingeniería química requieren que se mantenga algún tipo de líquido para su uso, y la forma más conveniente de garantizar que la cantidad adecuada de líquido esté disponible es a través del control de nivel. Un ejemplo específico de un proceso que requiere control de nivel se ve en todo el mundo. Las torres de agua deben tener una cantidad designada de agua dentro de ellas para garantizar una presión de agua suficiente a los vecindarios circundantes y por lo tanto se usa el control de nivel de líquido (LLC)
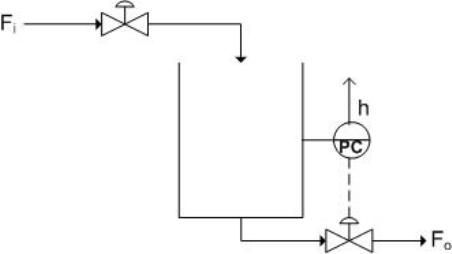
Afortunadamente, el control de nivel de líquido es uno de los bucles de control más fáciles disponibles. Los sistemas son bastante simples, un sensor lee el nivel de líquido dentro de un tanque, que luego se transporta al controlador. Posteriormente, el controlador cambia una válvula para aumentar o disminuir el caudal dentro o fuera del tanque, dependiendo de la acción requerida y la colocación controlada de la válvula. A continuación se muestra una figura con LLC en la tubería saliendo del tanque.
La facilidad de LLC también radica en su gran capacitancia y tiempo muerto nominal. Por lo general, los tiempos de retención varían de 5 a 15 minutos. Pueden surgir problemas cuando el ruido de la señal se convierte en un factor, como suele ocurrir con los controladores de nivel. Consulte artículos wiki anteriores a los problemas asociados con los controladores de nivel (), sin embargo es importante tener en cuenta que una medición de peso en lugar de medir directamente el nivel puede ser una forma efectiva de eliminar el ruido.
Controladores solo P
A menudo, usar un controlador solo P es la mejor manera de garantizar un control de nivel adecuado, en la mayoría de los casos solo resultará un pequeño porcentaje de error y reduce los problemas asociados con el ruido. Los controladores solo P deben usarse cuando la ganancia es muy pequeña y el tanque tiene una gran capacidad. Esta será la base para el resto del texto.
Un controlador solo P funciona con el siguiente principio de control:
\[\text{Output} =\text{Gain} \times \text{Error} + \text{Bias} \nonumber \]
La salida efectúa directamente una válvula para controlar el caudal dentro o fuera del tanque. Consulte los artículos anteriores de la wiki para obtener más información sobre el control P-only.
Nivel de ruido de medición
Al controlar los niveles de líquido en bidones o recipientes, un aspecto importante a considerar es que puede haber ruido en la medición del nivel debido a perturbaciones tales como turbulencia superficial, ebullición del líquido o agitación. Debido a la existencia de este ruido, el uso de un controlador de acción derivada puede no ser apropiado. Sin embargo, si se utiliza este tipo de acción del controlador, existen diversos métodos que pueden emplearse para minimizar el ruido.
Método 1: Usar un desplazador en un pozo de calado
- Ventaja: Filtra el ruido de alta frecuencia debido a la turbulencia en el tanque
- Desventaja: Nivel de balanceo debido al movimiento de baja frecuencia del líquido del tanque en el pozo resultante de la formación de un tubo en U entre el tanque y el pozo
Método 2: Usar una medición ultrasónica de nivel con filtrado electrónico de la señal
- Ventaja: Funciona bien cuando el período de respuesta de nivel es mucho menor que la frecuencia de ruido
Método 3: Usar un método de pesaje en tanques
En este método, se coloca un dispositivo de carga debajo de los soportes del tanque para medir la masa del tanque. Los valores de peso de salida son promediados por un transmisor que luego se envía a un convertidor que emite el nivel correspondiente al controlador.
- Ventaja: Elimina eficazmente el ruido en la medición del nivel debido a la turbulencia
Modelos
Los siguientes son modelos Excel de Control de Presión y Nivel en sistemas simples. El control solo proporcional se utiliza principalmente para estos modelos. El ruido del controlador se ha eliminado en aras de la simplicidad.
Modelo de control de presión de líquido
El modelo en cuestión ilustra tanto el sistema de alimentación hacia atrás de la presión del líquido en una línea de tuberías de un proceso como sus relaciones de ganancia de proceso. Este circuito de control de presión de líquido está regulado por la posición de la válvula en la tubería que conduce al proceso. Aquí se usa un control de solo P para cambiar la posición de la válvula, lo que resulta en la respuesta necesaria para alcanzar el valor de punto de ajuste. Los siguientes son los supuestos realizados y las ecuaciones utilizadas en el modelado de este proceso. Se supone que el proceso se comporta como una restricción fija como una placa de orificio cuyo Dp es función del flujo a través del proceso. Otra suposición que se debe hacer es que la válvula responde linealmente al caudal a través de ella. Al determinar la ganancia del proceso se utilizaron las siguientes ecuaciones.
\[P=\Delta p+P_{0} \nonumber \]
donde\(P_0\) está la presión aguas abajo a flujo cero
\[\Delta p=\frac{F^{2}}{R^{2}} \nonumber \]
donde\(R\) esta la resistencia al flujo del proceso. Como resultado obtenemos:
\[P=\frac{F^{2}}{R^{2}}+P_{0} \nonumber \]
La ganancia del proceso se determina entonces por la siguiente expresión:
\[K_{p}=\frac{d P}{d F}=\frac{2 F}{R^{2}} \nonumber \]
Un modelo para el sistema de alimentación hacia atrás para el control de presión de líquido introducido en este artículo es muy complicado y posiblemente podría estar fuera del alcance de nuestra discusión. Un posible modelo alternativo sería muy similar al modelo de nivel de líquido que se presenta a continuación con la cabeza en el tanque determinando la presión del líquido en la tubería que sale del reactor.
Modelo de control de nivel de líquido
El siguiente modelo representa un sistema de alimentación hacia atrás de un tanque de retención de líquido. El bucle de control está regulado por la posición de la válvula de salida en la tubería que sale del tanque. Se supone un caudal máximo de salida y la altura del agua en el tanque no tiene ningún efecto sobre el caudal de salida del tanque. Esta suposición se puede hacer en tanques que son suficientemente más anchos que la tubería que sale operando con poco cambio de nivel de líquido, como suele ser el caso. Otra suposición hecha es la respuesta lineal de la válvula al caudal de salida.
La tubería que ingresa al tanque es ajustada por el usuario a un caudal fijo. El control P-only se utiliza para cambiar la posición de salida de la válvula con el fin de provocar la respuesta deseada para obtener el valor de consigna. El control P sigue la ecuación indicada anteriormente y el sesgo se designa por el punto en el que la válvula está abierta para permitir que ocurra un estado estacionario. La ganancia en los sistemas de control de nivel suele ser baja, sin embargo esto también puede ser cambiado por el usuario. El punto de ajuste para el tanque es determinado por el usuario, al igual que los caudales de entrada de líquido y el caudal máximo de salida.
El usuario puede introducir un cambio de punto de ajuste para ver la respuesta correspondiente en el controlador.
Usando el modelo Excel de control de nivel líquido, ¿qué encuentras cuando cambias el punto de ajuste de nivel en un punto determinado en el tiempo?
¿Qué pasa si cambias la ganancia a un número grande?
Solución
Cuando cambias el punto de ajuste de nivel, debes notar un aumento o disminución correspondiente en el nivel a medida que el control P entra en acción y se seres para compensar el error. La velocidad a la que se obtiene este punto de ajuste está determinada por la ganancia del controlador. A altas ganancias de controlador el sistema responde extremadamente rápido de una manera irreal, es por esto que la ganancia del controlador suele ser pequeña en tanques de gran capacidad con control de flujo.
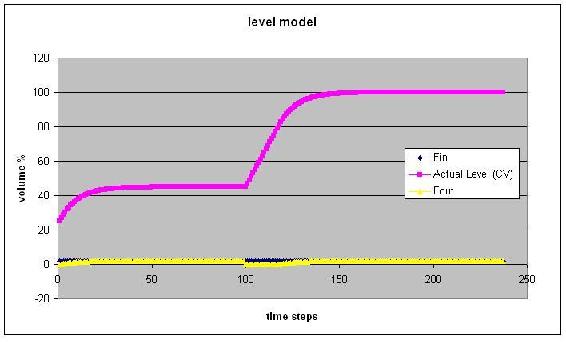
La figura anterior cambia el punto de consigna a 100 @ t=100
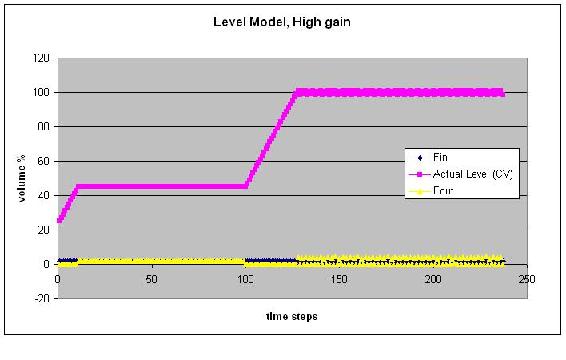
La cifra anterior utiliza una ganancia de controlador muy alta. Tenga en cuenta la respuesta irreal.
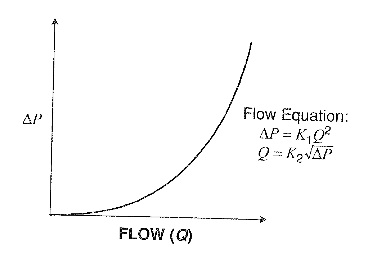
¿Cuál es la principal diferencia entre el modelo para la ganancia de proceso del bucle de flujo de presión introducido anteriormente en el artículo y una curva de respuesta de flujo de cabeza típica?
Solución
La respuesta de la presión al flujo se forma de manera similar a la respuesta del dispositivo de flujo de cabeza y como resultado las reglas que rigen el modelo de ganancia del proceso de presión de líquido son en esencia las mismas para la respuesta del dispositivo de flujo de cabeza. La única diferencia entre las dos curvas de respuesta es que mientras que la presión varía de Po a 100 por ciento para la curva de ganancia del proceso para el bucle de flujo de presión, la presión varía de 0 a 100 por ciento para el dispositivo de flujo de cabeza.
A continuación se muestra la respuesta para el bucle de presión seguido de la del dispositivo de flujo de cabeza.

Pregunta de opción múltiple 1
¿Cuándo se deben usar los controladores P-only en el control de nivel de líquido?
- Siempre, porque es muy fácil.
- Nunca porque es demasiado simple.
- En ocasiones, cuando la ganancia es pequeña y la capacidad del tanque es grande.
- Ninguna de las anteriores
Pregunta de opción múltiple 2
Se pueden usar varios métodos para minimizar el ruido en una medición de nivel cuando se usa qué tipo de acción del controlador:
- Ninguno, nunca se puede minimizar el ruido en una medición de nivel
- Integral
- Derivada
- Control PI