
7.0: Preludio al diseño de sistemas de datos muestreados
- Page ID
- 85000
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Los sistemas de control de datos muestreados incluyen elementos accionados por reloj y reflejan las tendencias actuales en el diseño de sistemas de control de retroalimentación. En la tecnología contemporánea de sistemas de control, la tarjeta de adquisición de datos (DAQ) se usa comúnmente para detectar, muestrear y procesar variables de interés. El controlador se implementa digitalmente como una rutina de software en un controlador lógico programable (PLC), microcontrolador o procesador de señal digital (DSP).
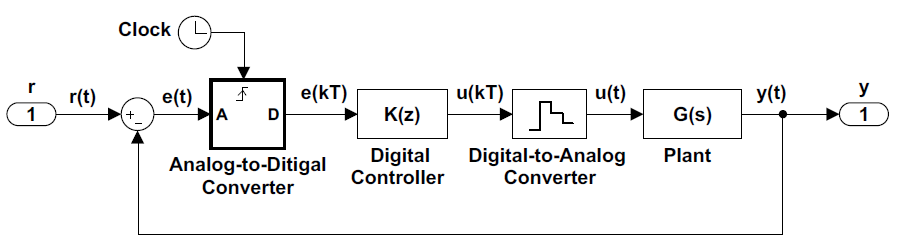
Los sistemas de control de datos muestreados emplean controladores basados en software que funcionan con tiempo discretizado. Los modelos del sistema de tiempo discreto están representados por ecuaciones de diferencia, con variables de entrada y salida representadas por secuencias numéricas. Los convertidores analógico-digital (ADC) y de digital a analógico (DAC) se modelan como dispositivos de muestreo y retención (Figura 7.0.1).
Un modelo de sistema de tiempo continuo se puede convertir a un modelo de sistema discreto asumiendo una entrada constante por partes generada por una retención de orden cero (ZOH). En MATLAB, la conversión continua a discreta es manejada por la función 'c2d' en Control Systems Toolbox. La función permite una variedad de métodos de entrada.
La transformada z para sistemas de tiempo discreto sirve como el equivalente de la transformada de Laplace para sistemas de tiempo continuo. Los modelos de sistemas discretos están representados por funciones de transferencia de pulsos que son válidas en instancias de muestreo. El ángulo de fase agregado debido al muestreo afecta negativamente la estabilidad dinámica del sistema de bucle cerrado. La estabilidad del sistema discreto está indicada por las raíces del polinomio característico que están restringidas al interior del círculo unitario.
Los controladores analógicos diseñados para modelos de función de transferencia de sistemas de tiempo continuo se pueden aproximar para su aplicación a sistemas de datos muestreados. Suponiendo una frecuencia de muestreo lo suficientemente alta (de cinco a diez veces el ancho de banda del sistema), el controlador digital obtenido por emulación brinda un rendimiento comparable al controlador analógico que imita.
La técnica de locus raíz se puede utilizar de manera similar para el diseño del controlador en el caso de sistemas discretos. El diseño se realiza en el plano z, manteniendo a la vista el límite de estabilidad, es decir, el círculo unitario. Los criterios de rendimiento definidos en términos de tiempo de asentamiento, relación de amortiguación, etc., pueden reflejarse en el plano z, como se hace convenientemente usando el comando 'grid' en MATLAB.
En este capítulo, discutiremos modelos de sistema de datos muestreados, sus propiedades, caracterización de estabilidad y el diseño de análisis y controlador para dichos sistemas.