
1.3: Conceptos Fundamentales y Principios del Análisis Estructural
- Page ID
- 84701

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Condiciones de Equilibrio
Las estructuras de ingeniería civil están diseñadas para estar en reposo cuando actúan sobre ellas por fuerzas externas. Una estructura en reposo debe satisfacer las condiciones de equilibrio, que requieren que la fuerza resultante y el momento resultante que actúa sobre una estructura sean iguales a cero. Las condiciones de equilibrio de una estructura se pueden expresar matemáticamente de la siguiente manera:\[\sum F=0, \text { and } \sum M=0\]
Compatibilidad de Desplazamiento
La compatibilidad del concepto de desplazamiento implica que cuando una estructura se deforma, los miembros de la estructura que están conectados en un punto permanecen conectados en ese punto sin vacío ni agujero. En otras palabras, se dice que dos partes de una estructura son compatibles en desplazamientos si las partes permanecen ajustadas juntas cuando la estructura se deforma debido a la carga aplicada. La compatibilidad del desplazamiento es un concepto poderoso utilizado en el análisis de estructuras indeterminadas con fuerzas redundantes desconocidas que exceden las tres ecuaciones de equilibrio. Para una ilustración del concepto, considere la viga en voladizo apuntalada que se muestra en la Figura 1.5a. Hay cuatro reacciones desconocidas en el haz: el momento reactivo, una reacción vertical y horizontal en el extremo fijo, y otra reacción vertical en el puntal en el punto B. Para determinar las reacciones desconocidas en el haz, se debe agregar una ecuación más a las tres ecuaciones de equilibrio. La ecuación adicional se puede obtener de la siguiente manera, considerando la compatibilidad de la estructura:\[\Delta_{B P}+\Delta_{B R}=0\]
En esta ecuación,\(\Delta_{B P}\) se encuentra el desplazamiento en punto\(B\) de la estructura debido a la carga aplicada\(P\) (Figura 1.5b), y\(\Delta_{B R}\) es el desplazamiento en el punto\(B\) debido a la reacción en el puntal\(R\) (Figura 1.5c). Los estudiantes siempre deben recordar que el primer subíndice del desplazamiento indica la ubicación donde ocurre el desplazamiento, mientras que el segundo subíndice indica la carga que causa el desplazamiento.

\(Fig. 1.5\). Viga en voladizo apoyada.
Principio de superposición
El principio de superposición es otro principio muy importante utilizado en el análisis estructural. El principio establece que los efectos de carga causados por dos o más cargas en una estructura linealmente elástica son iguales a la suma de los efectos de carga causados por la carga individual. Para una ilustración, considere la viga en voladizo que lleva dos cargas concentradas\(P_{1}\), y\(P_{2}\), en la Figura 1.6a. Las figuras 1.6b y 1.6c son las respuestas de la estructura en términos del desplazamiento en el extremo libre de la viga cuando las cargas individuales actúan sobre ellas. Por el principio de superposición, el desplazamiento en el extremo libre de la viga es la suma algebraica de los desplazamientos causados por las cargas individuales. Esta lata se escribe de la siguiente manera:\[\Delta_{B}=\Delta_{B P_{1}}+\Delta_{B P_{2}}\]
En esta ecuación,\(\Delta_{B}\) se encuentra el desplazamiento a\(B\);\(\Delta_{B P_{1}}\) y\(\Delta_{B P_{2}}\) son los desplazamientos a\(B\) causados por las cargas\(P_{1}\) y\(P_{2}\), respectivamente.

\(Fig. 1.6\). Aplicación del principio de superposición.
Principio de trabajo-energía
El principio trabajo-energía es una herramienta muy poderosa en el análisis estructural. El trabajo se define como el producto de la fuerza y la distancia recorrida por la fuerza, mientras que la energía se define como la capacidad de hacer trabajo. El trabajo se puede transformar en varias energías, incluyendo energía cinética, energía potencial y energía de tensión. En el caso de un sistema estructural, basado en la ley de conservación de energía, el trabajo realizado\(W\) es igual a la energía de deformación\(U\) almacenada al deformar el sistema. Esto se expresa matemáticamente de la siguiente manera:\[W=U\]
Considerar un caso donde una fuerza\(F\) se aplica gradualmente a un sistema estructural deformable. Al trazar la fuerza aplicada contra la deformación\(\Delta\) de la estructura, se crea la gráfica carga-deformación que se muestra en la Figura 1.7a. En el caso de la estructura linealmente elástica, el diagrama de carga-deformación será como se muestra en la Figura 1.7b. El trabajo incremental realizado\(d W\) por la fuerza al deformar la estructura sobre un desplazamiento incremental\(d \Delta\) se expresa de la siguiente manera:\[d W=F d \Delta\]
El trabajo total realizado se representa de la siguiente manera:\[W=\int_{0}^{\Delta} d W=\int_{0}^{\Delta} F d \Delta\]
Así, la energía de deformación se escribe de la siguiente manera:\[U=\int_{0}^{\Delta} F d \Delta\]
La energía de deformación en el caso de deformación linealmente elástica se puede obtener calculando el área bajo el diagrama carga-deformación en la Figura 1.7b. Esto se expresa de la siguiente manera:\[U=\frac{1}{2} F \Delta\]

\(Fig. 1.7\). Diagrama de carga-deformación.
Principio de Trabajo Virtual
El principio de trabajo virtual es otra herramienta analítica poderosa y útil en el análisis estructural. Fue desarrollado en 1717 por Johann Bernoulli. El trabajo virtual se define como el trabajo realizado por una fuerza virtual o imaginaria que actúa sobre un cuerpo deformable a través de una distancia real, o el trabajo realizado por una fuerza real que actúa sobre un cuerpo rígido a través de un desplazamiento virtual o ficticio. Para formular este principio en el caso de desplazamientos virtuales a través de un cuerpo rígido, considere una viga en voladizo apuntalada sometida a una carga concentrada\(P\) a una\(x\) distancia del extremo fijo, como se muestra en la Figura 1.8a. Supongamos que la viga experimenta un desplazamiento virtual elemental\(\delta u\) en el extremo apuntalado, como se muestra en la Figura 1.8b. El trabajo virtual total realizado se expresa de la siguiente manera:\[\delta W=R_{B} \delta_{u}-P \frac{X}{L} \delta u\]
Ya que el haz está en equilibrio,\(\delta W=0\) (por la definición del principio de trabajo virtual de un cuerpo).
El principio de trabajo virtual de un cuerpo rígido establece que si un cuerpo rígido está en equilibrio, el trabajo virtual total realizado por todas las fuerzas externas que actúan sobre el cuerpo es cero para cualquier desplazamiento virtual.

\(Fig. 1.8\). Viga en voladizo apoyada.
Idealización estructural
La idealización estructural es un proceso en el que una estructura real y las cargas que actúan sobre ella son reemplazadas por modelos más simples con fines de análisis. Las estructuras de ingeniería civil y sus cargas suelen ser complejas y, por lo tanto, requieren un análisis riguroso. Para que el análisis sea menos engorroso, las estructuras se representan en formas simplificadas. La elección de un modelo simplificado apropiado es un aspecto muy importante del proceso de análisis, ya que la respuesta predictiva de tal idealización debe ser la misma que la de la estructura real. La Figura 1.9a muestra una estructura de viga de brida ancha simplemente soportada y su carga. El plano de la misma viga se muestra en la Figura 1.9b, y la idealización de la viga se muestra en la Figura 1.9c. En la forma idealizada, la viga se representa como una línea a lo largo del eje neutro de la viga, y la carga que actúa sobre la viga se muestra como una carga puntual o concentrada porque la carga ocupa un área que es significativamente menor que el área total de la superficie de la estructura en el plano de su aplicación. Las figuras 1.10a y 1.10b representan un marco y su idealización, respectivamente. En la forma idealizada, las dos columnas y la viga del marco están representadas por líneas que pasan por sus respectivos ejes neutros. Las figuras 1.11a y 1.11b muestran un truss y su idealización. Los miembros de la armadura están representados por líneas que pasan a través de sus respectivos ejes neutros, y se supone que la conexión de los miembros en las juntas es mediante pasadores sin fricción.
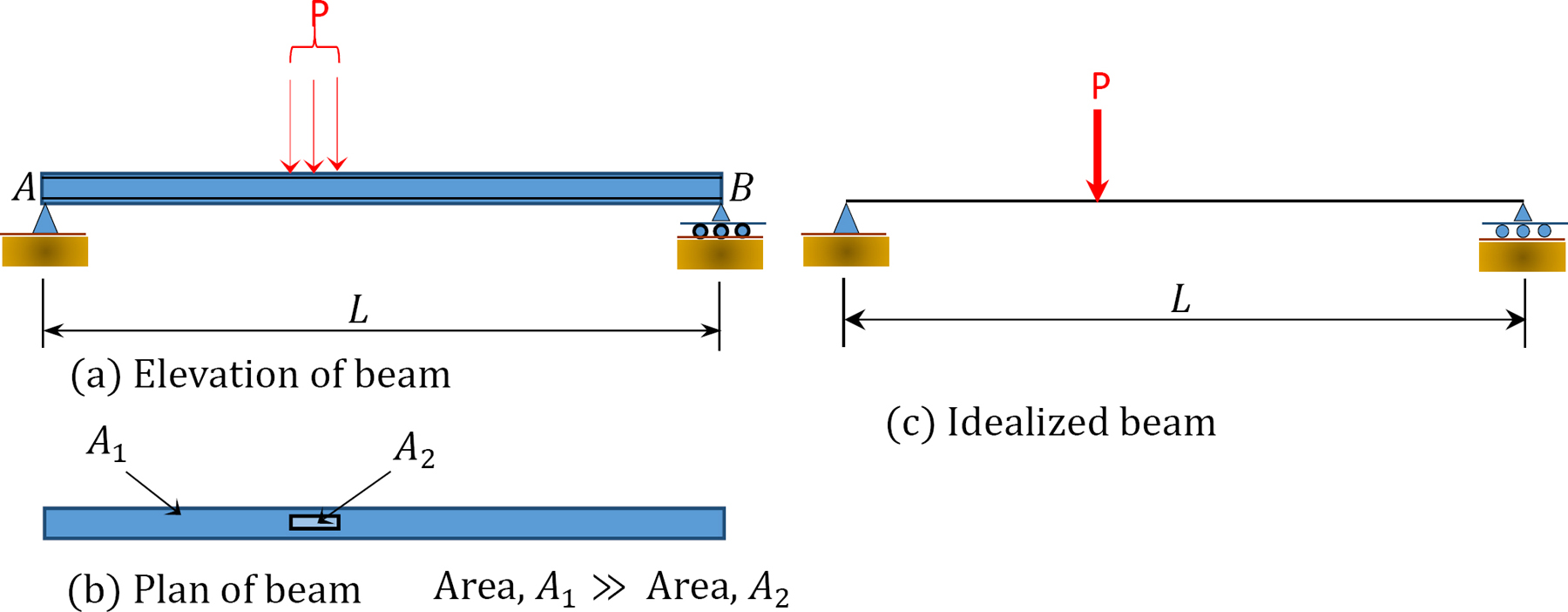
\(Fig. 1.9\). Idealización de viga de brida ancha.

\(Fig. 1.10\). Idealización del marco.
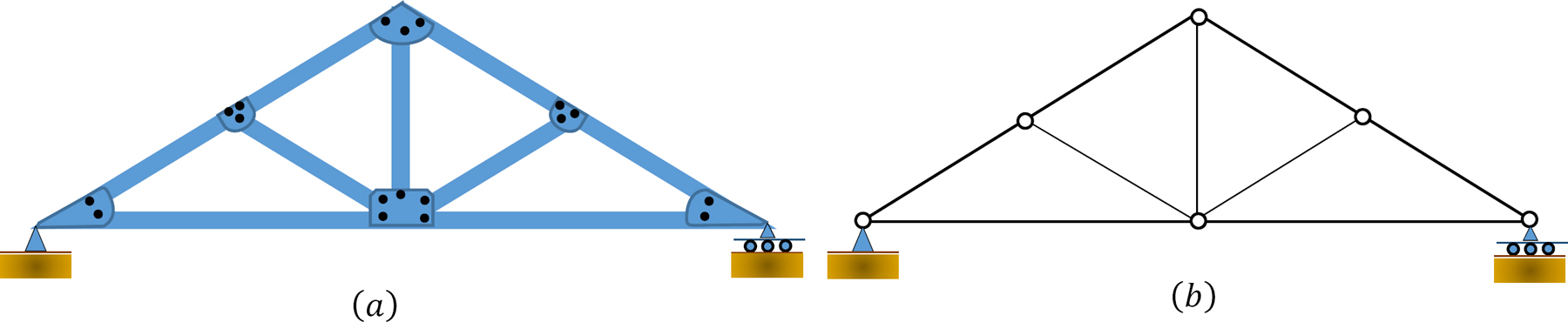
\(Fig. 1.11\). Idealización de truss.
Método de Secciones
El método de secciones es útil a la hora de determinar las fuerzas internas en miembros estructurales que están en equilibrio. El método implica pasar una sección imaginaria a través del miembro estructural para que divida la estructura en dos partes. Las fuerzas de los miembros se determinan considerando el equilibrio de cualquiera de las partes. Para una viga en equilibrio que se somete a carga transversal, como se muestra en la Figura 1.12, las fuerzas internas incluyen una fuerza axial o normal\(N\), fuerza de cizallamiento\(V\), y momentos de flexión,\(M\).
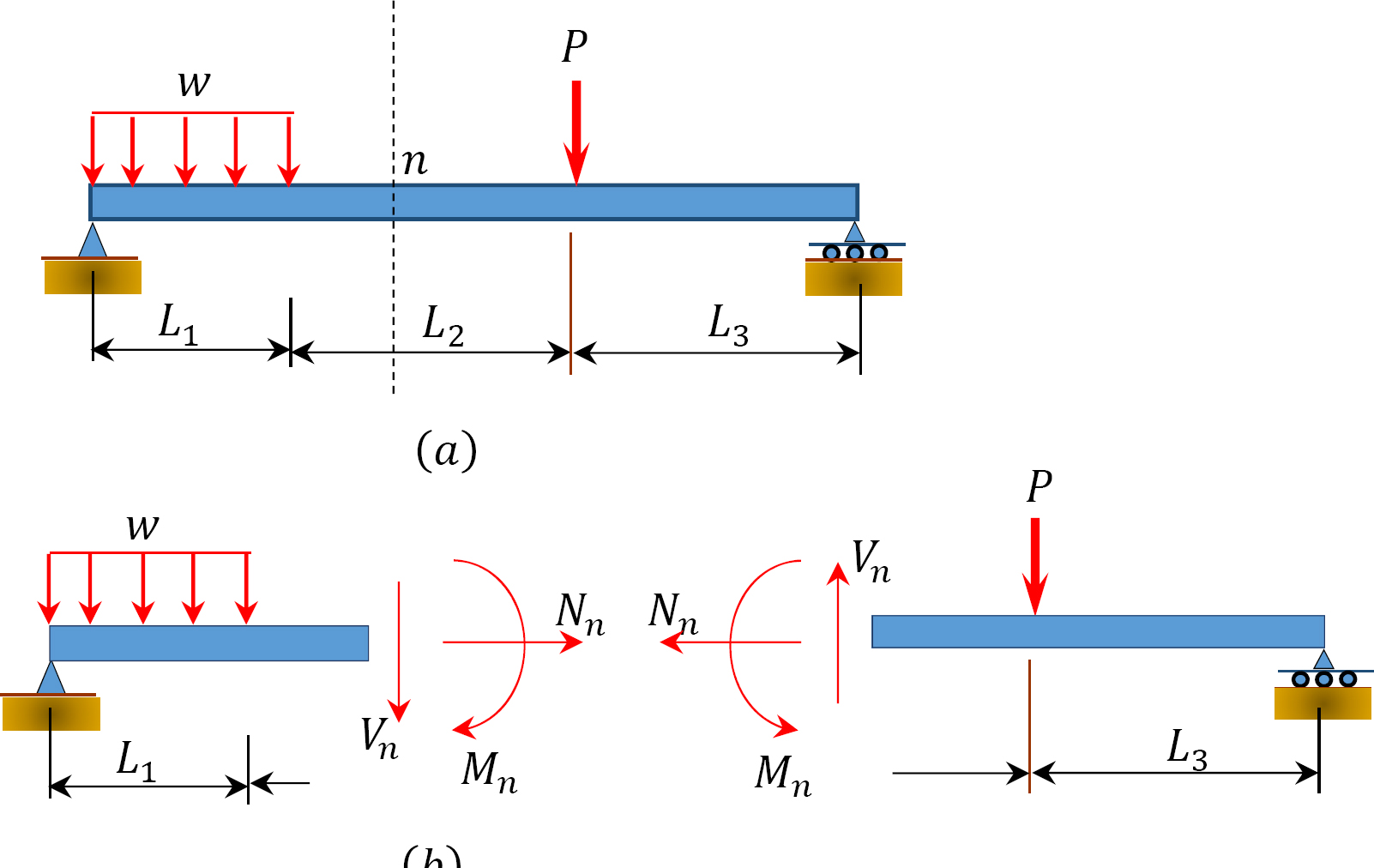
\(Fig. 1.12\). Viga en equilibrio sometida a carga transversal.
1.3.8 Diagrama de cuerpo libre
Un diagrama de cuerpo libre es un diagrama que muestra todas las fuerzas y momentos que actúan sobre la totalidad o una parte de una estructura. Un diagrama de cuerpo libre también debe estar en equilibrio con la estructura real. El diagrama de cuerpo libre de toda la viga mostrada en la Figura 1.13a se representa en la Figura 1.13b. Si se desea el diagrama de cuerpo libre de un segmento de la viga, el segmento se aislará de toda la viga utilizando el método de secciones. Entonces, todas las fuerzas externas sobre el segmento y las fuerzas internas de la parte contigua de la estructura se aplicarán a la parte aislada.

\(Fig. 1.13\)Diagrama de cuerpo libre de una viga.