
21.2: ODEs lineales escalares de segundo orden
- Page ID
- 87771

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Problema con el modelo
Consideremos una ODE canónica de segundo orden,
\ begin {alineado}
m\ frac {d^ {2} u} {d t^ {2}} +c\ frac {d u} {d t} +k u &=f (t),\ quad 0<t<t_ {f},\\
u (0) &=u_ {0},\
\\ frac {d u} {d t} (0) &v={ 0}.
\ end {alineado}
La ODE es de segundo orden, porque la derivada más alta que aparece en la ecuación es la segunda derivada. Debido a que la ecuación es de segundo orden, ahora requerimos dos condiciones iniciales: una para el desplazamiento y otra para la velocidad. Es una ODE lineal porque la ecuación es lineal con respecto a\(u\) y sus derivadas.

Un sistema típico de resorte-masa-amortiguador se rige por este ODE de segundo orden, donde\(u\) está el desplazamiento,\(m\) es la masa,\(c\) es la constante de amortiguación,\(k\) es la constante de resorte y\(f\) es el forzamiento externo. Este sistema es, por supuesto, un oscilador amortiguado, como ahora ilustramos a través de las soluciones clásicas.
Solución Analítica
Ecuación Homogénea: Sin Amortiguar
Consideremos el caso homogéneo sin amortiguar, con\(c = 0\) y\(f = 0\),
\ begin {alineado}
m\ frac {d^ {2} u} {d t^ {2}} +k u &=0,\ quad 0<t<t_ {f},\\
u (0) &=u_ {0},\
\ frac {d u} {d t} (0) &=v_ {0}.
\ end {alineado}
Para resolver la ODE, asumimos soluciones de la forma\(e^{\lambda t}\), que rinde
\(\left(m \lambda^{2}+k\right) e^{\lambda t}=0\).
Esto implica que\(m \lambda^{2}+k=0\), o que\(\lambda\) debe ser una raíz del polinomio característico
\(p(\lambda)=m \lambda^{2}+k=0 \quad \Rightarrow \quad \lambda_{1,2}=\pm i \sqrt{\frac{k}{m}}\).
Definamos la frecuencia natural,\(\omega_{n} \equiv \sqrt{k / m}\). Las raíces de los polinomios característicos son entonces\(\lambda_{1,2}=\pm i \omega_{n}\). La solución a la ODE es así de la forma
\(u(t)=\alpha e^{i \omega_{n} t}+\beta e^{-i \omega_{n} t}\)
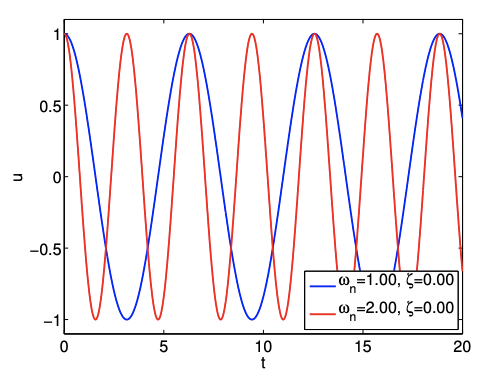
Figura 21.16: Respuesta de sistemas de masa de resorte sin amortiguar.
Reordenando la ecuación,
\ begin {alineado}
u (t) &=\ alfa e^ {i\ omega_ {n} t} +\ beta e^ {-i\ omega_ {n} t} =\ frac {\ alpha+\ beta} {2}\ izquierda (e^ {i\ omega_ {n} t} +e^ {-i\ omega_ {n} t}\ derecha) +\ frac {\ alfa-\ beta} {2}\ izquierda (e^ {i\ omega_ {n} t} -e^ {-i\ omega_ {n} t}\ derecha)\\
& =(\ alpha+\ beta)\ cos\ izquierda (\ omega_ {n} t\ derecha) +i ( \ alfa-\ beta)\ sin\ izquierda (\ omega_ {n} t\ derecha)
\ final {alineado}
Sin pérdida de generalidad, redefinamos los coeficientes por\(c_{1}=\alpha+\beta\) y\(c_{2}=i(\alpha-\beta)\). La forma general de la solución es así
\(u(t)=c_{1} \cos \left(\omega_{n} t\right)+c_{2} \sin \left(\omega_{n} t\right)\).
Los coeficientes\(c_{1}\) y\(c_{2}\) son especificados por la condición inicial. En particular,
\ begin {alineado}
u (t=0) &=c_ {1} =u_ {0} &\ Rightarrow & c_ {1} =u_ {0}\
\ frac {d u} {d t} (t=0) &=c_ {2}\ omega_ {n} =v_ {0} &\ Rightarrow & c_ {2} =\ frac {v_ {0}} {\ omega_ {n}}
\ fin {alineado}
Así, la solución a la ecuación homogénea no amortiguada es
\(u(t)=u_{0} \cos \left(\omega_{n} t\right)+\frac{v_{0}}{\omega_{n}} \sin \left(\omega_{n} t\right)\)
que representa una sinusoide (no decayente).
Ejemplo 21.2.1 Sistema de masa de resorte sin amortiguar
Consideremos dos sistemas de masa de resorte con las frecuencias naturales\(\omega_{n}=1.0\) y\(2.0\). Las respuestas de los sistemas al desplazamiento inicial de se\(u(t=0)=1.0\) muestran en la Figura 21.16. A medida que los sistemas no se amortiguan, las amplitudes de las oscilaciones no disminuyen con el tiempo.
_______________________ . _______________________
Ecuación Homogénea: Subamortiguado
Consideremos ahora el caso homogéneo\((f = 0)\) pero con amortiguación finita (pero débil)
\(m \frac{d^{2} u}{d t^{2}}+c \frac{d u}{d t}+k u=0, \quad 0<t<t_{f}\),
\ begin {array} {r}
u (0) =u_ {0},\\
\ frac {d u} {d t} (0) =v_ {0}.
\ end {matriz}
Para resolver la ODE, nuevamente asumimos el comportamiento de la forma\(u=e^{\lambda e}\). Ahora las raíces de la característica: polinomio están dadas por
\(p(\lambda)=m \lambda^{2}+c \lambda+k=0 \quad \Rightarrow \quad \lambda_{1,2}=-\frac{c}{2 m} \pm \sqrt{\left(\frac{c}{2 m}\right)^{2}-\frac{k}{m}}\).
Vamos a reescribir las raíces como
\(\lambda_{1,2}=-\frac{c}{2 m} \pm \sqrt{\left(\frac{c}{2 m}\right)^{2}-\frac{k}{m}}=-\sqrt{\frac{k}{m}} \frac{c}{2 \sqrt{m k}} \pm \sqrt{\frac{k}{m}} \sqrt{\frac{c^{2}}{4 m k}-1}\).
Para mayor comodidad, definamos la relación de amortiguación como
\(\zeta=\frac{c}{2 \sqrt{m k}}=\frac{c}{2 m \omega_{n}}\)
Junto con la definición de frecuencia natural\(\omega_{n}=\sqrt{k / m}\), podemos simplificar las raíces para
\(\lambda_{1,2}=-\zeta \omega_{n} \pm \omega_{n} \sqrt{\zeta^{2}-1}\).
La caja subamortiguada se caracteriza por la condición
\(\zeta^{2}-1<0\),
es decir,\(\zeta<1\)
En este caso, las raíces se pueden expresar convenientemente como
\(\lambda_{1,2}=-\zeta \omega_{n} \pm i \omega_{n} \sqrt{1-\zeta^{2}}=-\zeta \omega_{n} \pm i \omega_{d}\),
donde\(\omega_{d} \equiv \omega_{n} \sqrt{1-\zeta^{2}}\) está la frecuencia amortiguada. La solución al sistema homogéneo subamortiguado es
\(u(t)=\alpha e^{-\zeta \omega_{n} t+i \omega_{d} t}+\beta e^{-\zeta \omega_{n} t-i i_{2} t} \text {. }\)
Usando una técnica similar a la utilizada para el caso sin amortiguar, podemos simplificar la expresión para
\(u(t)=e^{-\zeta \Delta_{0} t}\left(c_{1} \cos \left(\omega_{d} t\right)+c_{2} \sin \left(\omega_{d} t\right)\right)\).
Sustitución de los rendimientos de la condición inicial
\(u(t)=e^{-\zeta \omega_{n} t}\left(u_{0} \cos \left(\omega_{d} t\right)+\frac{v_{0}+\zeta \omega_{n} t_{0}}{\omega_{d}} \sin \left(\omega_{d} t\right)\right)\).
Por lo tanto, la solución es sinusoidal con amplitud exponencialmente decreciente. La tasa de decaimiento se establece por la relación de amortiguación,\(\zeta\). Si\(\zeta<1\), entonces la oscilación decae lentamente, a lo largo de muchos períodos.

Ejemplo 21.2.2 Sistema amortiguador-masa-amortiguador subamortiguado
Consideremos dos sistemas amortiguadores de masa-resorte con amortiguación insuficiente con
\ begin {array} {ll}\ text {Sistema 1:}\ quad\ omega_ {n} =1.0\ quad\ text {y} &\ zeta=0.1\\\ text {Sistema 2.}\ quad\ omega_ {n} =1.0\ quad\ text {y} &\ zeta=0.5\ end {array}
Las respuestas de los sistemas al desplazamiento inicial de se\(u(t=0)=1.0\) muestran en la Figura 21.17. A diferencia de los sistemas no amortiguados considerados en el Ejemplo 21.2.1, la amplitud de las cocillaciones decae con el tiempo; la oscilación del Sistema 2 con un coeflictent de mayor amortiguación decae más rápido que la del Sistema 1.
_______________________ . _______________________
Ecuación Homogénea: Sobreamortiguado
En el caso subamortiguado, asumimos\(\zeta<1\). Si\(\zeta>1\), entonces tenemos un sistema sobreamortiguado. En este caso, escribimos las raíces como
\(\lambda_{1,2}=-\omega_{n}\left(\zeta \pm \sqrt{\zeta^{2}-1}\right)\)
ambos de los cuales son reales. La solución es dada entonces por
\(u(t)=c_{1} e^{\lambda_{1} t}+c_{2} e^{\lambda_{2} t}\).
La sustitución de los rendimientos de las condiciones iniciales
\(c_{1}=\frac{\lambda_{2} u_{0}-t_{0}}{\lambda_{2}-\lambda_{1}} \text { and } c_{2}=\frac{-\lambda_{1} u_{0}+v_{0}}{\lambda_{2}-\lambda_{1}}\).
La solución es una combinación lineal de dos exponenciales que decaen con constantes de tiempo de\(1 /\left|\lambda_{1}\right|\) y\(1 /\left|\lambda_{2}\right|\), respectivamente. Porque\(\left|\lambda_{1}\right|>\left|\lambda_{2}\right|,\left|\lambda_{2}\right|\) dicta el comportamiento de decaimiento a largo plazo del sistema. Para\(\zeta \rightarrow \infty, \lambda_{2}\) se comporta como\(-\omega_{n} /(2 \zeta)=-k / c\).
Ejemplo 21.2.3 Sistema amortiguador-masa-amortiguador sobreamortiguado
Consideremos dos sistemas amortiguadores de masa-resorte sobreamortiguados con
\ begin {array} {ll}\ text {Sistema 1:}\ quad\ omega_ {n} =1.0\ quad\ text {y} &\ zeta=0.1\\\ text {Sistema 2.}\ quad\ omega_ {n} =1.0\ quad\ text {y} &\ zeta=0.5\ end {array}

Las respuestas de los sistemas al desplazamiento inicial de se\(u(t = 0) = 1.0\) muestran en la Figura 21.17. A medida que los sistemas están sobreamortiguados, exhiben comportamientos no oscilatorios. Tenga en cuenta que la oscilación del Sistema 2 con un coeficiente de amortiguación mayor decae más lentamente que la del Sistema 1. Esto contrasta con los casos subamortiguados considerados en el Ejemplo 21.2.2, en los que la oscilación del sistema con un mayor coeficiente de amortiguación decae más rápidamente.
_______________________ . _______________________
Forzado sinusoidal
Consideremos un forzamiento sinusoidal del sistema de segundo orden. En particular, consideramos un sistema de la forma
\(m \frac{d^{2} u}{d t^{2}}+c \frac{d u}{d t}+k u=A \cos (\omega t)\).
En términos de la frecuencia natural y la relación de amortiguación previamente definida, podemos reescribir el sistema como
\(\frac{d^{2} u}{d t^{2}}+2 \zeta \omega_{n} \frac{d u}{d t}+\omega_{n}^{2} u=\frac{A}{m} \cos (\omega t)\)
Una solución particular es de la forma
\(u_{p}(t)=\alpha \cos (\omega t)+\beta \sin (\omega t)\)
Sustituyendo la forma asumida de solución particular en la ecuación gobernante, obtenemos
\ begin {alineado}
0=&\ frac {d^ {2} u_ {p}} {d t^ {2}} +2\ zeta\ omega_ {n}\ frac {d u_ {p}} {d t} +\ omega_ {n} ^ {2} u_ {p} -\ frac {A} {m}\ cos (\ omega t)\
=&-\ omega\ omega^ {2}\ cos (\ omega t) -\ beta\ omega^ {2}\ sin (\ omega t) +2\ zeta\ omega_ {n} (-\ alfa\ omega\ sin (\ omega t) +\ beta\ omega\ cos (\ omega t))\\
&+\ omega_ {n} ^ {2} (\ alfa\ cos (\ omega t) +\ beta\ sin (\ omega t)) -A\ cos (\ omega t)
\ fin {alineado}

A continuación coincidimos términos en pecado y cos para obtener
\(\alpha\left(\omega_{n}^{2}-\omega^{2}\right)+\beta\left(2 \zeta \omega \omega_{n}\right)=\frac{A}{m}\),
\(\beta\left(\omega_{n}^{2}-\omega^{2}\right)-\alpha\left(2 \zeta \omega \omega_{n}\right)=0 \text {, }\)
y resolver para los coeficientes,
\ begin {alineado}
&\ alpha=\ frac {\ izquierda (\ omega_ {n} ^ {2} -\ omega^ {2}\ derecha)} {\ izquierda (\ omega_ {n} ^ {2} -\ omega^ {2}\ derecha) ^ {2} +\ izquierda (2\ zeta omega\ omega_ {n}\ derecha) ^ {2}\ frac {A} {m} =\ frac {1-r^ {2}} {\ izquierda (1-r^ {2}\ derecha) ^ {2} + (2\ zeta r) ^ {2}}\ frac {A} {m\ omega_ {n} ^ {2}} =\ frac {1-r^ {2}} {\ izquierda (1-r^ {2}\ derecha) ^ {2} + (2 \ zeta r) ^ {2}}\ frac {A} {k},\\
&\ beta=\ frac {\ left (2\ zeta\ omega\ omega_ {n}\ derecha)} {\ izquierda (\ omega_ {n} ^ {2} -\ omega^ {2}\ derecha) ^ {2} +\ izquierda (2\ zeta\ omega\ omega^ _ {n}\ derecha) ^ {2}}\ frac {A} {m} =\ frac {2\ zeta r} {\ izquierda (1-r^ {2}\ derecha) ^ {2} + (2\ zeta r) ^ {2}}\ frac {A} {m\ omega\ omega_ {n} ^ {2}} =\ frac {2\ zeta} {\ izquierda (1-r^ {2}\ derecha) ^ {2} + (2\ zeta r) ^ {2}}\ frac {A} {k},
\ end {alineado}
donde\(r \equiv \omega / \omega_{n}\) está la relación entre la frecuencia forzada y la frecuencia natural.
Usando una identidad trigonométrica, podemos calcular la amplitud de la solución particular como
\(A_{p}=\sqrt{\alpha^{2}+\beta^{2}}=\frac{\sqrt{\left(1-r^{2}\right)^{2}+(2 \zeta r)^{2}}}{\left(1-r^{2}\right)^{2}+(2 \zeta r)^{2}} \frac{A}{k}=\frac{1}{\sqrt{\left(1-r^{2}\right)^{2}+(2 \zeta r)^{2}}} \frac{A}{k}\).
Tenga en cuenta que la magnitud de la amplificación varía con la relación de frecuencia,\(r\), y la relación de amortiguación,\(\zeta\). Esta variación en el factor de amplificación se representa gráficamente en la Figura 21.19. Para un dado\(\zeta\), el 1/ (26). Este incremento en la magnitud de oscilación cerca de la frecuencia natural del sistema se conoce como resonancia. La frecuencia natural es claramente crucial para comprender la respuesta forzada del sistema, en particular para sistemas ligeramente amortiguados.