
5.5: Magnetización




- Última actualización
- 30 oct 2022
- Guardar como PDF

( \newcommand{\kernel}{\mathrm{null}\,}\)
Nuestro desarrollo hasta ahora se ha restringido a campos magnéticos en el espacio libre derivados de distribuciones de corriente impuestas. Así como pequeños desplazamientos de carga en materiales dieléctricos contribuyeron al campo eléctrico, los movimientos atómicos constituyen corrientes microscópicas, que también contribuyen al campo magnético. Existe una analogía directa entre polarización y magnetización, por lo que nuestro desarrollo será paralelo al de la Sección 3-1.
5-5-1 El dipolo magnético
Los modelos atómicos clásicos describen un átomo como electrones orbitantes alrededor de un núcleo cargado positivamente, como en la Figura 5-13.
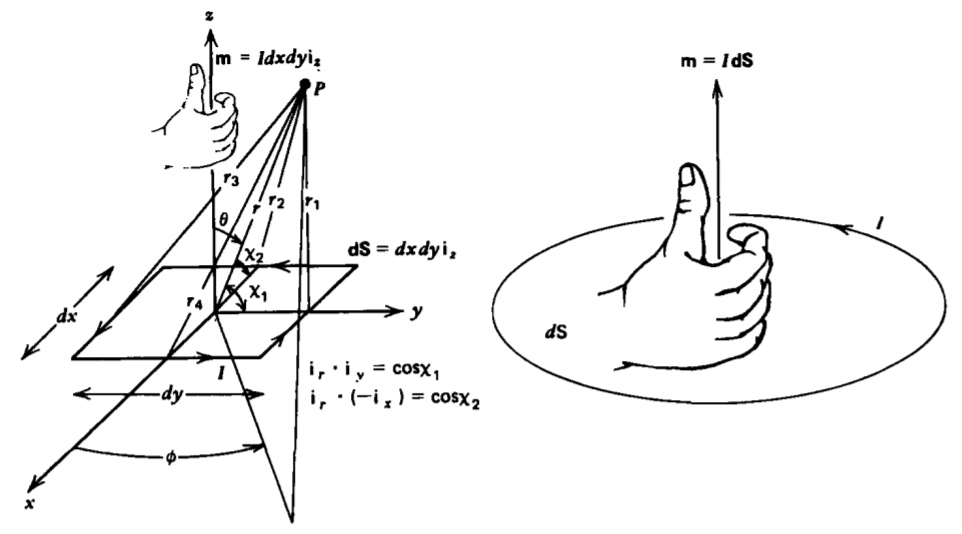
También se puede imaginar que el núcleo y el electrón están girando. El modelo más simple para estas corrientes atómicas es análogo al dipolo eléctrico y consiste en un pequeño bucle de corriente de área d S que transporta una corriente I, como en la Figura 5-14. Debido a que las dimensiones atómicas son tan pequeñas, sólo nos interesa el campo magnético lejos de este dipolo magnético. Entonces la forma del bucle no es importante, así por simplicidad lo tomamos como rectangular
El potencial de vector para este bucle es entonces
A=μ0I4π[dx(1r3−1r1)ix+dy(1r4−1r2)iy]
donde asumimos que la distancia desde cualquier punto de cada lado del bucle hasta el punto de campo P es aproximadamente constante.
Utilizando la ley de los cosenos, estas distancias se relacionan como
r21=r2+(dy2)2−rdycosχ1;r22=r2+(dx2)2−rdxcosχ2r23=r2+(dy2)2+rdycosχ1,r24=r2+(dx2)2+rdxcosχ2
donde los ángulosχ1 yχ2 están relacionados con las coordenadas esféricas de la Tabla 1-2 como
ir⋅iy=cosχ1=sinθsinϕ−ir⋅ix=cosχ2=−sinθcosϕ
En el campo lejano, el límite (1) se convierte
limr>>dxd>>dyA=μ0I4π[dxr(1[1+dydr(dy2r+2cosχ1)]1/2−1[1+dy2r(dy2r−2cosχ1)]1/2)+dyr(1[1+dx2r(dx2r+2cosχ2)]1/2−1[1+dx2r(dx2r−2cosχ2)]1/2)]≈−μ0I4πr2dxdy[cosχ1ix+cosχ2iy]
El uso de (3), (4) reduce aún más a
A=μ0IdS4πr2sinθ[−sinϕix+cosϕiy]=μ0IdS4πr2sinθiϕ
donde nuevamente usamos la Tabla 1-2 para escribir el término de vector de unidad cartesiana entre corchetes comoiϕ. El momento dipolo magnético m se define como el vector en la dirección perpendicular al bucle (en este casoiz) por la regla de la derecha con magnitud igual al producto de la corriente y el área del bucle:
m=IdSiz=IdS
Entonces el potencial vectorial puede escribirse de manera más general como
A=μ0m4πr2sinθiϕ=μ0m4πr2×ir
con campo magnético asociado
B=∇×A=1rsinθ∂∂θ(Aϕsinθ)ir−1r∂∂r(rAϕ)iϕ=μ0m4πr3[2cosθir+sinθiθ]
Este campo es idéntico en forma al campo dipolar eléctrico de la Sección 3-1-1 si reemplazamosp/ε0 porμ0m.
5-5-2 Corrientes de Magnetización
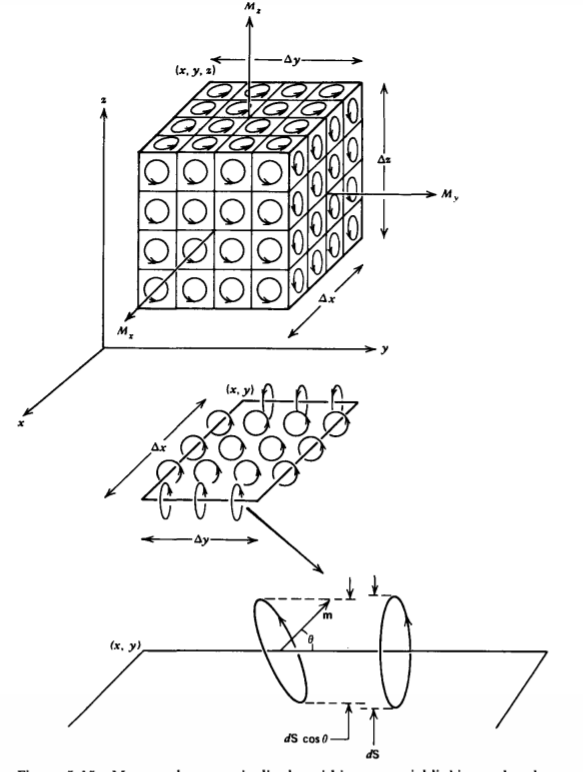
Amperios modelaron materiales magnéticos como teniendo el volumen llenado con tales bucles de corriente circulante infinitesimal con densidad numérica N, como se ilustra en la Figura 5-15. El vector de magnetización M se define entonces como la densidad del dipolo magnético:
M=Nm=NIdSamp/m
Para el contorno de tamaño diferencial en el plano xy mostrado en la Figura 5-15, solo aquellos dipolos con momentos en las direcciones x o y (así z componentes de las corrientes) darán lugar a corrientes que cruzan perpendicularmente a través de la superficie delimitada por el contorno. Esos dipolos completamente dentro del contorno no dan corriente neta ya que la corriente pasa por el contorno dos veces, una vez en la dirección z positiva y en su retorno en la dirección z negativa. Sólo esos dipolos a cada lado de los bordes-para que la corriente sólo pase por el contorno una vez, con el retorno fuera del contorno-dan una corriente neta a través del bucle.
Debido a que la longitud de los lados del contornoΔx yΔy son de tamaño diferencial, asumimos que los dipolos a lo largo de cada borde no cambian de magnitud ni dirección. Entonces la corriente total neta vinculada por el contorno cerca de cada lado es igual al producto de la corriente por dipolo I y el número de dipolos que apenas pasan por el contorno una vez. Si el vector normal al bucle dipolo (en la dirección de m) forma un ánguloθ con respecto a la dirección del lado del contorno en la posición x, la corriente neta vinculada a lo largo de la línea en x es
−INdSΔycosθ|x=−My(x)Δy
El signo menos surge porque la corriente dentro del contorno adyacente a la línea en la coordenada x fluye en la dirección - z.
Del mismo modo, cerca del borde en la coordenadax+Δx, la corriente neta vinculada perpendicular al contorno es
INdSΔycosθ|x+Δx=My(x+Δx)Δy
A lo largo de los bordes en y yy+Δy, las contribuciones actuales son
INdSΔxcosθ|y=Mx(y)Δx=−INdSΔxcosθ|y+Δy=−Mx(y+Δy)Δx
La corriente total en la dirección z vinculada por este contorno es así la suma de contribuciones en (10) - (12):
Iztot=ΔxΔ(My(x+Δx)−My(x)Δx−Mx(y+Δy)−Mx(y)Δy)
Si la magnetización es uniforme, la corriente total neta es cero ya que la corriente que pasa por el bucle en un lado es cancelada por la corriente que fluye en dirección opuesta en el otro lado. Solo si la magnetización cambia con la posición puede haber una corriente neta a través de la superficie del bucle. Esto se puede lograr si bien la corriente por dipolo, área por dipolo, densidad de dipolos, de ángulo de orientación de los dipolos es una función de posición.
En el límite comoΔx yΔy se vuelven pequeños, términos en el lado derecho en (13) definen derivadas parciales para que la corriente por unidad de área en la dirección z sea
limΔx→0Δy→0Jz=Iz totΔxΔy=(∂My∂x−∂Mx∂y)=(∇×M)z
que reconocemos como el componente z del rizo de la magnetización. Si hubiéramos orientado nuestro bucle en los planos xz o yz, los componentes de densidad de corriente obedecerían de manera similar las relaciones
Jy=(∂Mx∂z−∂Mz∂x)=(∇×M)yJx=(∂Mz∂y−∂My∂z)=(∇×M)x
donde subindicamos la densidad de corriente con una m para representar la densidad de corriente de magnetización, a menudo llamada densidad de corriente Amperiano.
Estas corrientes son también fuentes del campo magnético y pueden ser utilizadas en la ley de Ampere como
∇×Bμ0=Jm+Jf=Jf+∇×M
dondeJf se encuentra la corriente libre debido al movimiento de cargas libres en contraste con la corriente de magnetizaciónJm, que se debe al movimiento de cargas encuadernadas en los materiales.
Como solo podemos imponer corrientes libres, es conveniente definir el vector H como la intensidad del campo magnético a distinguir de B, que ahora llamaremos densidad de flujo magnético:
H=Bμ0−M⇒B=μ0(H+M)
Entonces (17) se puede refundir como
∇×(Bμ0−M)=∇×H=Jf
Las relaciones de divergencia y flujo de la Sección 5-3-1 no han cambiado y están en términos de la densidad de flujo magnético B. En el espacio libre, donde M = 0, la relación de (19) entre B y H se reduce a
B=μ0H
Esto es análogo al desarrollo de la polarización con las relaciones de D, E y P. Obsérvese que en (18), el parámetro constanteμ0 multiplica tanto H como M, a diferencia de la permitividadμ0 que solo multiplica E.
La ecuación (19) se puede poner en una forma integral equivalente usando el teorema de Stokes:
∫S(∇×H)⋅dS=∮LH⋅dl=∫SJf⋅dS
La densidad de corriente libreJf es la fuente del campo H, la densidad de corriente de magnetizaciónJm. es la fuente del campo M, mientras que la corriente totalJf+Jm,, es la fuente del campo B.
5-5-3 Materiales Magnéticos
Existen analogías directas entre los procesos de polarización que se encuentran en los efectos dieléctricos y magnéticos. La ley constitutiva que relaciona la magnetización M con un campo magnético aplicado H se encuentra aplicando la fuerza Lorentz a nuestros modelos atómicos.
a) Diamagnetismo
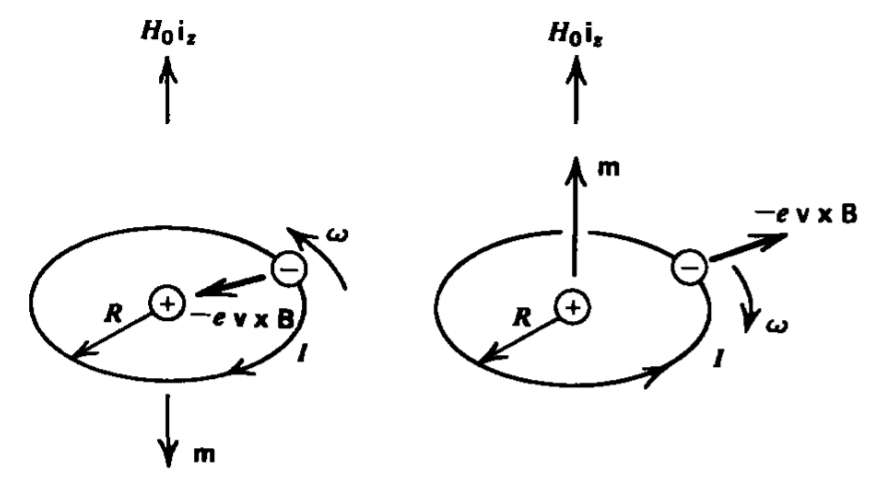
Los electrones orbitantes como bucles de corriente atómica son análogos a la polarización electrónica, con la corriente en la dirección opuesta a su velocidad. Si el electrón (e = 1.6 x 10-9 coul) gira a velocidad angularω en el radio R, como en la Figura 5-16, la corriente y el momento dipolar son
I=eω2π,m=IπR2=eω2R2
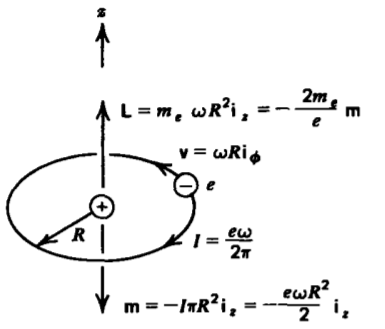
Tenga en cuenta que el momento angular L y el momento magnético m están dirigidos de manera opuesta y están relacionados como
L=meRir×v=meωR2iz=−2meem
donde m e = 9.1 x 10 -31 kg es la masa electrónica.
Dado que la teoría cuántica requiere que el momento angular se cuantifique en unidades deh/2π, donde la constante de Planck esh=6.62×10−34 joule-seg, la unidad más pequeña de momento magnético, conocida como el magnetón Bohr, es
mB=eh4πme≈9.3×10−24amp m2
Dentro de un material homogéneo estos dipolos se distribuyen aleatoriamente de manera que por cada electrón que orbita en una dirección, otro electrón cercano está orbitando en dirección opuesta para que en ausencia de un campo magnético aplicado no haya magnetización neta.
La fuerza de atracción coulómbica sobre el electrón orbitante hacia el núcleo con número atómico Z se equilibra por la fuerza centrífuga:
meω2R=Ze24πε0R2
Dado que el lado izquierdo es solo proporcional al cuadrado del momento angular cuantificado, también se cuantifica el radio de órbita R para el que el valor más pequeño es
R=4πε0meZe2(h2π)2≈5×10−11Zm
con velocidad angular resultante
ω=Z2e4me(4πε0)2(h/2π)3≈1.3×1016Z2
CuandoH0iz se aplica un campo magnético, como en la Figura 5-17, los bucles de electrones con momento magnético opuesto al campo sienten una fuerza radial adicional hacia adentro, mientras que los bucles con momento colineal y campo sienten una fuerza radial hacia afuera. Dado que el radio orbital R no puede cambiar porque está cuantificado, esta fuerza magnética da como resultado un cambio de velocidad orbitalΔω:
me(ω+Δω1)2R=e(Ze4πε0R2+(ω+Δω1)Rμ0H0)me(ω+Δω2)2R=e(Ze4πε0R2−(ω+Δω2)Rμ0H0)
donde el primer electrón acelera mientras que el segundo se ralentiza.
Debido a que el cambio de velocidadΔω es mucho menor que la velocidad naturalω, resolvemos (28) aproximadamente como
Δω1=eωμ0H02meω−eμ0H0Δω2=−eωμ0H02meω+eμ0H0
donde descuidamos cantidades de orden(Δω)2. Sin embargo, incluso con intensidades de campo magnético muy altas deH0106 amp/m vemos que generalmente
eμ0H0<<2meω0(1.6×10−19)(4π10−7)106<<2(9.1×10−31)(1.3×1016)
de manera que (29) reduce aún más a
Δω1≈−Δω2≈eμ0H02me≈1.1×105H0
El momento magnético neto para este par de bucles,
m=eR22(ω2−ω1)=−eR2Δω1=−e2μ0R22meH0
es opuesto en dirección al campo magnético aplicado.
Si tenemos N pares de bucles por unidad de volumen, el campo de magnetización es
M=Nm=−Ne2μ0R22meH0iz
que también se dirige de manera opuesta al campo magnético aplicado
Dado que la magnetización está linealmente relacionada con el campo, definimos la susceptibilidad magnéticaχm como
M=χmH,χm=−Ne2μ0R22me
dondeχm es negativo. La densidad de flujo magnético es entonces
B=μ0(H+M)=μ0(1+χm)H=μ0μrH=μH
dondeμr=1+χm se llama la permeabilidad relativa yμ es la permeabilidad. En el espacio libreχm=0 para queμr=1 yμ=μ0. La última relación en (35) suele ser conveniente de usar, ya que todos los resultados en el espacio libre siguen siendo correctos dentro del material permeable lineal si reemplazamosμ0 porμ. En materiales diamagnéticos, donde la susceptibilidad es negativa, tenemos esoμr<1,μ<μ0. Sin embargo, sustituyendo en nuestros valores típicos
χm=−Ne2μ0R22m.≈4.4×10−35Z2N
vemos que incluso conN≈1030 átomos/m 3,χm es mucho menor que la unidad por lo que los efectos diamagnéticos son muy pequeños.
b) Paramagnetismo
En cuanto a la polarización de orientación, un campo magnético aplicado ejerce un par en cada dipolo tendiendo a alinear su momento con el campo, como se ilustra para el dipolo magnético rectangular con momento en ánguloθ con un campo magnético uniforme B en la Figura 5-18a. La fuerza en cada pierna es
df1=−df2=IΔxΔxix×B=IΔx[Byiz−Bziy]df3=−df4=IΔyiy×B=IΔy(−Bxiz+Bzix)
En un campo magnético uniforme, las fuerzas sobre patas opuestas son iguales en magnitud pero opuestas en dirección para que la red

la fuerza en el bucle es cero. Sin embargo, hay un par:
T=4∑n=1r×dfn=Δy2(−iy×df1+iy×df2)+Δx2(ix×df3−ix×df4)=IΔxΔy(Bxiy−Byix)=m×B
La cantidad incremental de trabajo necesario para girar el dipolo en un ángulo pequeñodθ es
dW=Tdθ=mμ0H0sinθdθ
de manera que la cantidad total de trabajo necesaria para girar el dipolo deθ=0 a cualquier valor deθ es
W=∫θ0Tdθ=−mμ0H0cosθ|θ0=mμ0H0(1−cosθ)
Esta obra se almacena como energía potencial, pues si se libera el dipolo intentará orientarse con su momento paralelo al campo. La agitación térmica se opone a esta alineación donde la estadística de Boltzmann describe la densidad numérica de dipolos que tienen energía W como
n=n1e−W/kT=n1e−mμ0H0(1−cosθ)/kT=n0emμ0H0cosθ/kT
donde agrupamos la contribución de energía constante en (40) dentro de la amplitudn0, que se encuentra especificando la densidad numérica promedio de los dipolos N dentro de una esfera de radio R:
N=143πR3∫πθ=0∫2πϕ=0∫Rr=0n0eacosθr2sinθdrdθdϕ=n02∫πθ=0sinθeacosthetadθ
donde dejamos
a=mμ0H0/kT
Con el cambio de variable
u=acosθ,du=−asinθdθ
la integración en (42) se convierte
N=−n02a∫−aaeudu=n0asinha
para que (41) se convierta
n=Nasinhaeacosθ
De la Figura 5-18b vemos que todos los dipolos en el caparazónθ a lo largo del intervalo paraθ+dθ contribuir a una magnetización neta. que está en la dirección del campo magnético aplicado:
dM=mn43πR3cosθr2sinθdrdθdϕ
de manera que la magnetización total debida a todos los dipolos dentro de la esfera es
M=maN2sinha∫πθ=0sinθcosθeacosθdθ
Nuevamente utilizando el cambio de variable en (44), (48) se integra a
M=−mN2asinha∫−aaueudu=−mN2asinhaeu(u−1)|aa=−mN2asinha[e−a(−a−1)−ea(a−1)]=−mNasinha[−acosha+sinha]=mN[cotha−1/a]
que se conoce como la ecuación de Langevin y se representa en función de la temperatura recíproca en la Figura 5-19. A bajas temperaturas (alta a) la magnetización se satura a M = mN ya que todos los dipolos tienen sus momentos alineados con el campo. A temperatura ambiente, a suele ser muy pequeño. Usando los parámetros en (26) y (27) en un campo magnético fuerte deH0=106 amps/m, a es mucho menor que la unidad:
a=mμ0H0kT=eω2R2μ0H0kT≈8×10−4
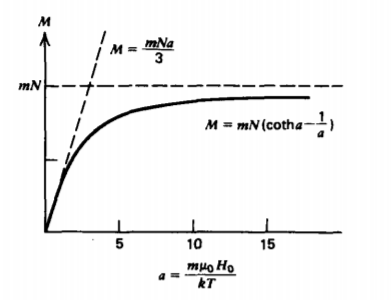
En este límite, la ecuación de Langevin simplifica a
lima<<1M≈mN[1+a2/2a+a3/6−1a]≈mN((1+a2/2)(1−a3/6)a=1a]≈mNa3≈μ0m2N3kTH0
En este límite la susceptibilidad magnéticaχm es positiva:
M=χmH,χm=μ0m2N3kT
pero incluso conN≈1030 átomos/m 3, sigue siendo muy pequeño:
χm≈7×10−4
c) Ferromagnetismo
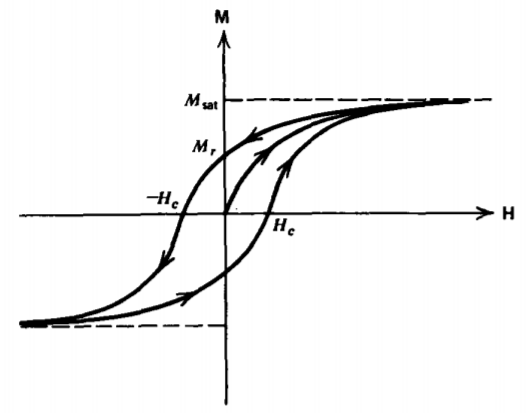
En cuanto a los ferroeléctricos (ver Sección 3-1-5), el acoplamiento suficientemente alto entre dipolos magnéticos adyacentes en algunas aleaciones de hierro hace que se alineen espontáneamente incluso en ausencia de un campo magnético aplicado. Cada uno de estos dominios microscópicos actúan como un imán permanente, pero se distribuyen aleatoriamente por todo el material para que la magnetización macroscópica sea cero. Cuando se aplica un campo magnético, los dipolos tienden a alinearse con el campo para que los dominios con una magnetización a lo largo del campo crezcan a expensas de los dominios no alineados.
El comportamiento similar a la fricción del movimiento de la pared del dominio es un proceso con pérdida de manera que la magnetización varía con el campo magnético de manera no lineal, como lo describe el bucle de histéresis en la Figura 5-20. Un campo fuerte alinea todos los dominios con la saturación. Al disminuir H, la magnetización va a la zaga de manera que existe una magnetización remanente Mr incluso con campo cero. En esta condición tenemos un imán permanente. Para llevar la magnetización a cero se requiere un campo coercitivo negativo - H c.
Aunque no lineal, la principal importancia de ingeniería de los materiales ferromagnéticos es que la permeabilidad relativaμr suele ser de miles:
μ=μrμ0=B/H
Este valor suele ser tan alto que en aplicaciones de ingeniería lo idealizamos para que sea infinito. En este límite
limμ→∞B=μH⇒H=0,B finite
el campo H se convierte en cero para mantener el campo B finito.
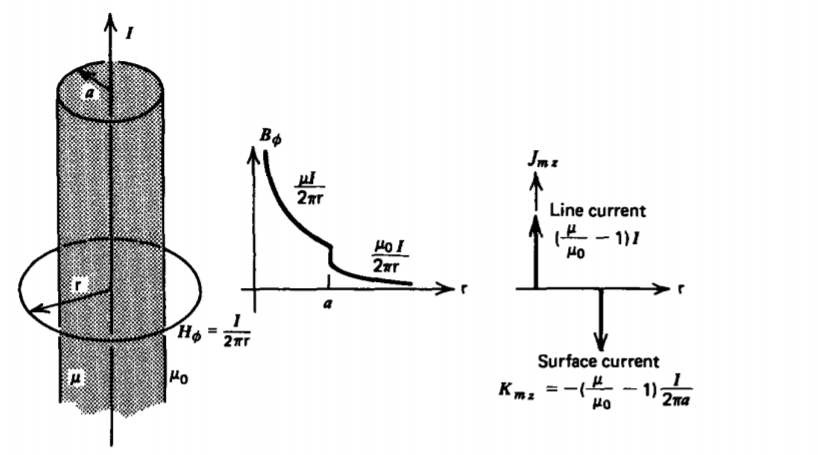
Una corriente de línea I de extensión infinita se encuentra dentro de un cilindro de radio a que tiene permeabilidadμ, como en la Figura 5-21. El cilindro está rodeado de espacio libre. ¿Cuáles son los campos B, H y M en todas partes? ¿Cuál es la corriente de magnetización?
Solución
Elija un contorno circular de radio r alrededor de la corriente. Utilizando la forma integral de la ley de Ampere, (21), el campo H es de la misma forma ya sea dentro o fuera del cilindro:
∮LH⋅dl=Hϕ2πr=I⇒Hϕ=I2πr
La densidad de flujo magnético difiere en cada región porque la permeabilidad difiere:
Bϕ={μHϕ=μI2πr,0<r<aμ0Hϕ=μ0I2πr,r>a
La magnetización se obtiene de la relación
M=Bμ0−H
como
Mϕ={(μμ0−1)Hϕ=μ−μ0μ0I2πr,0<r<a0,r>a
La corriente de magnetización volumétrica se puede encontrar usando (16):
Jm=∇×M=−∂Mϕ∂zir+1r∂∂textrmr(rMϕ)iz=0,0<r<a
No hay corriente de magnetización masiva porque no hay corrientes libres a granel. Sin embargo, hay una corriente de magnetización de línea a r =0 y una corriente de magnetización superficial a r = a. Se encuentran fácilmente usando la forma integral de (16) del teorema de Stokes:
∫S∇×M⋅dS=∮LM⋅dl=∫SJm⋅dS
Escoja un cortour alrededor del centro del cilindro con r < a
Mϕ2πr=(μ−μ0μ0)I=Im
dondeIm está la corriente de la línea de magnetización. El resultado permanece sin cambios para cualquier radio r< a ya que no se encierra más corriente ya queJm=0 para 0 < r < a. Tan pronto como r > a,Mϕ se convierte en cero para que la corriente de magnetización total se convierta en cero. Por lo tanto, a r = a una corriente de magnetización superficial debe fluir cuya corriente total es igual en magnitud pero opuesta en signo a la corriente de magnetización de línea:
Kzm=−Im2πa=−μ−μ0)Iμ02πa