
3.2: Representación fasor de señales
- Page ID
- 82248

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Hay dos ideas clave detrás de la representación fasora de una señal:
- una señal real, variable en el tiempo, puede estar representada por una señal compleja, variable en el tiempo; y
- una señal compleja que varía en el tiempo puede representarse como el producto de un número complejo que es independiente del tiempo y una señal compleja que depende del tiempo.
Seamos concretos. La señal
\[x(t)=A\cos(ωt+φ) \nonumber \]
se ilustra en la Figura, una señal cosinusoidal con amplitud\(A\)\(ω\), frecuencia y fase\(φ\). La amplitud\(A\) caracteriza la oscilación pico a pico de\(2A\), la frecuencia angular\(ω\) caracteriza el período\(T=\frac {2π} ω\) entre los cruces por cero negativos a positivos (o picos positivos o picos negativos), y la fase\(φ\) caracteriza el tiempo en\(τ=\frac {−φ} ω\) que la señal alcanza su primer pico. Con\(τ\) esta definición, la señal también\(x(t)\) puede escribirse como
\[x(t)=A\cosω(t−τ) \nonumber \]
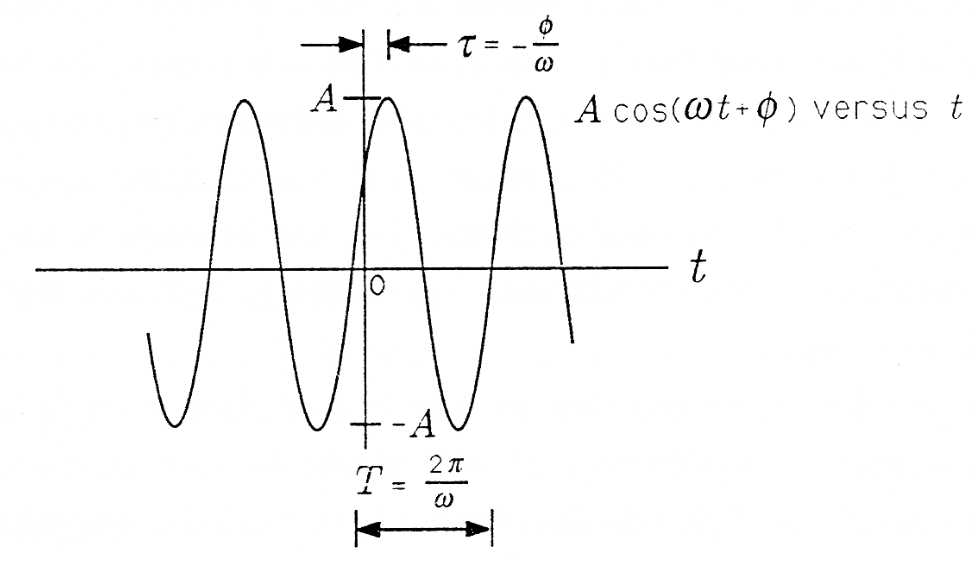
Cuando\(τ\) es positivo, entonces\(τ\) es un “retardo de tiempo” que describe el tiempo (mayor que cero) cuando se alcanza el primer pico. Cuando\(τ\) es negativo, entonces\(τ\) es un “avance de tiempo” que describe el tiempo (menor que cero) cuando se logró el último pico. Con la sustitución\(ω=\frac {2π} T\) obtenemos una tercera forma de escribir\(x(t)\):
\[x(t)=A\cos\frac {2π} {T} (t−τ) \nonumber \]
En esta forma la señal es fácil de trazar. Simplemente dibuje una onda cosinusoidal con amplitud A y periodo T; luego golpee el origen (t=0) para que la señal alcance su pico en\(τ\). En resumen, los parámetros que determinan una señal cosinusoidal tienen las siguientes unidades:
- A
- arbitrario (por ejemplo, voltios o metros/seg, dependiendo de la aplicación)
- ω
- en radianes/seg (rad/seg)
- T
- en segundos (seg)
- φ
- en radianes (rad)
- τ
- en segundos (seg)
Mostrar que\(x(t)=A\cos2πT(t−τ)\) es “periódico con periodo T”, lo que significa que\(x(t+mT)=x(t)\) para todos los enteros\(m\).
A la inversa del periodo T se le llama la “frecuencia temporal” de la señal cosinusoidal y se le da el símbolo\(f\); las unidades de\(f=\frac 1 T\) son (segundos) −1 o hercios (Hz). Escribir\(x(t)\) en términos de\(f\). ¿Cómo se\(f\) relaciona con\(ω\)? Explique por qué\(f\) da el número de ciclos de\(x(t)\) por segundo.
Esbozar la función\(x(t)=110\cos[2π(60)t−\frac π 8]\) versus\(t\). Repetir para\(x(t)=5\cos[2π(16×10^6)t+\frac π 4]\) y\(x(t)=2cos[\frac {2π} {10^{−3}}(t−\frac {10^{−3}} 8)]\). Para cada función, determinar\(A,ω,T,f,φ\), y\(τ\). Etiquete sus bocetos cuidadosamente.
La señal se\(x(t)=A\cos(ωt+φ)\) puede representar como la parte real de un número complejo:
\[x(t)=\mathrm{Re}[Ae^{j(ωt+φ)}]=\mathrm{Re}[Ae^{jφ}e^{jωt}] \nonumber \]
Llamamos a\(Ae^{jφ}e^{jωt}\) la representación compleja de\(x(t)\) y escribimos
\[x(t)↔Ae^{jφ}e^{jωt} \nonumber \]
lo que significa que la señal\(x(t)\) puede ser reconstruida tomando la parte real de\(Ae^{jφ}e^{jωt}\). En esta representación, llamamos\(Ae^{jφ}\) al fasor o representación de amplitud compleja de\(x(t)\) y escribimos
\[x(t)↔Ae^{jφ} \nonumber \]
lo que significa que la señal\(x(t)\) puede ser reconstruida\(Ae^{jφ}\) multiplicando con\(e^{jωt}\) y tomando la parte real. En teoría de la comunicación, llamamos a\(Ae^{jφ}\) la representación en banda base de la señal\(x(t)\).
Para cada una de las señales del Problema 3, dé la representación fasora correspondiente\(Ae^{jφ}\).
Interpretación Geométrica
Llamemos
\[Ae^{jφ}e^{jωt} \nonumber \]
la compleja representación de la señal real\(A\cos(ωt+φ)\). En\(t=0\), la representación compleja produce el fasor
\[Ae^{jφ} \nonumber \]
Este fasor se ilustra en la Figura. En la figura,\(φ\) es aproximadamente\(\frac {−π} {10}\) Si dejamos\(t\) aumentar al tiempo\(t_1\), entonces la representación compleja produce el fasor
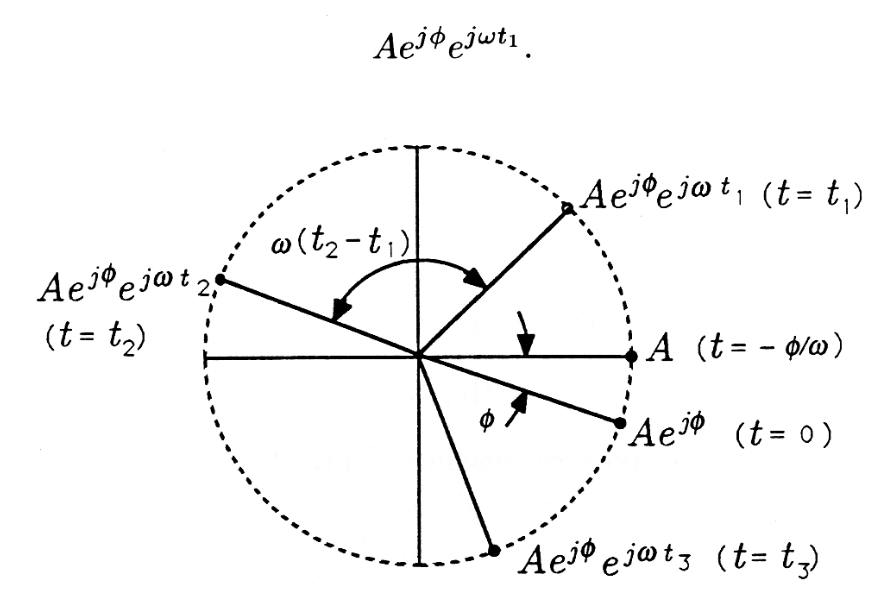
Sabemos por nuestro estudio de números complejos que\(e^{jωt_1}\) simplemente gira el fasor\(Ae^{jφ}\) a través de un ángulo de\(ωt_1\)! Ver Figura. Por lo tanto, a medida que corremos t desde 0, indefinidamente, giramos el fasor\(Ae^{jφ}\) indefinidamente, dando como resultado la trayectoria circular de la Figura. Cuando\(t=\frac {2π} ω\) entonces\(e^{jωt} = e^{j2π} = 1\). Por lo tanto, cada\((2πω)\) segundo, el fasor vuelve a visitar cualquier posición dada en el círculo de radio A. A veces llamamos a\(Ae^{jφ}e^{jωt}\) un fasor giratorio cuya velocidad de rotación es la frecuencia\(ω\):
\[\frac {d} {dt} ωt=ω \nonumber \]
Esta velocidad de rotación es también la frecuencia de la señal cosinusoidal\(A\cos(ωt+φ)\).
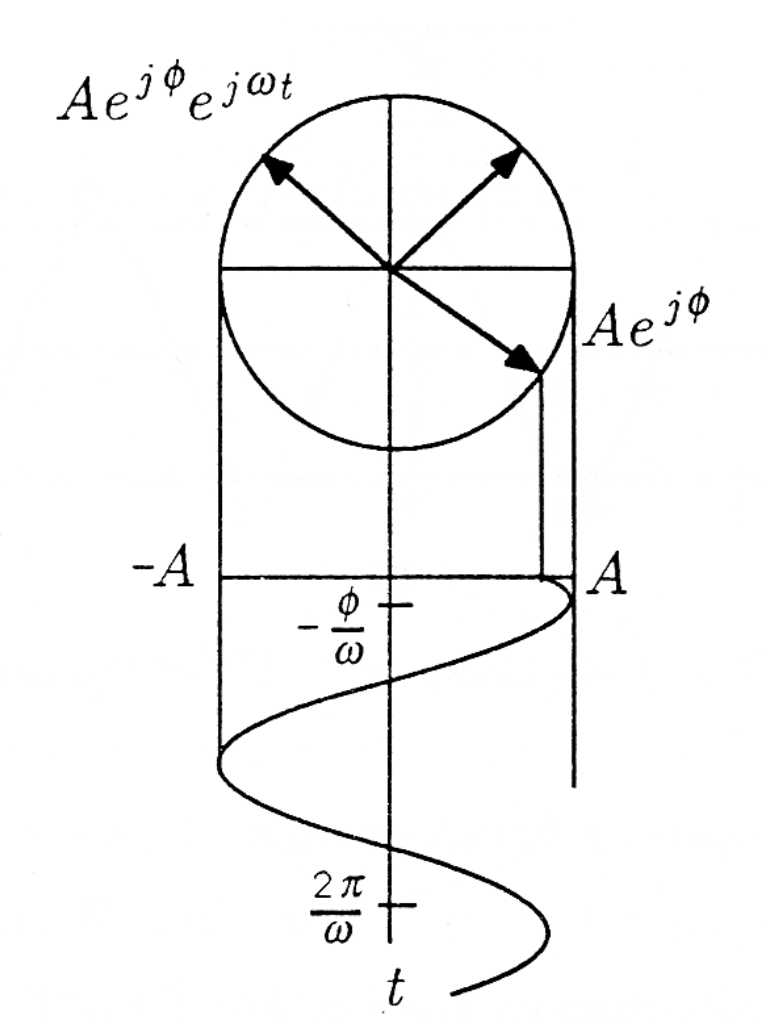
En resumen,\(Ae^{jφ}e^{jωt}\) es la representación compleja, o fasor giratoria, de la señal\(A\cos(ωt+φ)\). En esta representación,\(e^{jωt}\) gira el fasor\(Ae^{jφ}\) a través de ángulos\(ωt\) a la velocidad\(ω\). La parte real de la representación compleja es la señal deseada\(A\cos(ωt+φ)\). Esta parte real se lee del diagrama fasor giratorio como se ilustra en la Figura. En la figura, el ángulo\(φ\) es de aproximadamente\(\frac {−2π} {10}\). A medida que nos volvamos más fáciles con las representaciones fasoras, escribiremos\(x(t)=\mathrm{Re}[Xe^{jωt}]\) y llamaremos a\(Xe^{jωt}\) la representación compleja y a\(X\) la representación fasorial. El fasor\(X\) es, por supuesto, solo el fasor\(Ae^{jφ}\).
Esboza la parte imaginaria de\(Ae^{jφ}e^{jωt}\) para demostrar que esto es\(A\sin(ωt+φ)\). ¿Qué queremos decir cuando decimos que las partes reales e imaginarias de\(Ae^{jφ}e^{jωt}\) están “90 ° fuera de fase”?
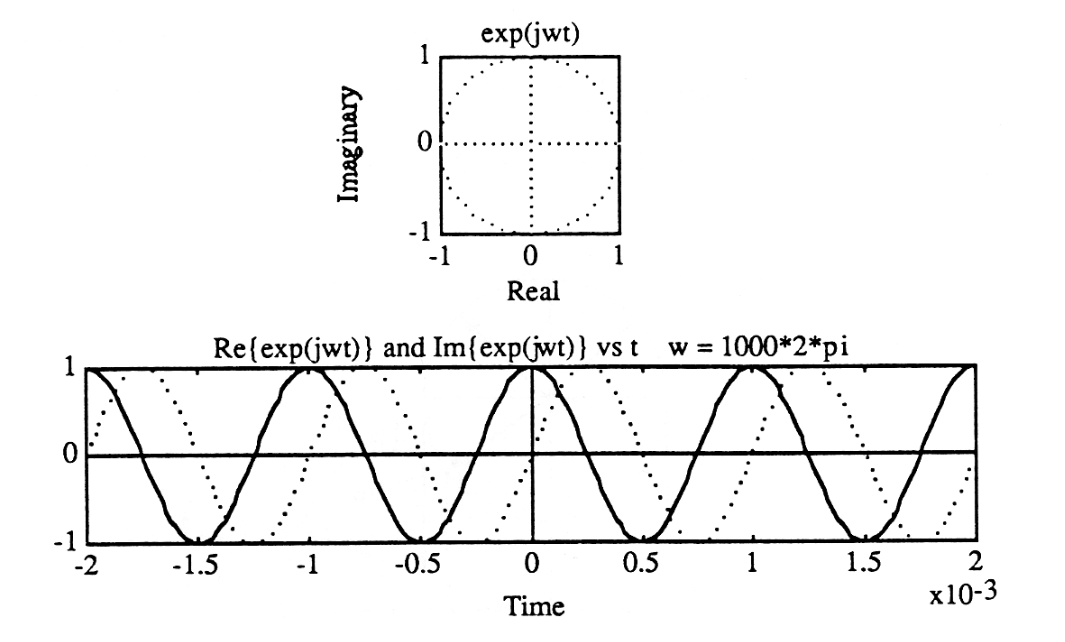
(MATLAB) Modifique Demo 2.1 en “La Función\(e^x\) y\(e^{jθ}\)" para que\(θ=ωt\), con\(ω\) una variable de frecuencia de entrada y\(t\) una variable de tiempo que va desde\(−2(\frac {2π} {ω})\) hasta+\(2(\frac {2π} ω)\) en pasos de\(0.02 (\frac {2π} ω)\). En su programa modificado, computar y trazar\(e^{jωt}\)\(\mathrm{Re{[e^{jωt}]}}\),, y\(\mathrm{Im}[e^{jωt}]\) para\(−2(\frac {2π} ω)≤t<2(\frac {2π} ω)\) en pasos de\(0.02 (\frac {2π} ω)\). Trazar\(e^{jωt}\) en una gráfica bidimensional para obtener una imagen como la Figura y trazar\(\mathrm{Re}[e^{jωt}]\) y\(\mathrm{Im}[e^{jωt}]\) versus\(t\) para obtener señales como las de la Figura. Debe observar algo como la Figura usando las características de la subtrama discutidas en Una introducción a MATLAB. (En la figura,\(w\) representa el griego\(ω\).)
Frecuencias Positivas y Negativas
Existe una representación fasora alternativa para la señal\(x(t)=A\cos(ωt+φ)\). Lo obtenemos usando la fórmula de Euler de “La Función e x e jθ “, es decir,\(\cos θ=\frac 1 2 (e^{jθ}+e^{−jθ})\). Cuando se aplica esta fórmula a\(x(t)\), obtenemos el resultado
\[x(t)=\frac A 2 [e^{j(ωt+φ)}+e^{−j(ωt+φ)}]=\frac A 2 e^{jφ}e^{jωt} + \frac A 2 e^{−jφ}e^{−jωt} \nonumber \]
En esta fórmula, el término\(\frac A 2 e^{jφ}e^{jωt}\) es un fasor giratorio que comienza en el valor del fasor\(\frac A 2 e^{jφ}\) (para t=0) y gira en sentido antihorario con frecuencia\(ω\). El término\(\frac A 2 e^{−jφ}e^{−jωt}\) es un fasor giratorio que comienza en el valor del fasor (conjugado complejo)\(\frac A 2 e^{−jφ}\) (para t=0) y gira en sentido horario con fequencia (negativa)\(ω\). La frecuencia físicamente significativa para un coseno es\(ω\), un número positivo como\(2π(60)\) para la potencia de 60 Hz. No existe tal cosa como una frecuencia negativa. La llamada frecuencia negativa del término\(\frac A 2 e^{−jφ}e^{−jωt}\) solo indica que la dirección de rotación para el fasor giratorio es en sentido horario y no en sentido contrario a las agujas del reloj. La noción de frecuencia negativa es solo un artefacto de la representación bifásica de\(Acos(ωt+φ)\). En la representación unifásica, cuando tomamos la “parte real”, el artefacto no surge. En su estudio de circuitos, teoría de sistemas, electromagnetismo, dispositivos de estado sólido, procesamiento de señales, control y comunicaciones, encontrará representaciones tanto de uno como de dos fases. Hazte fácil con ellos.
Esbozar la representación bifásica de\(A\cos(ωt+φ)\). Mostrar claramente cómo funciona esta representación discutiendo la rotación en sentido contrario a las agujas del reloj de la parte de frecuencia positiva y la rotación en sentido horario de la parte de frecuencia negativa.
Adición de fasores
La suma de dos señales con frecuencias comunes pero diferentes amplitudes y fases es
\[A_1\cos(ωt+φ_1)+A_2\cos(ωt+φ_2) \nonumber \]
La representación de fasores rotativos para esta suma es
\[(A_1e^{jφ_1}+A_2e^{jφ_2})e^{jωt} \nonumber \]
El nuevo fasor es\(A_1e^{jφ_1}+A_2e^{jφ_2}\), y la señal real correspondiente es\(x(t)=Re[(A_1e^{jφ_1}+A_2e^{jφ_2})e^{jωt}]\). El nuevo fasor se ilustra en la Figura.
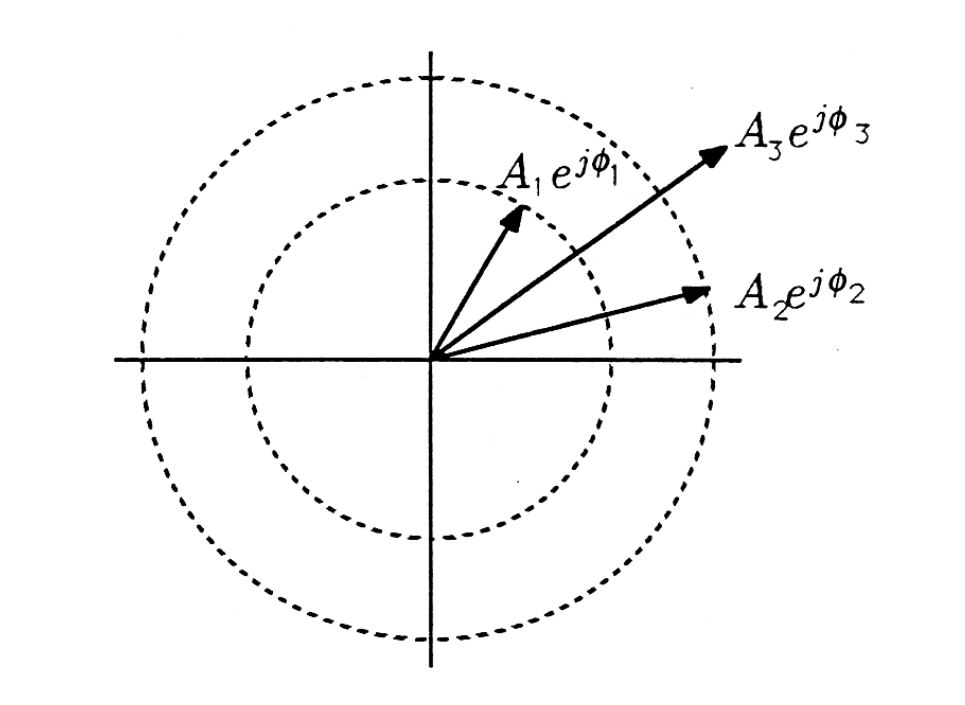
Escribir el fasor\(A_1e^{jφ_1}+A_2e^{jφ_2}\) como\(A_3e^{jφ_3}\); determinar\(A_3\) y\(φ_3\) en términos de\(A_1,A_2,φ_1,\) y\(φ_2\). ¿Cuál es la señal real correspondiente?
Diferenciar e Integrar Fasores
La derivada de la señal\(A\cos(ωt+φ)\) es la señal
\[\frac d {dt} A\cos(ωt+φ) = −ωA\sin(ωt+φ) \nonumber \]
\[=−\mathrm{Im}[ωAe^{jφ}e^{jωt}]=\mathrm{Re}[jωAe^{jφ}e^{jωt}] \nonumber \]
\[=\mathrm{Re}[ωe^{jπ/2}Ae^{jφ}e^{jωt}] \nonumber \]
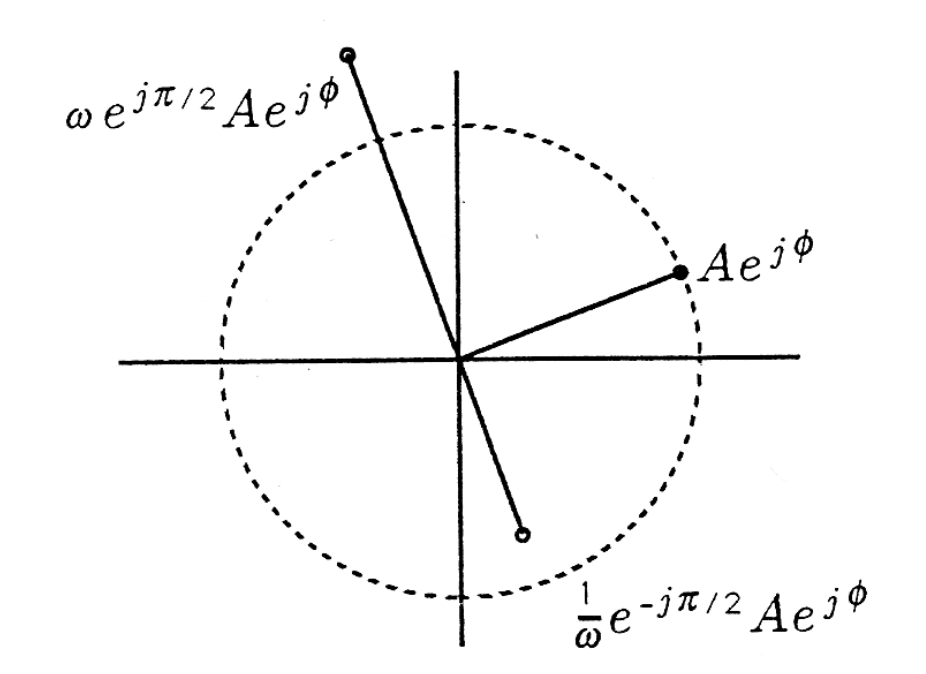
Este hallazgo es muy importante. Dice que la derivada de\(A\cos(ωt+φ)\) tiene la representación fasora
\[\frac d {dt} A\cos(ωt+φ) ↔ jωAe^{jφ}↔ωe^{jπ/2}Ae^{jφ} \nonumber \]
Estas dos representaciones fasoriales son totalmente equivalentes. El primero dice que el fasor\(Ae^{jφ}\) es complejo escalado por\(jω\) para producir el fasor para\(\frac d {dt} A\cos(ωt+φ)\), y el segundo dice que es escalado por\(ω\) y escalado por\(+π/2\). Las representaciones fasoras de\(A\cos(ωt+φ)\) y\(\frac d {dt} A\cos(ωt+φ)\) se ilustran en la Figura 3.6. Tenga en cuenta que la derivada “lidera por\(π/2\) radianes (90)”.
La integral de\(A\cos(ωt+φ)\) es
\[∫A\cos(ωt+φ)dt=\frac A ω \sin(ωt+φ)=\mathrm{Im}[\frac A ω e^{jφ}e^{jωt}] \nonumber \]
\[=\mathrm{Re}[−j\frac A ω e^{jφ}e^{jωt}] = \mathrm{Re}[\frac A {jω} e^{jφ}e^{jωt}] = \mathrm{Re}[\frac 1 ω e^{−jπ/2}Ae^{jφ}e^{jωt}] \nonumber \]
Este hallazgo muestra que la integral de\(A\cos(ωt+φ)\) tiene la representación fasora
\[∫A\cos(ωt+φ)dt↔\frac 1 {jω} Ae^{jφ}↔\frac 1 ω e^{−jπ/2} Ae^{jφ} \nonumber \]
El fasor\(Ae^{jφ}\) es complejo escalado por\(\frac 1 {jω}\) o escalado por\(\frac 1 ω\) y escalado por\(e^{−jπ/2}\) para producir el fasor para\(∫A\cos(ωt+φ)dt\). Esto se ilustra en la Figura. Tenga en cuenta que la integral “rezagos por\(π/2\) radianes (90". Mantenga estas imágenes geométricas de liderar y rezagarse\(π/2\) en su mente en todo momento mientras continúa con su estudio más avanzado de ingeniería.
Un aparte: El oscilador armónico
La señal\(A\cos(ωt+φ)\) se destaca por sí sola como una señal interesante. Pero el hecho de que se reproduce (con escalado y fase) bajo diferenciación significa que obedece a la ecuación diferencial de segundo orden del oscilador armónico simple. 1 Es decir, la ecuación diferencial
\[\frac {d^2x(t)} {dt^2} + ω^2x(t)=0 \nonumber \]
tiene la solución
\[x(t)=A\cos(ωt+φ) \nonumber \]
Pruébalo:
\[\frac {d^2} {dt^2} x(t)=\frac d {dt}[−Aω\sin(ωt+φ)]=−ω2A\cos(ωt+φ) \nonumber \]
Las constantes\(A\) y\(φ\) se determinan a partir de las condiciones iniciales
\[x(0)=A\cosφ ⇔ x^2(0)+x^2(\frac π {2ω})=A^2 \nonumber \]
\[x(\frac π {2ω})=−A\sinφ ⇔ −\frac {x(π/2ω)} {x(0)} = \tanφ \nonumber \]
Mostrar cómo calcular\(A\) y\(φ\) en la ecuación\(x(t)=A\cos(ωt+φ)\) a partir de las condiciones iniciales\(x(O)\) y\(\frac d {dt} x(t)|_{t=0}\).
Notas al pie
1. Esto significa, también, que tenemos una manera fácil de sintetizar cosenos con circuitos que obedecen a la ecuación de un simple oscilador armónico!