
6.1: Problemas
- Page ID
- 109991
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- a) Establecer todos los grupos abstractos que tengan un orden\(2 \le N \le 6\). Compute productos típicos. ¿Qué grupos son abelianos? Indicar al menos dos realizaciones isomórficas para cada grupo.
b) Identificar los subgrupos. ¿Cuáles son invariantes?
- Anote las permutaciones de\(n = 3\) y\(n = 4\) los objetos. Organiza el resultado de manera compacta. Considerar al principio el subgrupo de permutaciones pares (el grupo alterno). Hacer uso de ciclos.
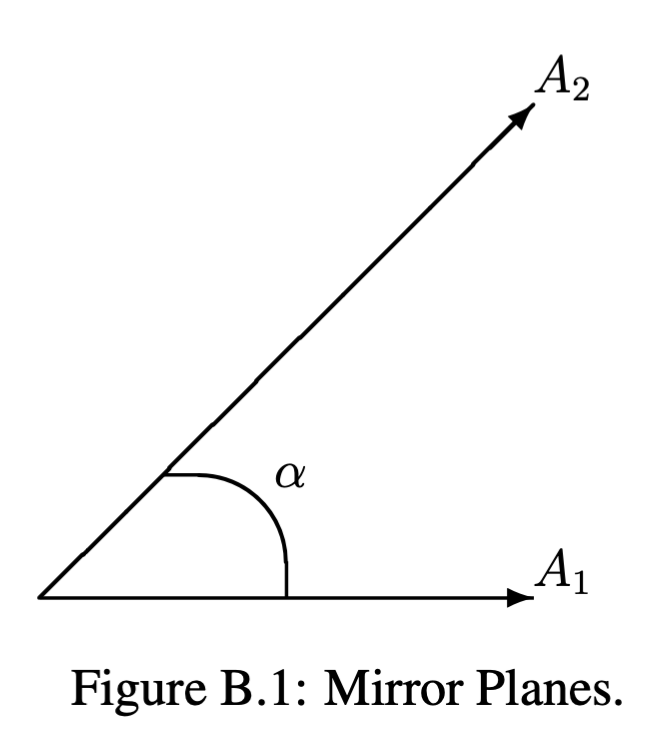
- Encuentra el efecto conjunto de dos planos de espejo (ver Figura B.1). Considera también espejos paralelos.
- Un pulso de onda esférica diverge del punto espacio-tiempo (0, 0, 0, 0) en el marco inercial\(\sum\). Considera un marco que\(\sum'\) se mueve a lo largo de la dirección z con la velocidad\(\beta = \tanh \mu\). El observador en\(\sum'\) ve también frentes de onda esférica. Sin embargo, los puntos de espacio-tiempo que componen una superficie\(r' = ct' = const\) no parecen sincrónicos, de ahí esféricos en\(\sum\). Mostrar que las superficies son elipsoides de revolución con un foco común. Encontrar los ejes mayor y menor a, b, y la excentricidad en términos de\(r'\) y\(\beta\). Encuentra también las longitudes del perihelio y del afelio. Usa coordenadas polares.
- Considerar la composición de las rotaciones en el\(\mathcal{SU}(2)\) formalismo:\(U'' =U'U\) dónde\(U = l_{0} = -i \vec{l} \cdot \vec{\sigma}\), con
\[\begin{array}{cc} {l_{0} = \cos \frac{\phi}{2},}&{\vec{l} = \sin \frac{\phi}{2} \hat{u}} \nonumber \end{array}\]
(a) Expresar\(\{l_{0}'', \vec{l}''\}\) en términos de\(\{l_{0}', \vec{l}'\}\) y\(\{l_{0}, \vec{l}\}\).
(b) Hacer referencia al teorema de Rodriues-Hamilton (Figura 2.1) y obtener la ley coseno de la trigonometría esferica.
c) Obtener la ley sine.
6. Consulta tus expresiones generales aplicando los casos especiales:
(a)\(U'' = UU = U^{2}\)
b)\(\hat{u} = \frac{1}{\sqrt{3}} (1, 1, 1),}&{\phi = \frac{2 \pi}{3}\)
\(\hat{u} = \frac{1}{\sqrt{3}} (1, 0, 0),}&{\phi = \frac{\pi}{2}\)
Tenga en cuenta que U y U' generan operaciones de simetría en el cubo.
7. Considerar el movimiento unidimensional de una partícula de masa de reposo m, bajo la influencia de una fuerza\(eE_{z}\). En\(t = 0\) la partícula está en reposo. Demostrar que la trayectoria se representa en el plano z, ct como una hipérbola y encontrar el semidiámetro. Desarrolla la analogía con el problema del ciclotrón en la medida de lo posible. Discutir la significación de la aproximación
\[\begin{array}{c} {\gamma^{-1} = \sqrt{1-\beta^2} \simeq 1} \nonumber \end{array}\]
8. Considerar un campo electromagnético
\[\begin{array}{c} {\vec{f} = \vec{E}+i \vec{B}} \nonumber \end{array}\]
en una pequeña región espacio-temporal. El Lorentz invariante del campo es:
\[\begin{array}{c} {f^{2} = E^{2}-B^{2}+2i E \cdot B = I_{1}+i I_{2} = g^{2} \exp(2i \psi)} \nonumber \end{array}\]
a) Considerar el caso\(f^{2} \ne 0\). En este caso, existe un marco canónico en el que\(E_{can} \parallel B_{can}\) y\(\zeta = B_{can}/E_{can}\), el tono, es un número real (que podría ser 0 o\(\infty\)). Discutir los posibles valores de\(\zeta\) acuerdo a los signos de\(I_{1}\) y\(I_{2}\). Resume tus conclusiones en una tabla como la que se muestra en la Tabla B.1.
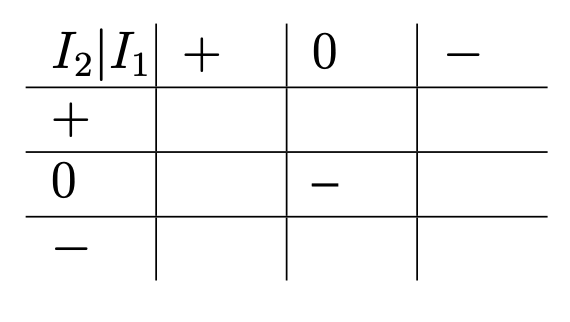
Cuadro B.1: Cuadro para el Problema 8
(b) Expresar\(E_{can}, B_{can}, \zeta\) en términos de\(I_{1}, I_{2}\) y\(g, \psi\).
(c) Asumir\(\zeta \ne 0, \infty\). Llevar a\(\hat{x}\) lo largo\(E_{can}\). Considerar una transformación pasiva de Lorentz en la\(\hat{z}\) dirección, a un marco de velocidad\(v(\beta = v/c = \tanh \mu)\) con respecto al marco canónico. Encontrar\(\tan \theta E, \tan \theta B, \tan(\theta_{E}-\theta_{B})\) en términos de\(\beta, \zeta\) y también\(\mu, \psi\), dónde\(\theta_{E}\) y\(\theta_{B}\) son los ángulos por los que giran los campos eléctrico y magnético bajo la transformación de Lorentz, como se muestra en la Figura B.2.
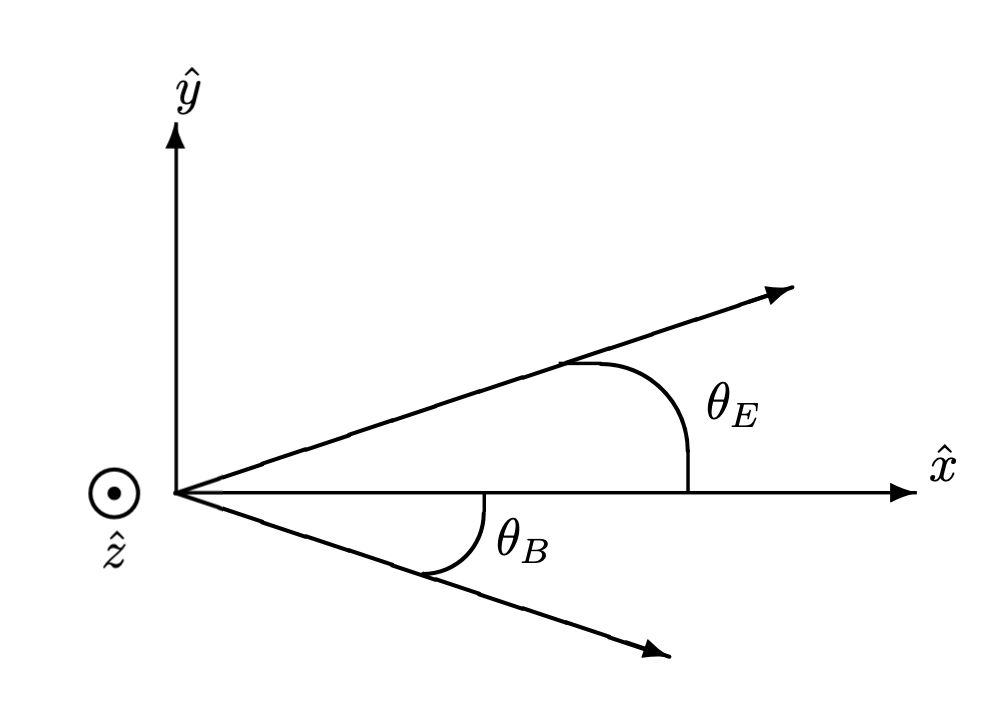
Figura B.2: Problema 8 marco de coordenadas y ángulos.
d) Considerar ahora los casos\(\zeta = 0; \zeta = \infty\). Tomar\(\hat{x}\) en dirección al campo canónico que no se desvanece. Discutir el efecto de una transformación de Lorentz similar a la considerada en (c). Dar la relación de las magnitudes de los campos eléctrico y magnético después de la transformación de Lorentz.
9. (a) Encontrar la descomposición polar de la matriz
\[\begin{array}{c} {\begin{pmatrix} {1}&{\zeta}\\ {0}&{1} \end{pmatrix}} \nonumber \end{array}\]
Verificar la relación (11b) en la p. II-53. Considerar los casos\(\delta = 1\) y\(\delta << 1\).
b) Encontrar
\[\begin{array}{c} {\mathcal{P}_{\hat{a}} (\vec{p} \cdot \vec{\sigma}) \mathcal{P}_{\hat{a}}} \nonumber \end{array}\]
donde
\[\begin{array}{c} {\mathcal{P}_{\hat{a}} = \frac{1}{2} (1+\hat{a} \cdot \vec{\sigma})} \nonumber \end{array}\]
10. Verificar Eq. (23) - (26) en II-42, 43.
11. Mostrar que la matriz de campo se\(F = (\vec{E}+i \vec{B}) \cdot \vec{\sigma}\) puede derivar de la matriz equivalente de los cuatro potenciales. ¿Qué condiciones, en su caso, se van a imponer a estos últimos?
12. a) Expresar el reflejo de un cuatro vectores\(K = k_{0}1+\vec{k} \cdot \vec{\sigma}\) en un plano móvil. Lo normal del avión es\(\hat{a}\). Su velocidad es\(v = v \hat{a}\) con\(v/c = \tanh \mu\). (Hint:Transformar al resto del marco del espejo.)
(b) Demostrar que la combinación de dos espejos\(\vec{v}_{1} = v_{1} \hat{a}_{1}\), y\(\vec{v}_{2} = v_{2} \hat{a}_{2}\) produce una transformación Lorentz.
13. Verificar la equivalencia de las Ecuaciones (4) y (5) en la Sección 4.2 transformando cada factor del espacio al fotograma.
14. Demostrar que la relación
\[\begin{array}{c} {|\xi \rangle \langle \xi |= \frac{1}{2} (1+\hat{k} \cdot \vec{\sigma})} \end{array}\]
se puede obtener a través de proyección estereográfica.
Sugerencia: Proyectar la esfera\(k_{1}^{2}+k_{2}^{2}+k_{3}^{2} = 1\) desde el polo sur hasta el plano ecuatorial interpretado como el plano z complejo. Expresar\(k_{1}, k_{2}, k_{3}\) en términos de\(z, z∗\) y establecer\(z = \xi_{1}/\xi_{0}\) con\(|\xi_{0}|^{2}+|\xi_{1}|^{2} = 1\).
15. Encuentra la matriz unitaria U que conecta dos conjuntos dados de espinores entre sí:
\[\begin{array}{c} {(| \eta \rangle, | \bar{\eta} \rangle) = (| \xi \rangle, | \bar{\xi} \rangle)U} \end{array}\]
Expresar primero sus elementos, luego sus componentes en términos de\(\xi_{0}, \xi_{1}, \eta_{0}, \eta_{1}\).
16. El álgebra de Pauli puede considerarse como una generalización del álgebra vectorial elemental y el conocimiento de este último es útil en la manipulación de matrices.
Sin embargo, se puede abordar el problema también desde el punto de vista inverso y derivar las relaciones vectoriales a través de operaciones matriciales. Definir
\[\begin{array}{ccc} {A= \vec{a} \cdot \vec{\sigma},}&{B = \vec{b} \cdot \vec{\sigma},}&{C = \vec{c} \cdot \vec{\sigma}} \nonumber \end{array}\]
y asociado
\[\begin{array}{ccc} {\vec{a} \cdot \vec{b}}&{with}&{\frac{1}{2} \{A, B\} = \frac{1}{2} (AB+BA)} \end{array}\]
\[\begin{array}{ccc} {\vec{a} \times \vec{b}}&{with}&{\frac{1}{2i} \{A, B\} = \frac{1}{2i} (AB-BA)} \end{array}\]
Considerar la identidad jacobi
\[\begin{array}{c} {[[A, B], C] + [[B, C], A] + [[C, A], B] = 0} \end{array}\]
y la condición para la asociatividad:
\[\begin{array}{c} {A (BC)-(AB) C = 0} \end{array}\]
(La ecuación B.1.5 se verifica fácilmente para los conmutadores. Por su significación véase [Hal74].)
Traducir las Ecuaciones B.1.5 y B.1.6 por medio de las Ecuaciones B.1.3 y B.1.4, y obtener las relaciones familiares para productos de triple vector.
17. Dar expresiones espinoriales explícitas para las siguientes formas de polarización:\(| x \rangle\) (polarización lineal a lo largo del eje x);\(| \theta/2 \rangle\) (polarizada en el ángulo\(\theta /2\) con el eje x);\(| R \rangle\) (polarizada circularmente derecha).
a) Utilizar el\(\hat{\kappa} (\phi, \theta, \psi)\) esquema y asignarlo\(\phi = \psi = \theta = 0\) a\(| x \rangle = (1, 0)\). Expresar\(| \theta/2 \rangle, | \theta/2 \rangle, | R \rangle, | \bar{R} \rangle\) en términos de\(| x \rangle\) y\(| \bar{x} \rangle\).
b) Utilizar el\(\hat{s}(\alpha, \beta, \gamma)\) esquema. Asignar\(\beta = 0, \alpha = \gamma = \pi / 2\) a\(| R \rangle\). Expresar las espinoras antes mencionadas en términos de\(| R \rangle\) y\(| \bar{R} \rangle\). Obsérvese que los resultados de (a) y (b) son consistentes entre sí.
18. Dar las representaciones matriciales de un cuarto de onda, una placa, una placa de media onda, un rotador y un polarizador plano tanto en el\(\hat{k}\) esquema como en el\(\hat{s}\) esquema.
19. (a) Sabemos de un instrumento óptico sólo en el que\(| R \rangle\) se transforma\(| \bar{R} \rangle\) y viceversa. Encuentre el operador de matriz más general consistente con este hecho
(b) Afilar esta respuesta utilizando la información adicional de que el instrumento pasa un haz\(| x \rangle\) sin cambios. ¿Cuál es el nombre de este dispositivo?
20. Consideremos una\(2 \times 2\) matriz hermitiana arbitraria:\(S = s_{0}+\vec{s} \cdot \vec{\sigma}\) con\(s_{0}^{2}-\vec{s}^{2} \ne 0\) en general.
(a) Demostrar que es posible descomponer S en una suma de dos matrices con cero determinante. Es decir:
\[\begin{array}{c} {S = K'+K''} \nonumber \end{array}\]
donde
\[\begin{array}{cc} {K' = k'_{0}+\vec{k}' \cdot \vec{\sigma}}&{k_{0}^{'2}-\vec{k}'^{2}} \nonumber \end{array}\]
\[\begin{array}{cc} {K'' = k''_{0}+\vec{k}'' \cdot \vec{\sigma}}&{k_{0}^{''2}-\vec{k}''^{2}} \nonumber \end{array}\]
b) Demostrar que si se impone:
\[\begin{array}{c} {\vec{k}' = k' \hat{k}}\\ {\vec{k}'' = k'' \hat{k}}\\ {\vec{k}' and \vec{k}'' parallel} \nonumber \end{array}\]
la descomposición se vuelve única. Encuentra\(k_{0}', k_{0}'', k', k'', hat{k}\).
21. Considerar un haz aproximadamente monocromático de luz no polarizada, se ha sugerido que dicho haz sea considerado como una secuencia aleatoria de luz elípticamente polarizada, por lo que los parámetros de elipticidad\(\alpha, \beta\) varían lentamente en comparación con\(1/\omega\) pero rápidos en comparación con el tiempo de observación (ver [Hur 45]). Este autor muestra que la elipticidad promedio viene dada por el valor de la mediana
\[\begin{array}{c} {(\frac{a_{2}}{a_{1}})_{m} = \tan(15^{\circ})} \nonumber \end{array}\]
Este resultado se puede obtener de manera muy sencilla. Supongamos que todos los puntos representativos de la esfera Poincaré son igualmente probables. Considera la cantidad:
\[\begin{array}{c} {S = \frac{2a_{1}a_{2}}{a_{1}^{2}+a_{2}^{2}}} \nonumber \end{array}\]
por un punto arbitrario sobre la esfera.
Tomar el promedio de\(|S|\) sobre la esfera de Poincaré, utilizando el supuesto estadístico anterior.
Deducir el valor
\[\begin{array}{c} {(\frac{a_{2}}{a_{1}})_{0}} \nonumber \end{array}\]
correspondiente a\(\langle |S| \rangle\).