
10.3: El Producto Dot
- Page ID
- 111841

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)En la sección anterior se introdujeron vectores y se describía cómo sumarlos y cómo multiplicarlos por escalares. Esta sección introduce una multiplicación en vectores llamada el producto punto.
Definición 57 Dot Producto
- Dejar\(\vec u = \langle u_1,u_2\rangle \) y\(\vec v = \langle v_1,v_2\rangle \) entrar\(\mathbb{R}^2\). El producto punteado de\(\vec u\) y\(\vec v\), denotado\(\vec u \cdot \vec v\), es
\[\vec u \cdot \vec v = u_1v_1+u_2v_2.\] - Dejar\(\vec u = \langle u_1,u_2,u_3\rangle \) y\(\vec v = \langle v_1,v_2,v_3\rangle \) entrar\(\mathbb{R}^3\). El producto punteado de\(\vec u\) y\(\vec v\), denotado\(\vec u \cdot \vec v\), es
\[\vec u \cdot \vec v = u_1v_1+u_2v_2+u_3v_3.\]
Observe cómo este producto de vectores devuelve un escalar, no otro vector. Practicamos evaluar un producto punto en el siguiente ejemplo, luego discutiremos por qué este producto es útil.
Ejemplo\(\PageIndex{1}\): Evaluating dot products
- Dejar\(\vec u=\langle 1,2\rangle \),\(\vec v=\langle 3,-1\rangle \) entrar\(\mathbb{R}^2\). Encuentra\(\vec u \cdot \vec v\).
- Dejar\(\vec x = \langle 2,-2,5\rangle \) y\(\vec y = \langle -1, 0, 3\rangle \) entrar\(\mathbb{R}^3\). Encuentra\(\vec x \cdot \vec y\).
Solución
- Usando la Definición 57, tenemos\[\vec u \cdot \vec v = 1(3)+2(-1) = 1.\]
- Usando la definición, tenemos
\[\vec x \cdot \vec y = 2(-1) -2(0) + 5(3) = 13.\]
El producto punto, como lo muestra el ejemplo anterior, es muy sencillo de evaluar. Es sólo la suma de productos. Si bien la definición no da indicios de por qué nos importaría esta operación, existe una conexión increíble entre el producto de punto y los ángulos formados por los vectores. Antes de afirmar esta conexión, damos un teorema que indica algunas de las propiedades del producto punto.
TEORAMA 85 PROPIEDADES DEL PRODUCTO DOT
Dejar\(\vec u\),\(\vec v\) y\(\vec w\) ser vectores en\(\mathbb{R}^2\) o\(\mathbb{R}^3\) y dejar\(c\) ser un escalar.
- \(\vec u \cdot \vec v = \vec v \cdot \vec u\)Propiedad conmutativa
- \(\vec u\cdot(\vec v+\vec w) =\vec u \cdot \vec v + \vec u \cdot \vec w\)Propiedad distributiva
- \(c(\vec u \cdot \vec v) = (c\vec u)\cdot \vec v = \vec u \cdot (c\vec v)\)
- \(\vec 0 \cdot \vec v = 0\)
- \(\vec v \cdot \vec v= \norm{\vec v}^2 \)
La última afirmación del teorema hace una conexión práctica entre la magnitud de un vector y el producto punto consigo mismo.
Nuestra definición y teorema dan propiedades del producto punto, pero es probable que todavía nos preguntemos “¿Qué significa el producto dot?” Es útil entender que el producto punto de un vector consigo mismo está conectado a su magnitud.
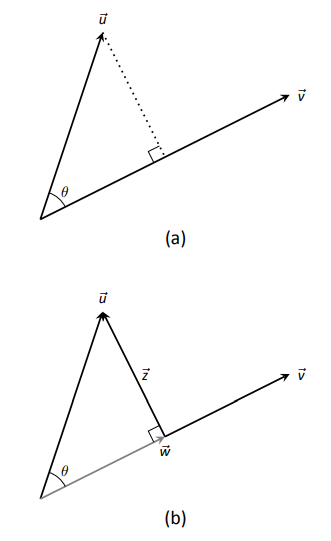
El siguiente teorema extiende esta comprensión conectando el producto punto a magnitudes y ángulos. Dados vectores\(\vec u\) y\(\vec v\) en el plano,\(\theta\) se forma claramente un ángulo cuando\(\vec u\) y\(\vec v\) se dibujan con el mismo punto inicial que se ilustra en la Figura 10.29 (a). (Siempre tomamos\(\theta\) como el ángulo adentro\([0,\pi]\) ya que en realidad se crean dos ángulos).
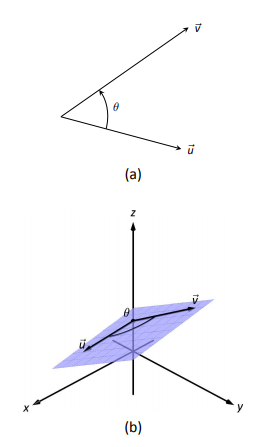
Lo mismo es cierto también de 2 vectores en el espacio: dado\(\vec u\) y\(\vec v\) en\(\mathbb{R}^3\) con el mismo punto inicial, hay un plano que contiene ambos\(\vec u\) y\(\vec v\). (Cuando\(\vec u\) y\(\vec v\) son colineales, hay planos infinitos que contienen ambos vectores.) En ese plano, podemos encontrar de nuevo un ángulo\(\theta\) entre ellos (y otra vez,\(0\leq \theta\leq \pi\)). Esto se ilustra en la Figura 10.29 (b).
El siguiente teorema conecta este ángulo\(\theta\) con el producto puntual de\(\vec u\) y\(\vec v\).
teorema 86 el producto punto y ángulos
Dejar\(\vec u\) y\(\vec v\) ser vectores en\(\mathbb{R}^2\) o\(\mathbb{R}^3\). Entonces
\[\vec u \cdot \vec v = \norm{\vec u}\,\norm{\vec v} \cos\theta,\]
donde\(\theta\),\(0\leq\theta\leq \pi\), es el ángulo entre\(\vec u\) y\(\vec v\).
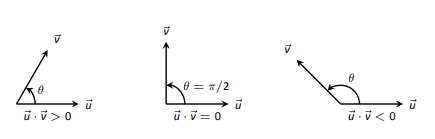
Cuando\(\theta\) es un ángulo agudo (i.e.,\(0\leq \theta <\pi/2\)),\(\cos \theta\) es positivo; cuándo\(\theta = \pi/2\),\(\cos \theta = 0\); cuándo\(\theta\) es un ángulo obtuso (\(\pi/2<\theta \leq \pi\)),\(\cos \theta\) es negativo. Así, el signo del producto punteado da una indicación general del ángulo entre los vectores, ilustrado en la Figura 10.30.
Podemos usar el Teorema 86 para calcular el producto de punto, pero generalmente este teorema se usa para encontrar el ángulo entre vectores conocidos (ya que el producto punto generalmente es fácil de calcular). Para ello, reescribimos la ecuación del teorema como
\[\cos \theta = \frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}} \quad \Leftrightarrow \quad \theta = \cos^{-1}\left(\frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}}\right).\]
Practicamos el uso de este teorema en el siguiente ejemplo.
Ejemplo\(\PageIndex{2}\): Using the dot product to find angles
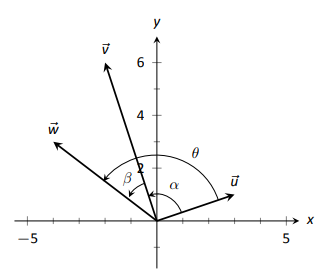
Dejar\(\vec u = \langle 3,1\rangle \),\(\vec v = \langle -2,6\rangle \) y\(\vec w = \langle -4,3\rangle \), como se muestra en la Figura 10.31. Encuentra los ángulos\(\alpha\),\(\beta\) y\(\theta\).
Solución
Comenzamos por computar la magnitud de cada vector.
\[\norm{\vec u} = \sqrt{10};\quad \norm{\vec v} = 2\sqrt{10};\quad \norm{\vec w} = 5.\]
Ahora aplicamos el Teorema 86 para encontrar los ángulos.
\ [\ begin {align*}
\ alpha &=\ cos^ {-1}\ izquierda (\ frac {\ vec u\ cdot\ vec v} {(\ sqrt {10}) (2\ sqrt {10})}\ derecha)\\
&=\ cos^ {-1} (0) =\ frac {\ pi} 2 = 90^\ circ. \\
\ beta &=\ cos^ {-1}\ izquierda (\ frac {\ vec v\ cdot\ vec w} {(2\ sqrt {10}) (5)}\ derecha)\\
&=\ cos^ {-1}\ izquierda (\ frac {26} {10}}\ sqrt {10}}\ derecha)\\
&\ aproximadamente 0.6055\ circ aproximadamente 34.7^\ c. \
\ theta &=\ cos^ {-1}\ izquierda (\ frac {\ vec u\ cdot\ vec w} {(\ sqrt {10}) (5)}\ derecha)\\
&=\ cos^ {-1}\ izquierda (\ frac {-9} {5\ sqrt {10}}\ derecha)\\
&\ aproximadamente 2.1763\ aproximadamente 124.7^\ circ
\ final {alinear*}\]
Vemos de nuestro cómputo que\(\alpha + \beta = \theta\), como indica la Figura 10.31. Si bien sabíamos que este debería ser el caso, es agradable ver que esta fórmula no intuitiva de hecho devuelve los resultados que esperábamos.
Hacemos un ejemplo similar a continuación en el contexto de vectores en el espacio.
Ejemplo\(\PageIndex{3}\): Using the dot product to find angles
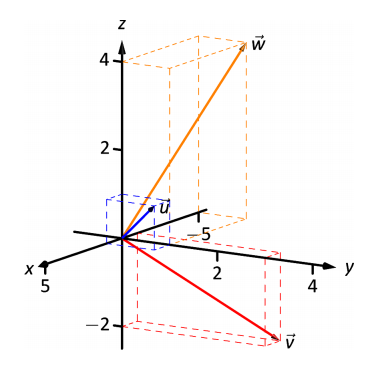
Let\(\vec u = \langle 1,1,1\rangle \),\(\vec v = \langle -1,3,-2\rangle \) y\(\vec w = \langle -5,1,4\rangle \), como se ilustra en la Figura 10.32. Encuentra el ángulo entre cada par de vectores.
Solución
- Entre\(\vec u\) y\(\vec v\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{3}\sqrt{14}}\right)\\&= \frac{\pi}2.\end{align*}\]
- Entre\(\vec u\) y\(\vec w\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec u \cdot \vec w}{\norm{\vec u}\norm{\vec w}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{3}\sqrt{42}}\right)\\&= \frac{\pi}2.\end{align*}\] - Entre\(\vec v\) y\(\vec w\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec v \cdot \vec w}{\norm{\vec v}\norm{\vec w}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{14}\sqrt{42}}\right)\\&= \frac{\pi}2.\end{align*}\]
Si bien nuestro trabajo muestra que cada ángulo es\(\pi/2\), es decir\(90^\circ\), ninguno de estos ángulos parece ser un ángulo recto en la Figura 10.32. Tal es el caso cuando se dibujan objetos tridimensionales en la página.
Los tres ángulos entre estos vectores fue\(\pi/2\), o\(90^\circ\). Sabemos por la geometría y la vida cotidiana que los\(90^\circ\) ángulos son “agradables” por diversas razones, por lo que debería parecer significativo que estos ángulos sean todos\(\pi/2\). Observe la característica común en cada cálculo (y también el cálculo de\(\alpha\) en el Ejemplo 10.3.2): los productos punteados de cada par de ángulos fue 0. Utilizamos esto como base para una definición del término ortogonal, que es esencialmente sinónimo de perpendicular.
Definición 58 ORTOGONAL
Vectores\(\vec u\) y\(\vec v\) son ortogonales si su producto punto es 0.
Nota: El término perpendicular originalmente se refería a líneas. A medida que avanzaban las matemáticas, el concepto de “estar en ángulo recto” se aplicó a otros objetos, como vectores y planos, y se introdujo el término ortogonal. Se utiliza especialmente cuando se discuten objetos que son difíciles, o imposibles, de visualizar: dos vectores en el espacio 5-dimensional son ortogonales si su producto punto es 0. No está mal decir que son perpendiculares, pero la convención común da preferencia a la palabra ortogonal.
Ejemplo\(\PageIndex{4}\): Finding orthogonal vectors
Dejar\(\vec u = \langle 3,5\rangle \) y\(\vec v = \langle 1,2,3\rangle \).
- Encuentra dos vectores en los\(\mathbb{R}^2\) que son ortogonales a\(\vec u\).
- Encuentra dos vectores no paralelos en los\(\mathbb{R}^3\) que son ortogonales a\(\vec v\).
Solución
- Recordemos que una línea perpendicular a una línea con pendiente\(m\) tiene pendiente\(-1/m\), la “pendiente recíproca opuesta”. Podemos pensar en la pendiente de\(\vec u\) como\(5/3\), su “ascenso sobre carrera”. Un vector ortogonal a\(\vec u\) tendrá pendiente\(-3/5\). Hay muchas opciones de este tipo, aunque todas paralelas:
\[\langle -5,3\rangle \quad \text{or} \quad\langle 5,-3\rangle \quad \text{or} \quad \langle -10,6\rangle \quad \text{or} \quad \langle 15,-9\rangle ,\text{etc.}\]
- Hay infinitas direcciones en el espacio ortogonales a cualquier dirección dada, por lo que hay un número infinito de vectores no paralelos ortogonales a\(\vec v\). Como hay tantos, tenemos un gran margen de maniobra para encontrar algunos.
Una forma es escoger arbitrariamente valores para los dos primeros componentes, dejando el tercero desconocido. Por ejemplo, vamos\(\vec v_1 = \langle 2,7,z\rangle \). Si\(\vec v_1\) va a ser ortogonal a\(\vec v\), entonces\(\vec v_1\cdot\vec v = 0\),
\[2+14+3z=0 \quad \Rightarrow z = \frac{-16}{3}.\]
así que So\(\vec v_1 = \langle 2, 7, -16/3\rangle \) es ortogonal a\(\vec v\). Podemos aplicar una técnica similar dejando el primer o segundo componente desconocido.
Otro método para encontrar un vector ortogonal a\(\vec v\) refleja lo que hicimos en la parte 1. Vamos\(\vec v_2 = \langle -2,1,0\rangle \). Aquí cambiamos los dos primeros componentes de\(\vec v\), cambiando el signo de uno de ellos (similar al concepto “recíproco opuesto” anterior). Dejar que el tercer componente sea 0 efectivamente ignora al tercer componente de\(\vec v\), y es fácil ver que
\[\vec v_2\cdot\vec v = \langle -2,1,0\rangle \cdot\langle 1,2,3\rangle = 0.\]
Claramente\(\vec v_1\) y no\(\vec v_2\) son paralelos.
Una construcción importante se ilustra en la Figura 10.33, donde\(\vec v\) se esbozan vectores\(\vec u\) y. En la parte (a), se dibuja una línea punteada desde la punta de\(\vec u\) hasta la línea que contiene\(\vec v\), donde la línea punteada es ortogonal a\(\vec v\). En la parte (b), la línea punteada se sustituye por el vector\(\vec z\) y\(\vec w\) se forma, paralela a\(\vec v\). Queda claro por el diagrama que\(\vec u = \vec w+\vec z\). Lo importante de esta construcción es esto:\(\vec u\) se descompone como la suma de dos vectores, uno de los cuales es paralelo\(\vec v\) y otro perpendicular a\(\vec v\). Es difícil exagerar la importancia de esta construcción (como veremos en los próximos ejemplos).
Los vectores\(\vec w\),\(\vec z\) y\(\vec u\) como se muestra en la Figura 10.33 (b) forman un triángulo rectángulo, donde\(\vec u\) se etiqueta el ángulo entre\(\vec v\) y\(\theta\). Podemos encontrar\(\vec w\) en términos de\(\vec v\) y\(\vec u\).
Usando la trigonometría, podemos afirmar que
\[\norm{\vec w} = \norm{\vec u}\cos \theta. \label{eq:proj1}\]
También sabemos que\(\vec w\) es paralelo a a\(\vec v\); es decir, la dirección de\(\vec w\) es la dirección de\(\vec v\), descrita por el vector unitario\(\frac{1}{\norm{\vec v}}\vec v\). El vector\(\vec w\) es el vector en la dirección\(\frac{1}{\norm{\vec v}}\vec v\) con magnitud\(\norm{\vec u}\cos \theta\):
\ [\ begin {align*}
\ vec w &=\ Grande (\ norm {\ vec u}\ cos\ theta\ Grande)\ frac {1} {\ norm {\ vec v}}\ vec v}\ vec v
\\ text {Reemplazar\(\cos\theta\) usando Teorema 86:} &\\
&=\ left (\ norm {\ vec u}\ frac {\ vec u\ cdot\ v} {\ norma {\ vec u}\ norma {\ vec v}}\ derecha)\ frac {1} {\ norma {\ norma {\ vec v}}\ vec v\\
&=\ frac {\ vec u\ cdot\ vec v} {\ norm {\ vec v} ^2}\ vec v.\\
\ text {Ahora aplica Teorema 85.} &\\
&=\ frac {\ vec u\ cdot\ vec v} {\ vec v\ cdot\ vec v}\ vec v
\ end {alinear*}\]
Dado que esta construcción es tan importante, se le da un nombre especial.
Definición 59 proyección ortogonal
Dejar\(\vec u\) y\(\vec v\) ser dado. La proyección ortogonal de\(\vec u\) sobre\(\vec v\), denotada\(\text{proj}_{\vec v}\vec u\), es
\[\text{proj}_{\vec v}\vec u = \frac{\vec u \cdot \vec v}{\vec v \cdot \vec v}\vec v.\]
Ejemplo\(\PageIndex{5}\): Computing the orthogonal projection
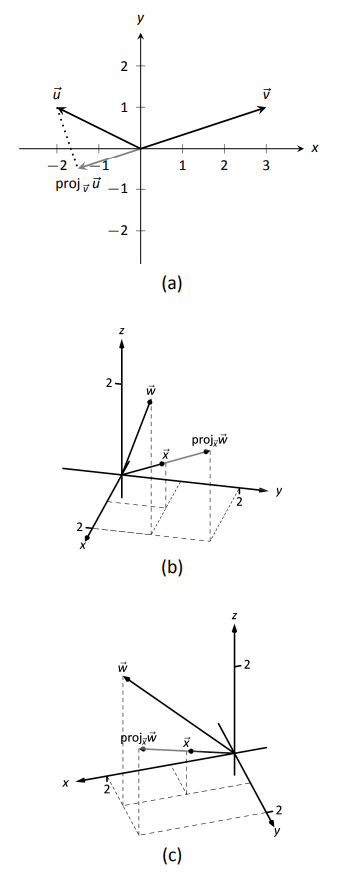
- Dejar\(\vec u= \langle -2,1\rangle \) y\(\vec v=\langle 3,1\rangle \). Encuentra\(\text{proj}_{\vec v}\vec u\) y dibuja los tres vectores con puntos iniciales en el origen.
- Dejar\(\vec w = \langle 2,1,3\rangle \) y\(\vec x = \langle 1,1,1\rangle \). Encuentra\(\text{proj}_{\vec x}\vec w\) y dibuja los tres vectores con puntos iniciales en el origen.
Solución
- Aplicando la Definición 59, tenemos
\[\begin{align*}\text{proj}_{\vec v}\vec u &= \frac{\vec u \cdot \vec v}{\vec v \cdot \vec v}\vec v \\&= \frac{-5}{10}\langle 3,1\rangle \\&= \langle -\frac32,-\frac12\rangle .\end{align*}\]
Vectores\(\vec u\),\(\vec v\) y\(\text{proj}_{\vec v}\vec u\) se esbozan en la Figura 10.34 (a). Observe cómo la proyección es paralela a\(\vec v\); es decir, se encuentra en la misma línea a través del origen que\(\vec v\), aunque apunta en sentido contrario. Eso se debe a que el ángulo entre\(\vec u\) y\(\vec v\) es obtuso (es decir, mayor que\(90^\circ\)).
- Aplicar la definición:
\[\begin{align*}\text{proj}_{\vec x}\vec w &= \frac{\vec w \cdot \vec x}{\vec x \cdot \vec x}\vec x \\&= \frac{6}{3}\langle 1,1,1\rangle \\&= \langle 2,2,2\rangle . \end{align*}\]
Estos vectores se esbozan en la Figura 10.34 (b), y nuevamente en la parte (c) desde una perspectiva diferente. Debido a la naturaleza de graficar estos vectores, el boceto en la parte (b) dificulta reconocer que la proyección dibujada tiene las propiedades geométricas que debería. La gráfica mostrada en la parte (c) ilustra mejor estas propiedades.
Consideremos la Figura 10.35 donde nuevamente se ilustra el concepto de la proyección ortogonal. Es claro que
\ [
\ vec u =\ texto {proj} _ {\ vec v}\ vec u +\ vec z.
\ etiqueta {eq:ortogproj}\]
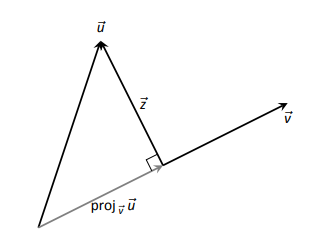
Como sabemos qué\(\vec u\) y\(\text{proj}_{\vec v}\vec u\) somos, podemos resolver\(\vec z\) y afirmar que
\[\vec z = \vec u - \text{proj}_{\vec v}\vec u.\]
Esto nos lleva a reescribir la Ecuación\ ref {eq:ortogproj} de una manera aparentemente tonta:\[\vec u = \text{proj}_{\vec v}\vec u + (\vec u - \text{proj}_{\vec v}\vec u).\]
Esto no es una tontería, como se señala en la siguiente Idea Clave. (Nota de notación: la expresión "\(\parallel \vec y\)" significa “es paralela a”\(\vec y\). Podemos usar esta notación para indicar "\(\vec x\parallel\vec y\)" que significa "\(\vec x\)es paralelo a”\(\vec y\). La expresión "\(\perp \vec y\)" significa “es ortogonal a”\(\vec y\), y se usa de manera similar).
idea clave 49 descomposición ortogonal de vectores
Dejar\(\vec u\) y\(\vec v\) ser dado. Entonces se\(\vec u\) puede escribir como la suma de dos vectores, uno de los cuales es paralelo a\(\vec v\), y uno de los cuales es ortogonal a\(\vec v\):
\[\vec u = \underbrace{\text{proj}_{\vec v}\vec u}_{\parallel\ \vec v}\ +\ (\underbrace{\vec u-\text{proj}_{\vec v}\vec u}_{\perp\ \vec v}).\]
Ilustramos el uso de esta igualdad en el siguiente ejemplo.
Ejemplo\(\PageIndex{6}\): Orthogonal decomposition of vectors
- Dejar\(\vec u = \langle -2,1\rangle \) y\(\vec v = \langle 3,1\rangle \) como en el Ejemplo 10.3.5. Descomponer\(\vec u\) como la suma de un vector paralelo a\(\vec v\) y un vector ortogonal a\(\vec v\).
- Dejar\(\vec w =\langle 2,1,3\rangle \) y\(\vec x =\langle 1,1,1\rangle \) como en el Ejemplo 10.3.5. Descomponer\(\vec w\) como la suma de un vector paralelo a\(\vec x\) y un vector ortogonal a\(\vec x\).
Solución
- En el Ejemplo 10.3.5, lo encontramos\(\text{proj}_{\vec v}\vec u = \langle -1.5,-0.5\rangle \). Let\[\vec z = \vec u - \text{proj}_{\vec v}\vec u = \langle -2,1\rangle - \langle -1.5,-0.5\rangle = \langle -0.5, 1.5\rangle .\]
¿Es\(\vec z\) ortogonal a\(\vec v\)? (Es decir,\(\vec z \perp\vec v\) ¿es?) Verificamos la ortogonalidad con el producto dot:
\[\vec z \cdot \vec v = \langle -0.5,1.5\rangle \cdot \langle 3,1\rangle =0.\]
Dado que el producto dot es 0, sabemos\(\vec z \perp \vec v\). Así:
\[\begin{align*}\vec u &= \text{proj}_{\vec v}\vec u\ +\ (\vec u - \text{proj}_{\vec v}\vec u) \\\langle -2,1\rangle &= \underbrace{\langle -1.5,-0.5\rangle }_{\parallel\ \vec v}\ +\ \underbrace{\langle -0.5,1.5\rangle }_{\perp \ \vec v}.\end{align*}\] - Encontramos en el Ejemplo 10.3.5 que\(\text{proj}_{\vec x}\vec w = \langle 2,2,2\rangle \). Aplicando la Idea Clave, tenemos:
\[\vec z = \vec w - \text{proj}_{\vec x}\vec w = \langle 2,1,3\rangle - \langle 2,2,2\rangle = \langle 0,-1,1\rangle .\]
Comprobamos para ver si\(\vec z \perp \vec x\):
\[\vec z \cdot \vec x = \langle 0,-1,1\rangle \cdot \langle 1,1,1\rangle = 0.\]
Dado que el producto punto es 0, sabemos que los dos vectores son ortogonales.
Ahora escribimos\(\vec w\) como la suma de dos vectores, uno paralelo y otro ortogonal a\(\vec x\):
\[\begin{align*}\vec w &= \text{proj}_{\vec x}\vec w\ +\ (\vec w - \text{proj}_{\vec x}\vec w) \\\langle 2,1,3\rangle &= \underbrace{\langle 2,2,2\rangle }_{\parallel\ \vec x}\ +\ \underbrace{\langle 0,-1,1\rangle }_{\perp \ \vec x} \end{align*}\]
Damos un ejemplo de dónde es útil esta descomposición.
Ejemplo\(\PageIndex{7}\): Orthogonally decomposing a force vector
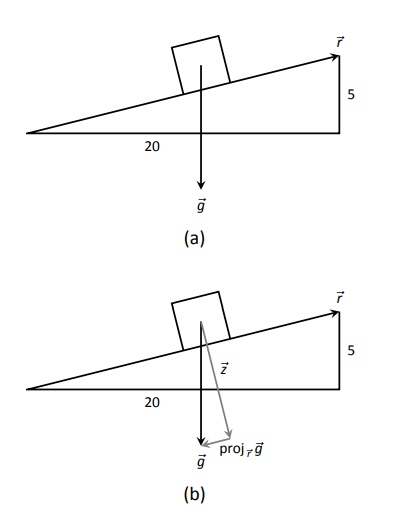
Considere la Figura 10.36 (a), que muestra una caja que pesa 50 lb en una rampa que se eleva 5 pies sobre un lapso de 20 pies. Encuentra los componentes de la fuerza, y sus magnitudes, que actúan sobre la caja (como se esboza en la parte (b) de la figura):
- en dirección a la rampa, y
- ortogonal a la rampa.
Solución
A medida que la rampa se eleva 5 pies sobre una distancia horizontal de 20 pies, podemos representar la dirección de la rampa con el vector\(\vec r= \langle 20,5\rangle \). La gravedad tira hacia abajo con una fuerza de 50lb, que representamos con\(\vec g = \langle 0,-50\rangle \).
- Para encontrar la fuerza de gravedad en la dirección de la rampa, calculamos\(\text{proj}_{\vec r}\vec g\):
\[\begin{align*}\text{proj}_{\vec r}\vec g &= \frac{\vec g \cdot \vec r}{\vec r \cdot \vec r}\vec r\\&= \frac{-250}{425}\langle 20,5\rangle \\&= \langle -\frac{200}{17},-\frac{50}{17}\rangle \approx \langle -11.76,-2.94\rangle .\end{align*}\]
La magnitud de\(\text{proj}_{\vec r}\vec g\) es\(\norm{\text{proj}_{\vec r}\vec g} = 50/\sqrt{17} \approx 12.13\text{lb}\). Aunque la caja pesa 50 lb, una fuerza de aproximadamente 12 lb es suficiente para evitar que la caja se deslice por la rampa.
- Para encontrar el componente\(\vec z\) de gravedad ortogonal a la rampa, utilizamos Key Idea 49.
\[\begin{align*}\vec z &= \vec g - \text{proj}_{\vec r}\vec g \\&= \langle \frac{200}{17},-\frac{800}{17}\rangle \approx \langle 11.76,-47.06\rangle .\end{align*}\]
La magnitud de esta fuerza es\(\norm{\vec z} \approx 48.51\) lb. En física e ingeniería, conocer esta fuerza es importante a la hora de calcular cosas como la fuerza de fricción estática. (Por ejemplo, podríamos calcular fácilmente si la fuerza de fricción estática por sí sola era suficiente para evitar que la caja se deslizara por la rampa).
Aplicación al Trabajo
En física, la aplicación de una fuerza\(F\) para mover un objeto en línea recta una distancia\(d\) produce trabajo; la cantidad de trabajo\(W\) es\(W=Fd\), (donde\(F\) está en la dirección de desplazamiento). La proyección ortogonal nos permite calcular el trabajo cuando la fuerza no está en la dirección de desplazamiento.
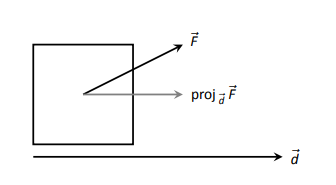
Considere la Figura 10.37, donde\(\vec F\) se está aplicando una fuerza a un objeto que se mueve en la dirección de\(\vec d\). (La distancia que recorre el objeto es la magnitud de\(\vec d\).) El trabajo realizado es la cantidad de fuerza en la dirección de\(\vec d\),\(\norm{\text{proj}_{\vec d}\vec F}\), times\(\norm d\):
\ [\ begin {align*}
\ norm {\ text {proj} _ {\ vec d}\ vec F}\ cdot\ norm d &=\ Big\ |\ frac {\ vec F\ cdot\ vec d} {\ vec d\ cdot\ cdot\ vec d}\ vec d\ Big\\ cdot\ norma d\\
& amp; =\ izquierda|\ frac {\ vec F\ cdot\ vec d} {\ norma d^2}\ derecha|\ cdot\ norma d\ cdot\ norma d\
&=\ frac {\ izquierda|\ vec F\ cdot\ vec d\ derecha|} {\ norma d^2}\ norma d^2\\
&= izquierda F\ cdot\ vec d\ derecha|.
\ end {alinear*}\]
La expresión\(\vec F \cdot \vec d\) será positiva si el ángulo entre\(\vec F\) y\(\vec d\) es agudo; cuando el ángulo es obtuso (de ahí que\(\vec F \cdot \vec d\) sea negativo), la fuerza está causando movimiento en la dirección opuesta a\(\vec d\), resultando en “trabajo negativo”. Queremos capturar este signo, así que bajamos el valor absoluto y lo encontramos\(W = \vec F \cdot \vec d\).
Definición 60 TRABAJO
Dejar\(\vec F\) ser una fuerza constante que mueve un objeto en línea recta de punto\(P\) a punto\(Q\). Vamos\(\vec d = \vec{PQ}\). El trabajo\(W\) realizado por\(\vec F\) lo largo\(\vec d\) es\(W = \vec F \cdot \vec d\).
Ejemplo\(\PageIndex{8}\): Computing work
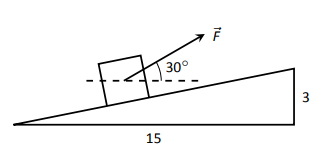
Un hombre desliza una caja a lo largo de una rampa que se eleva 3 pies sobre una distancia de 15 pies aplicando 50 lb de fuerza como se muestra en la Figura 10.38. Compute el trabajo realizado.
Solución
La cifra indica que la fuerza aplicada hace un\(30^\circ\) ángulo con la horizontal, por lo que\(\vec F = 50\langle \cos 30^\circ,\sin 30^\circ\rangle \approx \langle 43.3,25\rangle .\) La rampa está representada por\(\vec d = \langle 15,3\rangle \). El trabajo realizado es simplemente
\[\vec F \cdot \vec d = 50\langle \cos 30^\circ,\sin 30^\circ\rangle \cdot \langle 15,3\rangle \approx 724.5 \text{ft--lb}.\]
Observe cómo en realidad no calculamos la distancia que recorrió el objeto, ni la magnitud de la fuerza en la dirección de desplazamiento; ¡todo esto es calculado inherentemente por el producto puntual!
El producto punto es una poderosa manera de evaluar cálculos que dependen de los ángulos sin usar realmente ángulos. En la siguiente sección se explora otro “producto” sobre vectores, el producto cruzado. Una vez más, los ángulos juegan un papel importante, aunque de una manera muy diferente.