
8.4: Sistemas de Ecuaciones Lineales: Matriz Inversa
- Page ID
- 119474

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Concluimos la Sección 8.3 mostrando cómo podemos reescribir un sistema de ecuaciones lineales como la ecuación matricial\(AX=B\) donde\(A\) y\(B\) son matrices conocidas y la matriz\(X\) de solución de la ecuación corresponde a la solución del sistema. En esta sección, desarrollamos el método para resolver tal ecuación. Para ello, considere el sistema
\[ \left\{ \begin{array}{rcr} 2x-3y & = & 16 \\ 3x+4y & = & 7 \\ \end{array} \right.\nonumber\]
Para escribir esto como una ecuación matricial, seguimos el procedimiento descrito en la página 590. Encontramos que la matriz de coeficientes\(A\), la matriz de incógnitas\(X\) y la matriz\(B\) constante son
\[ \begin{array}{ccc} A = \left[ \begin{array}{rr} 2 & -3 \\ 3 & 4 \\ \end{array} \right] & X = \left[ \begin{array}{r} x \\ y \\ \end{array} \right] & B = \left[ \begin{array}{r} 16 \\ 7 \\ \end{array} \right] \end{array}\nonumber\]
Para motivar cómo resolvemos una ecuación matricial como\(AX = B\), volvemos a resolver una ecuación similar que involucra números reales. Considera la ecuación\(3x = 5\). Para resolver, simplemente dividimos ambas partes por\(3\) y obtenemos\(x = \frac{5}{3}\). ¿Cómo podemos ir definiendo un proceso análogo para matrices? Para responder a esta pregunta,\(3x=5\) volvemos a resolver, pero esta vez, prestamos atención a las propiedades de los números reales que se utilizan en cada paso. Recordemos que dividir por\(3\) es lo mismo que multiplicar por\(\frac{1}{3} = 3^{-1}\), el llamado inverso multiplicativo 1 de 3.
\[ \begin{array}{rclr} 3x & = & 5 \\ 3^{-1}(3x) & = & 3^{-1}(5) & \text{Multiply by the (multiplicative) inverse of \(3\)} \\ \left(3^{-1}\cdot 3\right) x & = & 3^{-1}(5) & \text{Associative property of multiplication} \\ 1 \cdot x & = & 3^{-1}(5) & \text{Inverse property} \\ x & = & 3^{-1}(5) & \text{Multiplicative Identity} \\ \end{array} \nonumber\]
Si queremos verificar nuestra respuesta, sustituimos\(x = 3^{-1}(5)\) en la ecuación original
\[ \begin{array}{rclr} 3x & \stackrel{?}{=} & 5 \\ 3\left( 3^{-1}(5)\right) & \stackrel{?}{=} & 5 \\ \left(3 \cdot 3^{-1}\right)(5) & \stackrel{?}{=} & 5 & \text{Associative property of multiplication} \\ 1 \cdot 5 & \stackrel{?}{=} & 5 & \text{Inverse property} \\ 5 & \stackrel{\checkmark}{=} & 5 & \text{Multiplicative Identity} \\ \end{array} \nonumber\]
Pensando en el Teorema 8.5, sabemos que la multiplicación matricial goza tanto de una propiedad asociativa como de una identidad multiplicativa. Lo que falta en la mezcla es un inverso multiplicativo para la matriz de coeficientes\(A\). Asumiendo que podemos encontrar tal bestia, podemos imitar nuestra solución (y verificar) de la\(3x=5\) siguiente manera
\[ \begin{array}{cc} \text{Solving \(AX = B\)} & \text{Checking our answer} \\ \begin{array}{rcl} AX & = & B \\ A^{-1}(AX) & = & A^{-1}B \\ \left(A^{-1}A\right) X & = & A^{-1}B \\ I_{2}X & = & A^{-1}B \\ X & = & A^{-1}B \\ \end{array} & \begin{array}{rcl} AX & \stackrel{?}{=} & B \\ A \left(A^{-1}B\right) & \stackrel{?}{=} & B \\ \left(AA^{-1}\right) B & \stackrel{?}{=}& B \\ I_{2}B & \stackrel{?}{=} & B \\ B & \stackrel{\checkmark}{=}& B \\ \end{array} \\ \end{array}\nonumber\]
La matriz\(A^{-1}\) se lee `\) A\) -inverso' y la definiremos formalmente más adelante en la sección. En esta etapa, no tenemos idea de si\(A^{-1}\) existe tal matriz, pero eso no nos disuadirá de intentar encontrarla. \ nota al pie {Al igual que la búsqueda de Carl para encontrar a Sasquatch.} Queremos\(A^{-1}\) satisfacer dos ecuaciones,\(A^{-1}A = I_{2}\) y\(AA^{-1} = I_{2}\), hacer\(A^{-1}\) necesariamente una\(2 \times 2\) matriz. \ nota al pie {Como la multiplicación matricial no es necesariamente conmutativa, en esta etapa, estas son dos ecuaciones diferentes.} De ahí, suponemos que\(A^{-1}\) tiene la forma
\[ A^{-1} = \left[ \begin{array}{rr} x_{1} & x_{2} \\ x_{3} & x_{4} \\ \end{array} \right]\nonumber\]
para números reales\(x_{1}\),\(x_{2}\),\(x_{3}\) y\(x_{4}\). Por razones que quedarán claras más adelante, enfocamos nuestra atención en la ecuación\(AA^{-1} = I_{2}\). Tenemos
\[\begin{array}{rcl} AA^{-1} & = & I_{2} \\ \left[ \begin{array}{rr} 2 & -3 \\ 3 & 4 \\ \end{array} \right] \left[ \begin{array}{rr} x_{1} & x_{2} \\ x_{3} & x_{4} \\ \end{array} \right] & = & \left[ \begin{array}{rr} 1 & 0 \\ 0 & 1 \\ \end{array} \right] \\ \left[ \begin{array}{rr} 2x_{1} - 3x_{3} & 2x_{2} - 3x_{4} \\ 3x_{1} +4x_{3} & 3x_{2} +4x_{4} \\ \end{array} \right] & = & \left[ \begin{array}{rr} 1 & 0 \\ 0 & 1 \\ \end{array} \right] \\ \end{array} \nonumber\]
Esto da lugar a dos sistemas más de ecuaciones
\[\begin{array}{cc} \left\{ \begin{array}{rcr} 2x_{1}-3x_{3} & = & 1 \\ 3x_{1}+4x_{3} & = & 0 \\ \end{array} \right. & \left\{ \begin{array}{rcr} 2x_{2}-3x_{4} & = & 0 \\ 3x_{2}+4x_{4} & = & 1 \\ \end{array} \right. \end{array}\nonumber\]
En este punto, puede parecer absurdo continuar con esta aventura. Después de todo, la intención era resolver un sistema de ecuaciones, y al hacerlo, hemos producido dos más para resolver. Recuerde, el objetivo de esta discusión es desarrollar un método general que, cuando se usa en los escenarios correctos, nos permita hacer mucho más que solo resolver un sistema de ecuaciones. Si nos ponemos a punto de resolver estos sistemas usando matrices aumentadas utilizando las técnicas de la Sección 8.2, vemos que no sólo ambos sistemas tienen la misma matriz de coeficientes, esta matriz de coeficientes no es otra que la matriz\(A\) misma. (Volveremos a esta observación en un momento.)
\[ \begin{array}{ccc} \left\{ \begin{array}{rcr} 2x_{1}-3x_{3} & = & 1 \\ 3x_{1}+4x_{3} & = & 0 \\ \end{array} \right. & \xrightarrow{\text{Encode into a matrix}} & \left[ \begin{array}{rr|r} 2 & -3 & 1 \\ 3 & 4 & 0 \\ \end{array} \right] \\ \left\{ \begin{array}{rcr} 2x_{2}-3x_{4} & = & 0 \\ 3x_{2}+4x_{4} & = & 1 \\ \end{array} \right. & \xrightarrow{\text{Encode into a matrix}} & \left[ \begin{array}{rr|r} 2 & -3 & 0 \\ 3 & 4 & 1 \\ \end{array} \right] \\ \end{array} \nonumber\]
Para resolver estos dos sistemas, utilizamos Gauss-Jordan Elimination para poner las matrices aumentadas en forma de escalón de fila reducida (dejamos los detalles al lector). Para el primer sistema, obtenemos
\[ \begin{array}{ccc} \left[ \begin{array}{rr|r} 2 & -3 & 1 \\ 3 & 4 & 0 \\ \end{array} \right] & \xrightarrow{\text{Gauss Jordan Elimination}} & \left[ \begin{array}{rr|r} 1 & 0 & \frac{4}{17} \\ 0 & 1 & -\frac{3}{17} \\ \end{array} \right] \\ \end{array}\nonumber\]
que da\(x_{1} = \frac{4}{17}\) y\(x_{3} = -\frac{3}{17}\). Para resolver el segundo sistema, utilizamos exactamente las mismas operaciones de fila, en el mismo orden, para poner su matriz aumentada en forma de escalón de fila reducida (Piense en por qué funciona eso) y obtenemos
\[ \begin{array}{ccc} \left[ \begin{array}{rr|r} 2 & -3 & 0 \\ 3 & 4 & 1 \\ \end{array} \right] & \xrightarrow{\text{Gauss Jordan Elimination}} & \left[ \begin{array}{rr|r} 1 & 0 & \frac{3}{17} \\ 0 & 1 & \frac{2}{17} \\ \end{array} \right] \\ \end{array}\nonumber\]
lo que significa\(x_{2} = \frac{3}{17}\) y\(x_{4} = \frac{2}{17}\). Por lo tanto,
\[ A^{-1} = \left[ \begin{array}{rr} x_{1} & x_{2} \\ x_{3} & x_{4} \\ \end{array} \right] = \left[ \begin{array}{rr} \frac{4}{17} & \frac{3}{17} \\ -\frac{3}{17} & \frac{2}{17} \\ \end{array} \right] \nonumber\]
Podemos comprobar para ver que\(A^{-1}\) se comporta como debería por computación\(AA^{-1}\)
\[ AA^{-1} = \left[ \begin{array}{rr} 2 & -3 \\ 3 & 4 \\ \end{array} \right] \left[ \begin{array}{rr} \frac{4}{17} & \frac{3}{17} \\ -\frac{3}{17} & \frac{2}{17} \\ \end{array} \right] = \left[ \begin{array}{rr} 1 & 0 \\ 0 & 1 \\ \end{array} \right] = I_{2} \, \, \checkmark\nonumber\]
Como bono añadido,
\[ A^{-1}A = \left[ \begin{array}{rr} \frac{4}{17} & \frac{3}{17} \\ -\frac{3}{17} & \frac{2}{17} \\ \end{array} \right]\left[ \begin{array}{rr} 2 & -3 \\ 3 & 4 \\ \end{array} \right] = \left[ \begin{array}{rr} 1 & 0 \\ 0 & 1 \\ \end{array} \right] = I_{2} \, \, \checkmark\nonumber\]
Ahora podemos volver al problema que nos ocupa. De nuestra discusión al inicio de la sección de la página 599, sabemos
\[ X = A^{-1}B = \left[ \begin{array}{rr} \frac{4}{17} & \frac{3}{17} \\ -\frac{3}{17} & \frac{2}{17} \\ \end{array} \right]\left[ \begin{array}{r} 16 \\ 7 \\ \end{array} \right] = \left[ \begin{array}{r} 5 \\ -2 \\ \end{array} \right] \nonumber\]
para que nuestra solución final al sistema sea\((x,y) = (5,-2)\).
Como mencionamos, el objetivo de este ejercicio no era sólo resolver el sistema de ecuaciones lineales, sino desarrollar un método general para encontrar\(A^{-1}\). Ahora damos un paso atrás y analizamos la discusión anterior en un contexto más general. Al resolver for\(A^{-1}\), utilizamos dos matrices aumentadas, las cuales contenían las mismas entradas que\(A\)
\[ \begin{aligned} &{\left[\begin{array}{rr|r} 2 & -3 & 1 \\ 3 & 4 & 0 \end{array}\right]=\left[\begin{array}{l|l} A & 1 \\ &0 \end{array}\right]} \\ &{\left[\begin{array}{rr|r} 2 & -3 & 0 \\ 3 & 4 & 1 \end{array}\right]=\left[\begin{array}{l|l} A & 0 \\ &1 \end{array}\right]} \end{aligned} \nonumber\]
También observamos que las formas de escalón de filas reducidas de estas matrices aumentadas se pueden escribir como
\[ \begin{aligned} &{\left[\begin{array}{rr|r} 1 & 0 & \frac{4}{17} \\ 0 & 1 & -\frac{3}{17} \end{array}\right]=\left[\begin{array}{c|c} I_{2} & x_{1} \\ &x_{3} \end{array}\right]} \\ &{\left[\begin{array}{ll|l} 1 & 0 & \frac{3}{17} \\ 0 & 1 & \frac{2}{17} \end{array}\right]=\left[\begin{array}{c|c} I_{2} & x_{2} \\ &x_{4} \end{array}\right]} \end{aligned} \nonumber\]
donde hemos identificado las entradas a la izquierda de la barra vertical como la identidad\(I_{2}\) y las entradas a la derecha de la barra vertical como las soluciones a nuestros sistemas. El largo y corto del proceso de solución se puede resumir como
\ [\ begin {aligned}
& {\ left [\ begin {array} {l|l}
A & 1\\
&0
\ end {array}\ right]\ quad\ stackrel {\ text {Gauss Jordan Elimination}} {\ longrightarrow}\ left [\ begin {array} {l|l}
I_ {2} & x_ {1}\\
&x_ {3}
\ end {array}\ right]}\\
& {\ left [\ begin {array} {l|l}
A & 0\\
& 1
\ end {array}\ right]\ stackrel {\ text {Gauss Jordan Elimination}} {\ longrightarrow}\ left [\ begin {array} {l|l}
I_ {2} & x_ {2}\\
&x_ {4}
\ end {array}\ derecha]}
\ end {alineado}\ nonumber\]
Dado que las operaciones de fila para ambos procesos son las mismas, toda la aritmética en el lado izquierdo de la barra vertical es idéntica en ambos problemas. La única diferencia entre los dos procesos es lo que sucede con las constantes a la derecha de la barra vertical. Mientras los mantengamos separados en columnas, podemos combinar nuestros esfuerzos en una matriz aumentada “súper dimensionada” y describir el proceso anterior como
\ [\ left [\ begin {array} {l|ll}
A & 1 & 0\\
&0 & 1
\ end {array}\ right]\ quad\ stackrel {\ text {Gauss Jordan Elimination}} {\ longrightarrow}\ left [\ begin {array} {l|ll}
I_ {2} & x_ {1} & x_ {2}\\
&x_ {3} & x_ {4}
\ end {array}\ derecha]\ nonumber\]
Tenemos la matriz de identidad\(I_{2}\) que aparece como el lado derecho de la primera matriz aumentada de gran tamaño y el lado izquierdo de la segunda matriz aumentada de gran tamaño. Para nuestra sorpresa y deleite, los elementos del lado derecho de la segunda matriz aumentada de gran tamaño no son otros que los que la componen\(A^{-1}\). Por lo tanto, tenemos
\[ \begin{array}{ccc} \left[ \begin{array}{c|c} A & I_{2} \end{array} \right] & \xrightarrow{\text{Gauss Jordan Elimination}} & \left[ \begin{array}{c|c} I_{2} & A^{-1} \end{array} \right] \end{array}\nonumber\]
En otras palabras, el proceso de\(A^{-1}\) búsqueda de una matriz\(A\) puede verse como la realización de una serie de operaciones de fila que se\(A\) transforman en la matriz de identidad de la misma dimensión. Podemos ver este proceso de la siguiente manera. Al tratar de encontrar\(A^{-1}\), estamos tratando de `deshacer' la multiplicación por la matriz\(A\). La matriz de identidad en la matriz aumentada de gran tamaño\([A | I]\) mantiene una memoria de ejecución de todos los movimientos requeridos para `deshacer'\(A\). Esto da como resultado exactamente lo que queremos,\(A^{-1}\). Ahora estamos listos para formalizar y generalizar la discusión que antecede. Comenzamos con la definición formal de una matriz invertible.
Se dice que una\(n \times n\) matriz\(A\) es\ index {matrix! invertible}\ index {matriz! multiplicativo inverso}\ index {invertible! matrix}\ textbf {invertible} si existe una matriz\(A^{-1}\), lea `\) A\) inverso', tal que\(A^{-1}A = AA^{-1}=I_{n}\). \ index {inversa! matriz, multiplicativa}
Obsérvese que, como consecuencia de nuestra definición, las matrices invertibles son cuadradas, y como tales, las condiciones en la Definición 8.11 obligan a la matriz\(A^{-1}\) a tener las mismas dimensiones que\(A\), es decir,\(n \times n\). Dado que no todas las matrices son cuadradas, no todas las matrices son invertibles. No obstante, el hecho de que una matriz sea cuadrada no garantiza que sea invertible. (Ver los ejercicios.) Nuestro primer resultado resume algunas de las características importantes de las matrices invertibles y sus inversas.
Supongamos que\(A\) es una\(n \times n\) matriz.
- Si\(A\) es invertible entonces\(A^{-1}\) es único.
- \(A\)es invertible si y solo si\(AX = B\) tiene una solución única para cada\(n \times r\) matriz\(B\).
Las pruebas de las propiedades en el Teorema 8.6 se basan en una mezcla saludable de definición y aritmética matricial. Para establecer la primera propiedad, asumimos que\(A\) es invertible y suponemos las matrices\(B\) y\(C\) actúan como inversas para\(A\). Es decir,\(BA = AB = I_{n}\) y\(CA = AC = I_{n}\). Tenemos que demostrar eso\(B\) y\(C\) somos, de hecho, la misma matriz. Para ver esto, señalamos que\(B = I_{n}B = (CA)B = C(AB) = CI_{n} = C\). De ahí que dos matrices cualesquiera que actúen como\(A^{-1}\) son, de hecho, la misma matriz 4. Para probar la segunda propiedad del Teorema 8.6, observamos que si\(A\) es invertible entonces la discusión en la página 599 muestra la solución\(AX=B\) a ser\(X = A^{-1}B\), y ya que\(A^{-1}\) es única, así es\(A^{-1}B\). Por el contrario, si\(AX = B\) tiene una solución única para cada\(n \times r\) matriz\(B\), entonces, en particular, hay una solución única\(X_{0}\) a la ecuación\(AX = I_{n}\). La matriz de soluciones\(X_{0}\) es nuestro candidato para\(A^{-1}\). Tenemos\(AX_{0} = I_{n}\) por definición, pero tenemos que mostrar también\(X_{0}A = I_{n}\). Para ello, señalamos que\(A\left(X_{0}A\right) = \left(AX_{0}\right)A = I_{n}A = A\). En otras palabras, la matriz\(X_{0}A\) es una solución a la ecuación\(AX = A\). Claramente, también\(X=I_{n}\) es una solución a la ecuación\(AX = A\), y como estamos asumiendo cada ecuación como una solución\ textit {única}, debemos tener\(X_{0}A = I_{n}\). De ahí, tenemos\(X_{0}A = AX_{0} = I_{n}\), así que eso\(X_{0} = A^{-1}\) y\(A\) es invertible. La discusión anterior justifica nuestra búsqueda de encontrar\(A^{-1}\) usando nuestro enfoque de matriz aumentada de gran tamaño
\[ \begin{array}{ccc} \left[ \begin{array}{c|c} A & I_{n} \\ \end{array} \right] & \xrightarrow{\text{Gauss Jordan Elimination}} & \left[ \begin{array}{c|c} I_{n} & A^{-1} \\ \end{array} \right] \end{array}\nonumber\]
Estamos, en esencia, tratando de encontrar la solución única a la ecuación\(AX = I_{n}\) usando operaciones de fila.
¿Qué significa todo esto para un sistema de ecuaciones lineales? El teorema\ ref {inversematrixprops} nos dice que si escribimos el sistema en la forma\(AX=B\), entonces si la matriz de coeficientes\(A\) es invertible, solo hay una solución al sistema\(-\) que es, si\(A\) es invertible, el sistema es consistente e independiente. \ nota {Se puede demostrar que una matriz es invertible si y solo si cuando sirve como matriz de coeficientes para un sistema de ecuaciones, el sistema siempre es consistente independiente. Equivale a la segunda propiedad en Teorema\ ref {inversematrixprops} donde las matrices\(B\) están restringidas a ser\(n \times 1\) matrices. Observamos que, debido a cómo se define la multiplicación matricial, poder encontrar soluciones únicas\(AX = B\) para\(n \times 1\) matrices\(B\) le da la misma afirmación sobre la resolución de tales ecuaciones para\(n \times r\) matrices\(-\) ya que podemos encontrar una solución única para ellas una columna a la vez.} También sabemos que el proceso por el que nos encontramos\(A^{-1}\) está determinado completamente por\(A\), y no por las constantes en\(B\). Esto responde a la pregunta de por qué nos molestaríamos en hacer operaciones de fila en una matriz aumentada de gran tamaño para encontrar\(A^{-1}\) en lugar de una matriz aumentada ordinaria para resolver un sistema; al encontrar\(A^{-1}\) hemos hecho todas las operaciones de fila que siempre necesitamos hacer, de una vez por todas, ya que podemos resolver rápidamente \ textit {any} ecuación\(AX = B\) usando\ textit {uno} multiplicación,\(A^{-1}B\).
Let\(A = \left[ \begin{array}{rrr} 3 & 1 & \hphantom{-}2 \\ 0 & -1 & 5 \\ 2 & 1 & 4 \\ \end{array} \right]\)
- Utilice operaciones de fila para encontrar\(A^{-1}\). Comprueba tu respuesta encontrando\(A^{-1}A\) y\(AA^{-1}\).
- Utilizar\(A^{-1}\) para resolver los siguientes sistemas de ecuaciones
- \(\left\{ \begin{array}{rcl} 3x+y+2z & = & 26 \\-y+5z & = & 39 \\ 2x+y+4z&=& 117 \\ \end{array} \right.\)
- \(\left\{ \begin{array}{rcl} 3x+y+2z & = & 4 \\-y+5z & = & 2 \\ 2x+y+4z&=& 5 \\ \end{array} \right.\)
- \(\left\{ \begin{array}{rcl} 3x+y+2z & = & 1 \\-y+5z & = & 0 \\ 2x+y+4z&=& 0 \\ \end{array} \right.\)
Solución
- Comenzamos con una matriz aumentada de gran tamaño y procedemos con la eliminación de Gauss-Jordan.
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 3 & 1 & \hphantom{-}2 & 1 & 0 & 0 \\ 0 & -1 & 5 & 0 & 1 & 0 \\ 2 & 1 & 4 & 0 & 0 & 1 \\ \end{array} \right] & \xrightarrow[\text{with \(\frac{1}{3}R1\)}]{\text{Replace \(R1\)}} & \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & \hphantom{-}\frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & -1 & 5 & 0 & 1 & 0 \\ 2 & 1 & 4 & 0 & 0 & 1 \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & \hphantom{-}\frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & -1 & 5 & 0 & 1 & 0 \\ 2 & 1 & 4 & 0 & 0 & 1 \\ \end{array} \right] \xrightarrow[\text{\)-2R1+R3\)}]{\text{Replace \(R3\) with}} \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & \hphantom{-}\frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & -1 & 5 & 0 & 1 & 0 \\ 0 & \frac{1}{3} & \frac{8}{3} & -\frac{2}{3} & 0 & 1 \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & \hphantom{-}\frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & -1 & 5 & 0 & 1 & 0 \\ 0 & \frac{1}{3} & \frac{8}{3} & -\frac{2}{3} & 0 & 1 \\ \end{array} \right] & \xrightarrow[\text{with \((-1)R2\)}]{\text{Replace \(R2\)}} & \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & \hphantom{-}0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & \frac{1}{3} & \frac{8}{3} & -\frac{2}{3} & 0 & 1 \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & \hphantom{-}0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & \frac{1}{3} & \frac{8}{3} & -\frac{2}{3} & 0 & 1 \\ \end{array} \right] \xrightarrow[\text{\)-\frac{1}{3}R2+R3\)}]{\text{Replace \(R3\) with}} \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & \hphantom{-}0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & 0 & \frac{13}{3} & -\frac{2}{3} & \frac{1}{3} & 1 \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & \hphantom{-}0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & 0 & \frac{13}{3} & -\frac{2}{3} & \frac{1}{3} & 1 \\ \end{array} \right] & \xrightarrow[\text{with \(\frac{3}{13}R3\)}]{\text{Replace \(R3\)}} & \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & 0 & 1 & -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \hphantom{-}\frac{1}{3} & \frac{2}{3} & \frac{1}{3} & 0 & 0 \\ 0 & 1 & -5 & 0 & -1 & 0 \\ 0 & 0 & 1 & -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right] & \xrightarrow[\text{\begin{tabular}{c} Replace \(R2\) with \\ \(5R3+R2\) \end{tabular}}]{\text{\begin{tabular}{c} Replace \(R1\) with \\ \(-\frac{2}{3}R3+R1\) \end{tabular}}} & \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & 0 & \frac{17}{39} & -\frac{2}{39} & -\frac{2}{13} \\ 0 & 1 & 0 &-\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ 0 & 0 & 1 & -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right] \end{array}\nonumber\]
\[\begin{array}{ccc} \left[ \begin{array}{rrr|rrr} 1 & \frac{1}{3} & 0 & \frac{17}{39} & -\frac{2}{39} & -\frac{2}{13} \\ 0 & 1 & 0 &-\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ 0 & 0 & 1 & -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right] & \xrightarrow[\text{\)-\frac{1}{3}R2+R1\)}]{\text{Replace \(R1\) with}} & \left[ \begin{array}{rrr|rrr} 1 & 0 & 0 & \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ 0 & 1 & 0 &-\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ 0 & 0 & 1 & -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right] \end{array}\nonumber\]
Nos encontramos\(A^{-1} = \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \\ \end{array} \right]\). Para verificar nuestra respuesta, calculamos
\[ A^{-1}A = \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \end{array} \right]\left[ \begin{array}{rrr} 3 & 1 & \hphantom{-}2 \\ 0 & -1 & 5 \\ 2 & 1 & 4 \end{array} \right] = \left[ \begin{array}{rrr} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right] = I_{3} \, \, \checkmark \nonumber\]
y
\[ AA^{-1} = \left[ \begin{array}{rrr} 3 & 1 & \hphantom{-}2 \\ 0 & -1 & 5 \\ 2 & 1 & 4 \end{array} \right] \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \end{array} \right] = \left[ \begin{array}{rrr} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{array} \right] = I_{3} \, \, \checkmark \nonumber\]
- Cada uno de los sistemas en esta parte tiene\(A\) como su matriz de coeficientes. La única diferencia entre los sistemas son las constantes que es la matriz\(B\) en la ecuación matricial asociada\(AX=B\). Resolvemos cada uno de ellos usando la fórmula\(X = A^{-1}B\).
- \(X = A^{-1}B = \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \end{array} \right] \left[ \begin{array}{r} 26 \\ 39 \\ 117 \end{array}\right] = \left[ \begin{array}{r} -39 \\ 91 \\ 26 \end{array}\right]\). Nuestra solución es\((-39,91,26)\).
- \(X = A^{-1}B = \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \end{array} \right] \left[ \begin{array}{r} 4 \\ 2 \\ 5 \end{array}\right] = \left[ \begin{array}{r} \frac{5}{13} \\ \frac{19}{13} \\ \frac{9}{13} \end{array}\right]\). Obtenemos\(\left( \frac{5}{13}, \frac{19}{13}, \frac{9}{13} \right)\).
- \(X = A^{-1}B = \left[ \begin{array}{rrr} \frac{9}{13} & \frac{2}{13} & -\frac{7}{13} \\ -\frac{10}{13} & -\frac{8}{13} & \frac{15}{13} \\ -\frac{2}{13} & \frac{1}{13} & \frac{3}{13} \end{array} \right] \left[ \begin{array}{r} 1 \\ 0 \\ 0 \end{array}\right] = \left[ \begin{array}{r} \frac{9}{13} \\ -\frac{10}{13} \\ -\frac{2}{13} \end{array}\right]\). Nos encontramos\(\left( \frac{9}{13}, -\frac{10}{13}, -\frac{2}{13} \right)\). 6
En el Ejemplo 8.4.1, vemos que encontrar una matriz inversa puede permitirnos resolver toda una familia de sistemas de ecuaciones lineales. Hay muchos ejemplos de donde esto viene muy bien `en la naturaleza”, y elegimos nuestro ejemplo para esta sección del campo de la electrónica. También aprovechamos esta oportunidad para presentarle al alumno cómo podemos calcular matrices inversas usando la calculadora.
Considera el diagrama de circuito a continuación. 7 Contamos con dos baterías con voltajes de fuente\(V\!\!B_{1}\) y\(V\!\!B_{2}\), medidas en voltios\(V\), junto con seis resistencias con resistencias\(R_{1}\) a través\(R_{6}\), medidas en kiloohmios,\(k\Omega\). Usando la Ley de Ohm y la Ley de Voltaje de Kirchhoff, podemos relacionar el voltaje suministrado al circuito por las dos baterías con las caídas de voltaje a través de las seis resistencias para encontrar las cuatro corrientes de `malla':\(i_{1}\),\(i_{2}\),\(i_{3}\) y\(i_{4}\), medidas en miliamperios ,\(mA\). Si pensamos en electrones que fluyen a través del circuito, podemos pensar en las fuentes de voltaje como proporcionar el `push' que hace que los electrones se muevan, las resistencias como obstáculos para que los electrones superen, y la corriente de malla como una tasa neta de flujo de electrones alrededor de los bucles indicados.
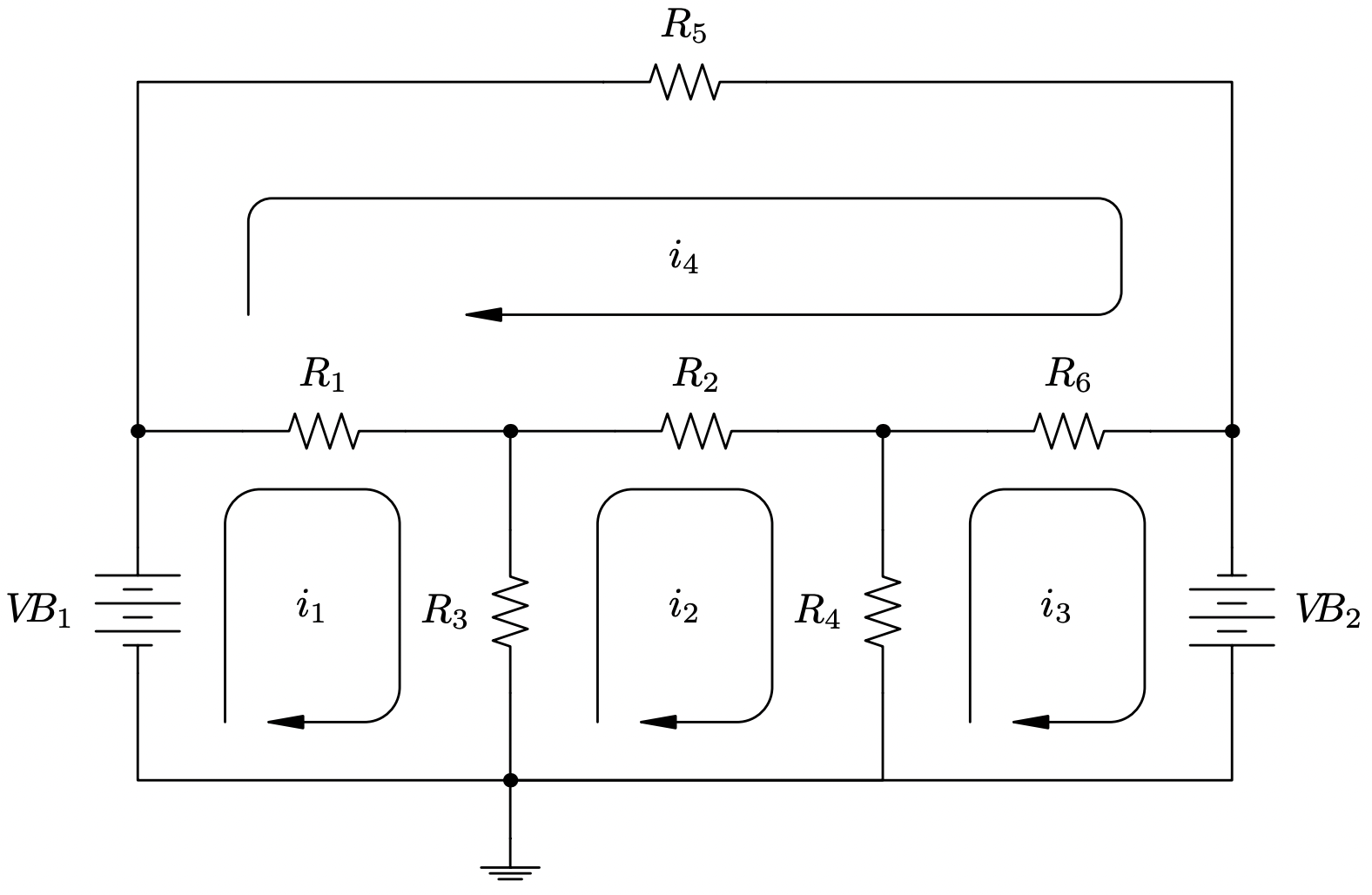
El sistema de ecuaciones lineales asociadas a este circuito es
\[ \left\{ \begin{array}{rcl} \left(R_{1} + R_{3}\right)i_{1} - R_{3}i_{2} - R_{1}i_{4} & = & V\!\!B_{1} \\ -R_{3}i_{1} + \left(R_{2} + R_{3} + R_{4}\right)i_{2} - R_{4}i_{3} - R_{2}i_{4} & = & 0 \\ -R_{4}i_{2} + \left(R_{4} + R_{6}\right)i_{3} - R_{6}i_{4} & = & -V\!\!B_{2} \\ -R_{1}i_{1} - R_{2}i_{2} - R_{6}i_{3} + \left(R_{1} + R_{2} + R_{5} + R_{6}\right)i_{4} & = & 0 \\ \end{array} \right.\nonumber\]
- Suponiendo que las resistencias son todas\(1 k\Omega\), encuentre las corrientes de malla si los voltajes de la batería son
- \(V\!\!B_{1} = 10 V\)y\(V\!\!B_{2} = 5 V\)
- \(V\!\!B_{1} = 10 V\)y\(V\!\!B_{2} = 0 V\)
- \(V\!\!B_{1} = 0 V\)y\(V\!\!B_{2} = 10 V\)
- \(V\!\!B_{1} = 10 V\)y\(V\!\!B_{2} = 10 V\)
- Suponiendo\(V\!\!B_{1} = 10 V\) y\(V\!\!B_{2} = 5 V\), encuentre las posibles combinaciones de resistencias que producirían las corrientes de malla que encontraste en 1 (a).
Solución
- Sustituyendo los valores de resistencia en nuestro sistema de ecuaciones, obtenemos
\[ \left\{ \begin{array}{rcl} 2i_{1} - i_{2}-i_{4} & = & V\!\!B_{1} \\ -i_{1} + 3i_{2} - i_{3} - i_{4} & = & 0 \\ -i_{2} + 2i_{3} - i_{4} & = & -V\!\!B_{2} \\ -i_{1} - i_{2}-i_{3} + 4i_{4} & = & 0 \\ \end{array} \right.\nonumber\]
Esto corresponde a la ecuación matricial\(AX = B\) donde
\[ \begin{array}{ccc} A = \left[ \begin{array}{rrrr} 2 & -1 & 0 & -1 \\ -1 & 3 & -1 & -1 \\ 0 & -1 & 2 & -1 \\ -1 & -1 & -1 & 4 \end{array} \right] & X = \left[ \begin{array}{r} i_{1} \\ i_{2} \\ i_{3} \\ i_{4} \\ \end{array} \right] & B = \left[ \begin{array}{r} V\!\!B_{1} \\ 0 \\ -V\!\!B_{2} \\ 0 \end{array} \right] \end{array}\nonumber\]
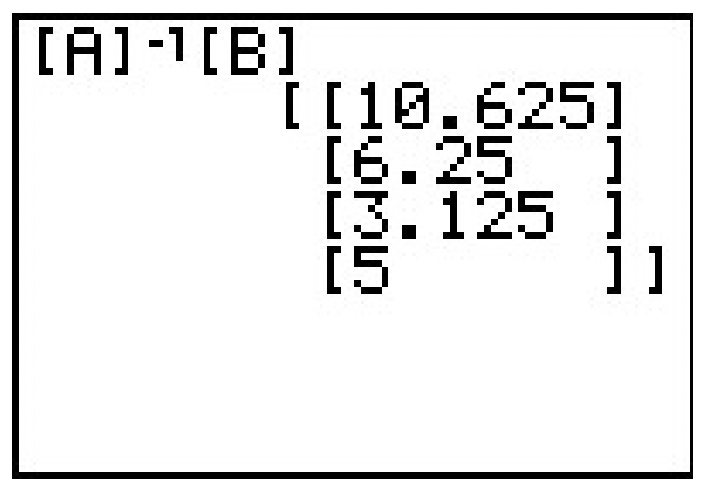
Cuando ingresamos la matriz\(A\) en la calculadora, encontramos
de la que tenemos
\[A^{-1} = \left[ \begin{array}{rrrr} 1.625 & \hphantom{2}1.25 & 1.125 & \hphantom{2.2}1 \\ 1.25 & 1.5 & 1.25 & 1 \\ 1.125 & 1.25 & 1.625 & 1 \\ 1 & 1 & 1 & 1 \end{array} \right].\nonumber\]
Para resolver los cuatro sistemas que se nos han dado, encontramos\(X=A^{-1}B\) dónde el valor de\(B\) está determinado por los valores dados de\(V\!\!B_{1}\) y\(V\!\!B_{2}\)
\[\begin{array}{cccc} \text{1 (a)} \quad B = \left[ \begin{array}{r} 10 \\ 0 \\ -5 \\ 0 \end{array} \right], & \text{1 (b)} \quad B = \left[ \begin{array}{r} 10 \\ 0 \\ 0 \\ 0 \end{array} \right], & \text{1 (c)} \quad B = \left[ \begin{array}{r} 0 \\ 0 \\ -10 \\ 0 \end{array} \right], & \text{1 (d)} \quad B = \left[ \begin{array}{r} 10 \\ 0 \\ 10 \\ 0 \end{array} \right] \end{array} \nonumber\]
- Para\(V\!\!B_{1} = 10 V\) y\(V\!\!B_{2} = 5 V\), la calculadora da\(i_{1} = 10.625 \, \, mA\),\(i_{2} = 6.25 \, \, mA\),\(i_{3} = 3.125 \, \, mA\), y\(i_{4} = 5 \, \, mA\). Incluimos una captura de pantalla de la calculadora a continuación para esta parte (¡y solo esta parte!) para referencia.
- Al mantener\(V\!\!B_{1} = 10 V\) y ajustar\(V\!\!B_{2} = 0 V\), estamos quitando el efecto de la segunda batería. Obtenemos\(i_{1} = 16.25 \, \, mA\),\(i_{2} = 12.5 \, \, mA\),\(i_{3} = 11.25 \, \, mA\), y\(i_{4} = 10 \, \, mA\).
- La parte (c) es una situación simétrica a la parte (b) en tanto que estamos poniendo a cero\(V\!\!B_{1}\) y haciendo\(V\!\!B_{2} = 10\). Encontramos\(i_{1} = -11.25 \, \, mA\),\(i_{2} = -12.5 \, \, mA\),\(i_{3} = -16.25 \, \, mA\), y\(i_{4} = -10 \, \, mA\), donde los negativos indican que la corriente fluye en sentido contrario como se indica en el diagrama. Se anima al lector a estudiar la simetría aquí, y si es necesario, sostenga un espejo al diagrama para literalmente `ver' lo que está sucediendo.
- Para\(V\!\!B_{1} = 10 V\) y\(V\!\!B_{2} = 10 V\), obtenemos\(i_{1} = 5 \, \, mA\),\(i_{2} = 0 \, \, mA\),\(i_{3} = -5 \, \, mA\), y\(i_{4} = 0 \, \, mA\). Las corrientes de malla\(i_{2}\) y\(i_{4}\) ser cero es consecuencia de que ambas baterías “empujan” en direcciones iguales pero opuestas, haciendo que el flujo neto de electrones en estas dos regiones se cancele.
- Ahora volteamos las tornos y se les da\(V\!\!B_{1} = 10 V\)\(V\!\!B_{2} = 5 V\),\(i_{1} = 10.625 \, \, mA\),,\(i_{2} = 6.25 \, \, mA\),\(i_{3} = 3.125 \, \, mA\) y\(i_{4} = 5 \, \, mA\) y nuestras incógnitas son los valores de resistencia. Reescribiendo nuestro sistema de ecuaciones, obtenemos
\[ \left\{ \begin{array}{rcr} 5.625R_{1} + 4.375R_{3}& = & 10 \\ 1.25R_{2} - 4.375R_{3} + 3.125R_{4}& = & 0 \\ -3.125R_{4} - 1.875R_{6} & = & -5 \\ -5.625R_{1} - 1.25R_{2} + 5R_{5} + 1.875R_{6} & = & 0 \\ \end{array} \right.\nonumber\]
La matriz de coeficientes para este sistema es\(4 \times 6\) (4 ecuaciones con 6 incógnitas) y por lo tanto no es invertible. Sabemos, sin embargo, que este sistema es consistente, ya que establecer todos los valores de resistencia iguales a\(1\) corresponde a nuestra situación en el problema 1a. Esto significa que tenemos un sistema consistente indeterminado que es necesariamente dependiente. Para resolver este sistema, lo codificamos en una matriz aumentada
\[ \left[ \begin{array}{rrrrrr|r} 5.25 & 0 & 4.375 & 0 & \hphantom{1.2}0 & 0 & 10 \\ 0 & 1.25 & -4.375 & 3.125 & 0 & 0 & 0 \\ 0 & 0 & 0 & -3.125 & 0 & -1.875 & -5 \\ -5.625 & -1.25 & 0 & 0 & 5 & 1.875 & 0 \\ \end{array} \right] \nonumber\]
y usa la calculadora para escribir en forma de escalón de fila reducida
\[\left[ \begin{array}{rrrrrr|r} 1 & \hphantom{-1.}0 & 0.\overline{7} & \hphantom{-1.}0 & \hphantom{-1.}0 & 0 & 1.\overline{7} \\ 0 & 1 & -3.5 & 0 & 0 & -1.5 & -4 \\ 0 & 0 & 0 & 1 & 0 & 0.6 & 1.6 \\ 0 & 0 & 0 & 0 & 1 & 0 & 1 \\ \end{array} \right] \nonumber\]
Decodificando este sistema de la matriz, obtenemos
\[ \left\{ \begin{array}{rcr} R_{1} + 0.\overline{7}R_{3}& = & 1.\overline{7} \\ R_{2} - 3.5R_{3} - 1.5R_{6}& = & -4 \\ R_{4} + 0.6R_{6} & = & 1.6 \\ R_{5}& = & 1 \\ \end{array} \right.\nonumber\]
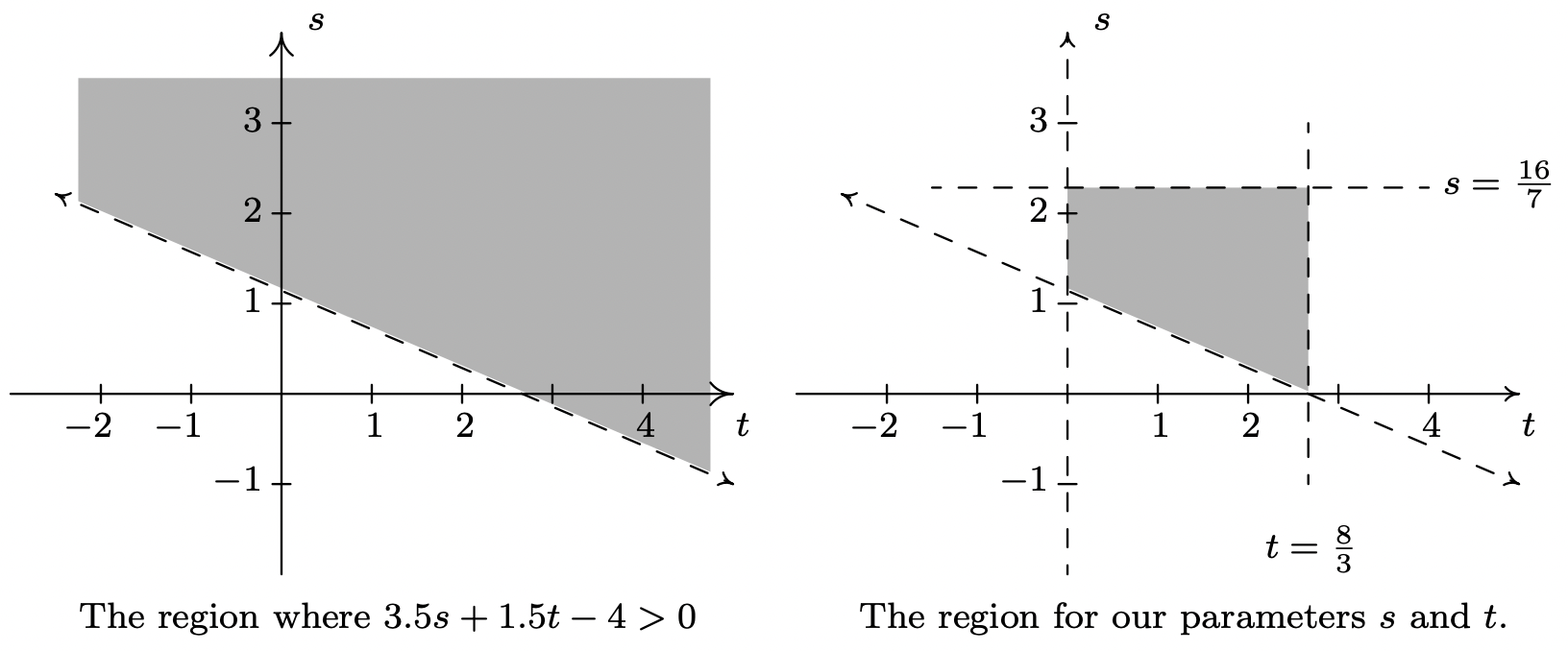
Tenemos puede resolver por\(R_{1}\),\(R_{2}\),\(R_{4}\) y\(R_{5}\) dejando\(R_{3}\) y\(R_{6}\) como variables libres. Etiquetado\(R_{3} = s\) y\(R_{6} = t\), tenemos\(R_{1} = - 0.\overline{7}s + 1.\overline{7}\),\(R_{2} = 3.5s + 1.5t - 4\),\(R_{4} = -0.6t + 1.6\) y\(R_{5} = 1\). Dado que los valores de resistencia son siempre positivos, necesitamos restringir nuestros valores de\(s\) y\(t\). Sabemos\(R_{3} = s > 0\) y cuando combinamos eso con\(R_{1} = - 0.\overline{7}s + 1.\overline{7} >0\), obtenemos\(0 < s < \frac{16}{7}\). De igual manera,\(R_{6} = t > 0\) y con\(R_{4} = -0.6t + 1.6 > 0\), nos encontramos\(0 < t < \frac{8}{3}\). Para visualizar la desigualdad\(R_{2} = 3.5s + 1.5t - 4 > 0\), graficamos la línea\(3.5s + 1.5t - 4 =0\) en el\(st\) plano y sombreamos en consecuencia. 8 Imponiendo las condiciones adicionales\(0 < s < \frac{16}{7}\) y\(0 < t < \frac{8}{3}\), encontramos nuestros valores\(s\) y\(t\) restringidos a la región representada a la derecha. Usando el método roster, los valores de\(s\) y\(t\) se extraen de la región\(\left\{ (s,t) : 0 < s < \frac{16}{7}, \, \, 0 < t < \frac{8}{3}, \, \, 3.5s+1.5t-4 > 0\right\}\). Se alienta al lector a verificar que la solución presentada en 1 (a), es decir, todos los valores de resistencia iguales a\(1\), corresponde a un par\((s,t)\) en la región.
8.4.1 Ejercicios
En los Ejercicios 1 - 8, encuentra la inversa de la matriz o indica que la matriz no es invertible.
- \ (A=\ left [\ begin {array} {ll}
1 & 2\\
3 & 4
\ end {array}\ right]\) - \ (B=\ left [\ begin {array} {rr}
12 & -7\\
-5 & 3
\ end {array}\ right]\) - \ (C=\ left [\ begin {array} {rr}
6 & 15\\
14 & 35
\ end {array}\ right]\) - \ (\ text {4.} D=\ left [\ begin {array} {rr}
2 & -1\\
16 & -9
\ end {array}\ right]\) - \ (E=\ left [\ begin {array} {rrr}
3 & 0 & 4\\
2 & -1 & 3\\
-3 & 2 & -5
\ end {array}\ right]\) - \ (F=\ left [\ begin {array} {rrr}
4 & 6 & -3\\
3 & 4 & -3\\
1 & 2 & 6
\ end {array}\ derecha]\) - \ (G=\ left [\ begin {array} {rrr}
1 & 2 & 3\\
2 & 3 & 11\\
3 & 4 & 19
\ end {array}\ right]\) - \ (H=\ left [\ begin {array} {rrrr}
1 & 0 & -3 & 0\\
2 & 2 & 8 & 7\\
-5 & 0 & 16 & 0\\
1 & 0 & 4 & 1
\ end {array}\ right]\)
En los Ejercicios 9 - 11, utilice una matriz inversa para resolver los siguientes sistemas de ecuaciones lineales.
- \ (\ izquierda\ {\ comenzar {alineado}
3 x+7 y &=26\\
5 x+12 y &=39
\ end {alineado}\ derecho.\) - \ (\ left\ {\ begin {array} {rlr}
3 x+7 y & = & 0\\
5 x+12 y & = & -1
\ end {array}\ right.\) - \ (\ izquierda\ {\ comenzar {alineado}
3 x+7 y &=-7\\
5 x+12 y &=5
\ end {alineado}\ derecho.\)
En los Ejercicios 12 - 14, utilice la inversa\(E\) del Ejercicio 5 anterior para resolver los siguientes sistemas de ecuaciones lineales.
- \ (\ izquierda\ {\ comenzar {alineado}
3 x+4 z &=1\\
2 x-y+3 z &=0\\
-3 x+2 y-5 z &=0
\ end {alineado}\ derecho.\) - \ (\ izquierda\ {\ comenzar {alineado}
3 x+4 z &=0\\
2 x-y+3 z &=1\\
-3 x+2 y-5 z &=0
\ end {alineado}\ derecho.\) - \ (\ izquierda\ {\ comenzar {alineado}
3 x+4 z &=0\\
2 x-y+3 z &=0\\
-3 x+2 y-5 z &=1
\ end {alineado}\ derecho.\) - Este ejercicio es una continuación del Ejemplo 8.3.3 en la Sección 8.3 y da otra aplicación de inversión matricial. Recordemos que dada la matriz de posición\(P\) para un punto en el plano, la matriz\(RP\) corresponde a un punto girado en\(45^{\circ}\) sentido antihorario desde\(P\) donde
\ (R=\ left [\ begin {array} {cc}
\ frac {\ sqrt {2}} {2} & -\ frac {\ sqrt {2}} {2}} {2}
\\ frac {\ sqrt {2}} {2} &\ frac {\ sqrt {2}} {2}
\ end {array}\ derecha]\)- Encuentra\(R^{-1}\).
- Si\(RP\) gira un punto en sentido antihorario\(45^{\circ}\), ¿qué debe\(R^{-1} P\) hacer? Comprueba tu respuesta\(R^{-1} P\) buscando varios puntos en los ejes de coordenadas y las líneas\(y=\pm x\).
- Encuentra\(R^{-1} P\) donde\(P\) corresponde a un punto genérico\(P(x, y)\). Verifique que esto lleve los puntos de la curva\(y=\frac{2}{x}\) a los puntos de la curva\(x^{2}-y^{2}=4\).
- La dieta de un Sasquatch consiste en tres alimentos primarios: pescado ippizuti, hongos brumosos y bayas solares. Cada porción de Pescado Ippizuti es de 500 calorías, contiene 40 gramos de proteína, y no tiene Vitamina X. Cada porción de Hongos Misty es de 50 calorías, contiene 1 gramo de proteína, y 5 miligramos de Vitamina X. Finalmente, cada porción de Sun Berries es de 80 calorías, no contiene proteínas, pero tiene 15 miligramos de Vitamina X. 9
- Si un macho adulto Sasquatch requiere 3200 calorías, 130 gramos de proteína y 275 miligramos de Vitamina X al día, usa una matriz inversa para encontrar cuántas porciones cada una de Ippizuti Fish, Misty Setas y Sun Berries necesita comer cada día.
- Una hembra adulta de Sasquatch requiere 3100 calorías, 120 gramos de proteína y 300 miligramos de Vitamina X al día. Usa la matriz inversa que encontraste en la parte (a) para encontrar cuántas porciones cada una de Ippizuti Fish, Misty Setas y Sun Berries necesita comer cada día.
- Un Sasquatch adolescente requiere 5000 calorías, 400 gramos de proteína al día, pero no vitamina X diariamente. 10 Usa la matriz inversa que encontraste en la parte (a) para encontrar cuántas porciones cada una de Ippizuti Fish, Misty Setas y Sun Berries necesita comer cada día.
- Las matrices se pueden utilizar en criptografía. Supongamos que deseamos codificar el mensaje 'BIGFOOT LIVES'. Comenzamos asignando un número a cada letra del alfabeto, digamos\(A = 1\),\(B = 2\) y así sucesivamente. Reservamos 0 para actuar como espacio. De ahí que nuestro mensaje 'BIGFOOT LIVES' corresponde a la cadena de números '2, 9, 7, 6, 15, 15, 20, 0, 12, 9, 22, 5, 19'. Para codificar este mensaje, utilizamos una matriz invertible. Cualquier matriz invertible servirá, pero para este ejercicio, elegimos
\ (A=\ left [\ begin {array} {rrr}
2 & -3 & 5\\
3 & 1 & -2\\
-7 & 1 & -1 & -1
\ end {array}\ right]\)Dado que\(A\) es una matriz de 3 × 3, codificamos nuestra cadena de mensajes en una matriz\(M\) con 3 filas. Para ello, tomamos los tres primeros números, 2 9 7, y los hacemos nuestra primera columna, los siguientes tres números, 6 15 15, y los hacemos nuestra segunda columna, y así sucesivamente. Ponemos 0's para redondear la matriz.
\ (M=\ left [\ begin {array} {rrrrr}
2 & 6 & 20 & 9 & 19\\
9 & 15 & 0 & 22 & 0\\
7 & 15 & 12 & 5 & 0
\ end {array}\ derecha]\)Para codificar el mensaje, encontramos el producto\(AM\)
\ (A M=\ left [\ begin {array} {rrr}
2 & -3 & 5\\
3 & 1 & -2\\
-7 & 1 & -1
\ end {array}\ right]\ left [\ begin {array} {rrrrr}
2 & 6 & 20 & 9 & 19\\
9 & 15 & 0 & amp; 22 & 0\\
7 & 15 & 12 & 5 & 0
\ end {array}\ right] =\ left [\ begin {array} {rrrrr}
12 & 42 & 100 & -23 & 38\\
1 & 3 & 36 & 39 & 57\\
-12 & -42 & -152 & - 46 y -133
\ end {array}\ derecha]\)Entonces nuestro mensaje codificado es '12, 1, −12, 42, 3, −42, 100, 36, −152, −23, 39, −46, 38, 57, −133. ' Para decodificar este mensaje, comenzamos con esta cadena de números, construimos una matriz de mensajes como lo hicimos antes (deberíamos\(AM\) volver a obtener la matriz) y luego multiplicar por\(A^{-1}\).
- Encuentra\(A^{-1}\).
- \(A^{-1}\)Utilícelo para decodificar el mensaje y verificar que este método realmente funcione.
- Decodificar el mensaje '14, 37, −76, 128, 21, −151, 31, 65, −140'
- Elija otra matriz invertible y codifique y decodifique sus propios mensajes.
- Usando las matrices\(A\) del Ejercicio 1,\(B\) del Ejercicio 2 y\(D\) del Ejercicio 4, mostrar\(AB = D\) y\(D^{-1}=B^{-1} A^{-1}\). Es decir, demuéstralo\((A B)^{-1}=B^{-1} A^{-1}\).
- Dejar\(M\) y\(N\) ser\(n \times n\) matrices invertibles. Demuéstralo\((M N)^{-1}=N^{-1} M^{-1}\) y compara tu trabajo con el Ejercicio 31 en la Sección 5.2.
8.4.2 Respuestas
- \ (A^ {-1} =\ left [\ begin {array} {rr}
-2 & 1\\
\ frac {3} {2} & -\ frac {1} {2}
\ end {array}\ derecha]\) - \ (B^ {-1} =\ left [\ begin {array} {rr}
3 & 7\\
5 & 12
\ end {array}\ right]\) - \(C\)no es invertible
- \ (D^ {-1} =\ left [\ begin {array} {ll}
\ frac {9} {2} & -\ frac {1} {2}\\
8 & -1
\ end {array}\ derecha]\) - \ (E^ {-1} =\ left [\ begin {array} {rrr}
-1 & 8 & 4\\
1 & -3 & -1\\
1 & -6 & -3
\ end {array}\ derecha]\) - \ (F^ {-1} =\ left [\ begin {array} {rrr}
-\ frac {5} {2} &\ frac {7} {2} &\ frac {1} {2}\
\ frac {7} {4} & -\ frac {9} {4} & -\ frac {1} {4}\
-\ frac {1} {6} &\ frac {1} {6} &\ frac {1} {6}
\ end {array}\ derecha]\) - \(G\)no es invertible
- \ (H^ {-1} =\ left [\ begin {array} {rrrr}
16 & 0 & 3 & 0\\
-90 & -\ frac {1} {2} & -\ frac {35} {2} &\ frac {7} {2}\\
5 & 0 & 1 & 0 & 0\\
-36 & 0 & -7 & 1
\ end {array}\ derecha]\)
La matriz de coeficientes es\(B^{-1}\) del Ejercicio 2 anterior por lo que lo inverso que necesitamos es\(\left(B^{-1}\right)^{-1}=B\).
- \ (\ left [\ begin {array} {rr}
12 & -7\\
-5 & 3
\ end {array}\ right]\ left [\ begin {array} {l}
26\\
39
\ end {array}\ right] =\ left [\ begin {array} {r}
39\\
-13
\ end {array}\ right]\ text {Así} x=39\ text {y} y=-13\). - \ (\ left [\ begin {array} {rr}
12 & -7\\
-5 & 3
\ end {array}\ right]\ left [\ begin {array} {r} {r}
0\
\
-1\ end {array}\ right] =\ left [\ begin {array} {r}
7\\
-3
\ end {array}\ right]\ text {Así} x=7\ texto {y} y=-3\ texto {.}\) - \ (\ left [\ begin {array} {rr}
12 & -7\\
-5 & 3
\ end {array}\ right]\ left [\ begin {array} {r}
-7\\
5
\ end {array}\ right] =\ left [\ begin {array} {r}
-119\\
50
\ end {array}\ right]\ text {Así} x=-119\ text {y} y=50\).
\ (\ text {La matriz de coeficientes es} E=\ left [\ begin {array} {rrr}
3 & 0 & 4\\
2 & -1 & 3\\
-3 & 2 & -5
\ end {array}\ right]\ text {del Ejercicio 5, entonces} E^ {-1} =\ left [\ begin {array} {rrr}
-1 & 8 y 4\\
1 y -3 y -1\\
1 y -6 y -3
\ end {array}\ derecha]\)
- \ (\ left [\ begin {array} {rrr}
-1 & 8 & 4\\
1 & -3 & -1\\
1 & -6 & -3
\ end {array}\ right]\ left [\ begin {array} {l}
1\\
0\
0
\ end {array}\ right ] =\ left [\ begin {array} {r}
-1\\
1\\
1
\ end {array}\ right]\ text {Así} x=-1, y=1\ text {y} z=1\) - \ (\ left [\ begin {array} {rrr}
-1 & 8 & 4\\
1 & -3 & -1\\
1 & -6 & -3
\ end {array}\ right]\ left [\ begin {array} {l}
0\\
1\
0
\ end {array}\ right ] =\ left [\ begin {array} {r}
8\\
-3\
-6
\ end {array}\ right]\ text {Entonces} x=8, y=-3\ text {y} z=-6\ text {.}\) - \ (\ left [\ begin {array} {rrr}
-1 & 8 & 4\\
1 & -3 & -1\\
1 & -6 & -3
\ end {array}\ right]\ left [\ begin {array} {l}
0\\
0\
1
\ end {array}\ right ] =\ left [\ begin {array} {r}
4\\
-1\\
-3
\ end {array}\ right]\ text {Así} x=4, y=-1\ text {y} z=-3\).
-
- El macho adulto Sasquatch necesita: 3 porciones de Pescado Ippizuti, 10 porciones de Misty Setas y 15 porciones de Sun Berries diarias.
- La hembra adulta Sasquatch necesita: 3 porciones de Ippizuti Fish y 20 porciones de Sun Berries diarias. (¡No se necesitan hongos brumosos!)
- El adolescente Sasquatch requiere 10 porciones de Ippizuti Fish diariamente. (¡No se necesitan hongos brumosos ni bayas solares!)
-
- \ (A^ {-1} =\ left [\ begin {array} {rrr}
1 & 2 & 1\\
17 & 33 & 19\\
10 & 19 & 11
\ end {array}\ right]\) - \ (\ left [\ begin {array} {rrr}
1 & 2 & 1\\
17 & 33 & 19\\
10 & 19 & 11
\ end {array}\ right]\ left [\ begin {array} {rrrr}
12 & 42 & 100 & -23 & 38\\
1 & 3 & 36 & 39 & 57\\
-12 & -42 & -152 & -46 & -133
\ end {array}\ right] =\ left [\ begin {array} {rrrrr}
2 & 6 & 20 & 9 & 19\\
9 & 15 & 0 & 22 & 0\\
7 y 15 y 12 y 5 y 0
\ end {array}\ derecha]\ marca de verificación\) - 'REGLA DE LOGUES'
- \ (A^ {-1} =\ left [\ begin {array} {rrr}
Referencia
1 Cada número real distinto de cero\(a\) tiene una inversa multiplicativa, denotada\(a^{-1}\),, tal que\(a^{-1} \cdot a=a \cdot a^{-1}=1\).
2 Al igual que la búsqueda de Carl para encontrar a Sasquatch.
3 Dado que la multiplicación matricial no es necesariamente conmutativa, en esta etapa se trata de dos ecuaciones diferentes.
4 Si esta prueba le suena familiar, debería. Ver la discusión siguiente Teorema 5.2 en la página 380.
5 Se puede demostrar que una matriz es invertible si y sólo si cuando sirve como matriz de coeficientes para un sistema de ecuaciones, el sistema siempre es consistente independiente. Equivale a la segunda propiedad en el Teorema 8.6 donde las matrices\(B\) están restringidas a ser\(n \times 1\) matrices. Observamos que, debido a cómo se define la multiplicación de matrices, poder encontrar soluciones únicas\(AX = B\) para\(n \times 1\) matrices\(B\) le da la misma afirmación sobre la resolución de tales ecuaciones para\(n \times r\) matrices − ya que podemos encontrar una solución única para ellas una columna a la vez.
6 Tenga en cuenta que la solución es la primera columna de la\(A^{-1}\). Se anima al lector a meditar sobre esta 'coincidencia'.
7 Los autores desean agradecer a Don Anthan, de Lakeland Community College, el diseño de este ejemplo.
8 Véase la Sección 2.4 para una revisión de este procedimiento.
9 Misty Setas y Sun Berries son las únicas fuentes ficticias conocidas de Vitamina X.
10 La vitamina X es necesaria para mantener la longevidad de Sasquatch solamente.