
12.6: Transductores de Instrumentación de CA
- Page ID
- 153218

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Así como se han hecho dispositivos para medir ciertas cantidades físicas y repetir esa información en forma de señales eléctricas de CC (termopares, galgas extensométricas, sondas de pH, etc.), se han fabricado dispositivos especiales que hacen lo mismo con la CA.
A menudo es necesario poder detectar y transmitir la posición física de las piezas mecánicas a través de señales eléctricas. Esto es especialmente cierto en los campos del control automatizado de máquinas herramienta y la robótica. Una manera simple y fácil de hacer esto es con un potenciómetro: (Figura abajo)
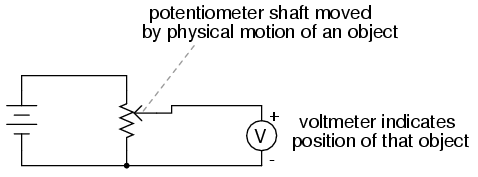
El voltaje de toma del potenciómetro indica la posición de un objeto esclavizado al eje.
Sin embargo, los potenciómetros tienen sus propios problemas únicos. Por un lado, se basan en el contacto físico entre el “limpiaparabrisas” y la tira de resistencia, lo que significa que sufren los efectos del desgaste físico a lo largo del tiempo. A medida que los potenciómetros se desgastan, su salida proporcional frente a la posición del eje se vuelve cada vez menos segura. Es posible que ya hayas experimentado este efecto al ajustar el control de volumen en una radio vieja: al girar la perilla, es posible que escuches sonidos de “rascado” que salen de los altavoces. Esos ruidos son el resultado de un mal contacto del limpiaparabrisas en el potenciómetro de control de volumen.
Además, este contacto físico entre el limpiaparabrisas y la tira crea la posibilidad de que se formen arcos (chispas) entre los dos a medida que se mueve el limpiaparabrisas. Con la mayoría de los circuitos del potenciómetro, la corriente es tan baja que el arco del limpiaparabrisas es insignificante, pero es una posibilidad a considerar. Si el potenciómetro se va a operar en un ambiente donde haya vapor o polvo combustible, ¡este potencial de formación de arco se traduce en un potencial de explosión!
Usando CA en lugar de CC, podemos evitar completamente el contacto deslizante entre las piezas si usamos un transformador variable en lugar de un potenciómetro. Los dispositivos fabricados para este propósito se denominan LVDT's, que significa Transformers T iferenciales D ariables L inear V. El diseño de un LVDT se ve así: (Figura abajo)
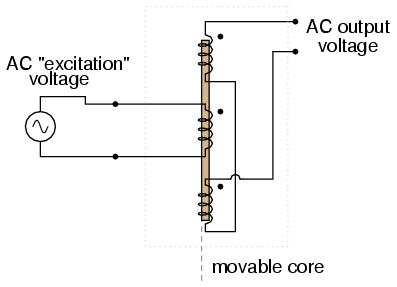
La salida de CA del transformador diferencial variable lineal (LVDT) indica la posición del núcleo.
Obviamente, este dispositivo es un transformador: tiene un solo devanado primario alimentado por una fuente externa de voltaje de CA, y dos devanados secundarios conectados en serie. Es variable porque el núcleo es libre de moverse entre los devanados. Es diferencial por la forma en que se conectan los dos devanados secundarios. Estar dispuestos para oponerse entre sí (180 o desfasados) significa que la salida de este dispositivo será la diferencia entre la salida de voltaje de los dos devanados secundarios. Cuando el núcleo está centrado y ambos devanados están emitiendo el mismo voltaje, el resultado neto en los terminales de salida será de cero voltios. Se llama lineal porque la libertad de movimiento del núcleo es de línea recta.
La salida de voltaje de CA por un LVDT indica la posición del núcleo móvil. Cero voltios significa que el núcleo está centrado. Cuanto más lejos esté el núcleo de la posición central, mayor porcentaje de voltaje de entrada (“excitación”) se verá en la salida. La fase de la tensión de salida en relación con la tensión de excitación indica en qué dirección desde el centro está desplazado el núcleo.
La principal ventaja de un LVDT sobre un potenciómetro para la detección de posición es la ausencia de contacto físico entre las partes móviles y estacionarias. El núcleo no entra en contacto con los devanados del cable, sino que se desliza dentro y fuera dentro de un tubo no conductor. Así, el LVDT no se “desgasta” como un potenciómetro, ni existe la posibilidad de crear un arco.
La excitación del LVDT es típicamente de 10 voltios RMS o menos, a frecuencias que van desde la línea eléctrica hasta el rango de audio alto (20 kHz). Una desventaja potencial del LVDT es su tiempo de respuesta, el cual depende principalmente de la frecuencia de la fuente de voltaje de CA. Si se desean tiempos de respuesta muy rápidos, la frecuencia debe ser mayor para permitir cualquier circuito de detección de voltaje suficientes ciclos de CA para determinar el nivel de voltaje a medida que se mueve el núcleo. Para ilustrar el problema potencial aquí, imagine este escenario exagerado: un LVDT alimentado por una fuente de voltaje de 60 Hz, con el núcleo moviéndose dentro y fuera cientos de veces por segundo. ¡La salida de este LVDT ni siquiera parecería una onda sinusoidal porque el núcleo se movería a lo largo de su rango de movimiento antes de que el voltaje de la fuente de CA pudiera completar un solo ciclo! Sería casi imposible determinar la posición instantánea del núcleo si se mueve más rápido que la tensión instantánea de la fuente.
Una variación en el LVDT es el RVDT, o R otario V ariable D ifferencial T ransformer. Este dispositivo funciona casi con el mismo principio, excepto que el núcleo gira sobre un eje en lugar de moverse en línea recta. Los RVDT se pueden construir para un movimiento limitado de movimiento de 360 o (círculo completo).
Siguiendo con este principio, tenemos lo que se conoce como Synchro o Selsyn, que es un dispositivo construido muy parecido a un motor o generador de CA polifásico de rotor herido. El rotor es libre de girar 360 o completo, al igual que un motor. En el rotor hay un solo devanado conectado a una fuente de voltaje de CA, al igual que el devanado primario de un LVDT. Los devanados del estator suelen ser en forma de Y trifásica, aunque se han construido sincronizadores con más de tres fases. (Figura abajo) Un dispositivo con un estator bifásico se conoce como un resolvedor. Un resolvedor produce salidas de seno y coseno que indican la posición del eje.
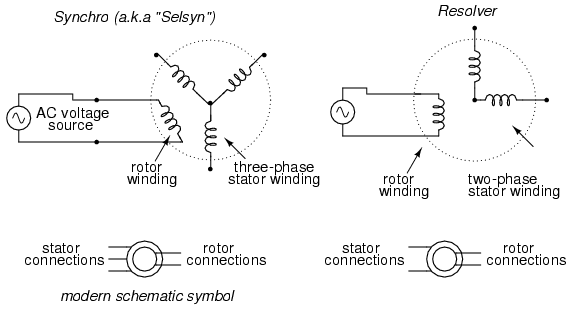
Un sincro se enrolla con un devanado de estator trifásico y un campo giratorio. Un resolvedor tiene un estator bifásico.
Los voltajes inducidos en los devanados del estator a partir de la excitación de CA del rotor no están desplazados de fase en 120 o como en un generador trifásico real. Si el rotor estuviera energizado con corriente CC en lugar de CA y el eje girara continuamente, entonces los voltajes serían verdaderos trifásicos. Pero no es así como se diseña un sincro para ser operado. Más bien, este es un dispositivo de detección de posición muy parecido a un RVDT, excepto que su señal de salida es mucho más definida. Con el rotor energizado por CA, los voltajes del devanado del estator serán proporcionales en magnitud a la posición angular del rotor, de fase ya sea 0 o 180 o desplazados, como un LVDT o RVDT regular. Se podría pensar en ello como un transformador con un devanado primario y tres devanados secundarios, cada devanado secundario orientado en un ángulo único. A medida que el rotor se gira lentamente, cada devanado a su vez se alineará directamente con el rotor, produciendo voltaje completo, mientras que los otros devanados producirán algo menos que voltaje completo.
Los sincros se utilizan a menudo en pares. Con sus rotores conectados en paralelo y energizados por la misma fuente de voltaje de CA, sus ejes coincidirán con la posición con un alto grado de precisión: (Figura a continuación)
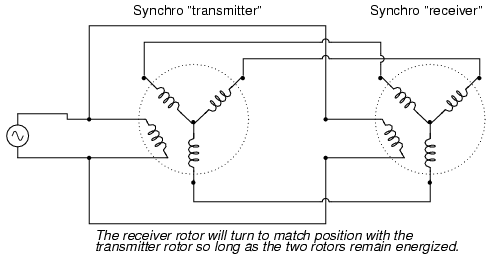
Los ejes de sincronización son esclavos entre sí. Girar uno mueve al otro.
Dichos pares de “transmisor/receptor” se han utilizado en barcos para retransmitir la posición del timón, o para retransmitir la posición del giroscopio de navegación a distancias bastante largas. La única diferencia entre el “transmisor” y el “receptor” es cuál es girado por una fuerza externa. El “receptor” se puede usar con la misma facilidad que el “transmisor” al forzar su eje a girar y dejar que el sincronismo en la posición izquierda coincida.
Si el rotor del receptor se deja sin alimentación, actuará como detector de errores de posición, generando una tensión de CA en el rotor si el eje es algo que no sea 90 o 270 o desplazado de la posición del eje del transmisor. El rotor del receptor ya no generará ningún par y, en consecuencia, ya no coincidirá automáticamente con la posición del transmisor: (Figura a continuación)
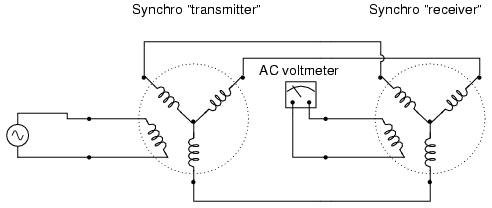
El voltímetro de CA registra el voltaje si el rotor del receptor no gira exactamente 90 o 270 grados del rotor del transmisor.
Esto puede pensarse casi como una especie de circuito puente que logra el equilibrio solo si el eje receptor se lleva a una de dos posiciones (coincidentes) con el eje del transmisor.
Una aplicación bastante ingeniosa del sincronizado es en la creación de un dispositivo de cambio de fase, siempre que el estator esté energizado por CA trifásica: (Figura a continuación)
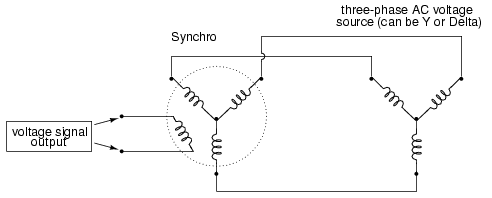
La rotación completa del rotor desplazará suavemente la fase de 0 o hasta 360 o (de nuevo a 0 o).
A medida que se gira el rotor del sincronizador, la bobina del rotor se alineará progresivamente con cada bobina del estator, estando sus respectivos campos magnéticos 120 o desfasados entre sí. Entre esas posiciones, estos campos desfasados se mezclarán para producir un voltaje del rotor en algún lugar entre 0 o, 120 o o 240 o cambio. El resultado práctico es un dispositivo capaz de proporcionar una tensión de CA de fase infinitamente variable con la torsión de una perilla (unida al eje del rotor).
Un sincro o un resolvedor pueden medir el movimiento lineal si están engranados con un mecanismo de cremallera y piñón. Un movimiento lineal de unas pocas pulgadas (o cm) que resulta en múltiples revoluciones del sincro (resolvedor) genera un tren de ondas sinusoidales. Un Inductosyn® es una versión lineal del resolvedor. Emite señales como un resolvedor; aunque, tiene un ligero parecido.
El Inductosyn consta de dos partes: un devanado serpenteante fijo que tiene un paso de 0.1 pulg o 2 mm, y un devanado móvil conocido como deslizador. (Figura abajo) El deslizador tiene un par de devanados que tienen el mismo paso que el devanado fijo. Los devanados del deslizador están desplazados por un cuarto de paso, por lo que tanto las ondas sinusoidales como las coseno se producen por movimiento Un devanado deslizante es adecuado para contar pulsos, pero no proporciona información de dirección. Los devanados bifásicos proporcionan información de dirección en la fase de las ondas sinusoidales y cosenoidales. El movimiento por un paso produce un ciclo de ondas sinusoidales y cosenoidales; múltiples tonos producen un tren de ondas.
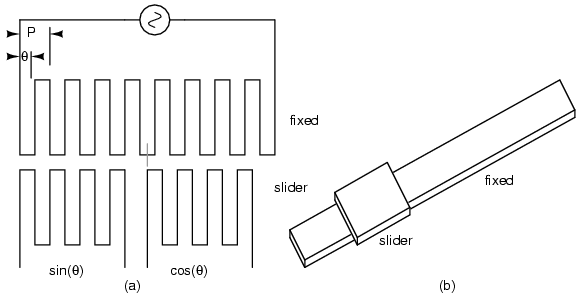
Inductosyn: (a) Bobinado serpentino fijo, (b) devanados bifásicos con deslizador móvil. Adaptado de la Figura 6.16
Cuando decimos que las ondas sinusoidales y coseno son produce en función del movimiento lineal, realmente queremos decir que una portadora de alta frecuencia es modulada en amplitud a medida que se mueve el deslizador. Las dos señales de CA del deslizador deben medirse para determinar la posición dentro de un tono, la posición fina. ¿Cuántos lanzamientos ha movido el control deslizante? La relación de las señales sinusoidales y cosenales no lo revela. Sin embargo, el número de pasos (número de ondas) se puede contar desde un punto de partida conocido produciendo una posición aproximada. Este es un codificador incremental. Si se debe conocer la posición absoluta independientemente del punto de partida, un resolvedor auxiliar orientado para una revolución por longitud da una posición aproximada. Esto constituye un codificador absoluto.
Una inductosina lineal tiene una relación de transformador de 100:1. Compare esto con la relación 1:1 para un solucionador. Unos pocos voltios de excitación de CA en un Inductosyn produce unos pocos milivoltios de salida. Este nivel de señal bajo se convierte a un formato digital de 12 bits mediante un convertidor de resolución a digital (RDC). La resolución de 25 micropulgadas es alcanzable.
También hay una versión rotativa del Inductosyn que tiene 360 pasos de patrón por revolución. Cuando se usa con un convertidor de resolución a digital de 12 bits, mejor que se puede lograr una resolución de 1 segundo de arco. Este es un codificador incremental. El conteo de tonos desde un punto de partida conocido es necesario para determinar la posición absoluta. Alternativamente, un resolvedor puede determinar la posición absoluta gruesa.
Hasta el momento los transductores discutidos han sido todos de la variedad inductiva. Sin embargo, es posible hacer transductores que operen también con capacitancia variable, utilizándose CA para detectar el cambio de capacitancia y generar un voltaje de salida variable.
Recuerde que la capacitancia entre dos superficies conductoras varía con tres factores principales: el área de superposición de esas dos superficies, la distancia entre ellas y la constante dieléctrica del material entre las superficies. Si dos de cada tres de estas variables pueden ser fijas (estabilizadas) y la tercera puede variar, entonces cualquier medición de capacitancia entre las superficies será únicamente indicativa de cambios en esa tercera variable.
Los investigadores médicos han hecho uso durante mucho tiempo de la detección capacitiva para detectar cambios fisiológicos en los cuerpos vivos. Ya en 1907, un investigador alemán llamado H. Cremer colocó dos placas metálicas a cada lado de un corazón de rana palpitante y midió los cambios de capacitancia resultantes de que el corazón se llenara y vaciara alternativamente de sangre. Se han realizado mediciones similares en seres humanos con placas metálicas colocadas en el pecho y la espalda, registrando la acción respiratoria y cardíaca mediante cambios de capacitancia. Para mediciones capacitivas más precisas de la actividad orgánica, se han insertado sondas metálicas en órganos (especialmente el corazón) en las puntas de los tubos de catéter, mediéndose la capacitancia entre la sonda metálica y el cuerpo del sujeto. Con una frecuencia de excitación de CA suficientemente alta y un detector de voltaje suficientemente sensible, no solo la acción de bombeo sino también los sonidos del corazón activo pueden interpretarse fácilmente.
Al igual que los transductores inductivos, los transductores capacitivos también pueden fabricarse para que sean unidades autónomas, a diferencia de los ejemplos fisiológicos directos descritos anteriormente. Algunos transductores funcionan haciendo que una de las placas del condensador sea móvil, ya sea de tal manera que varíe el área de superposición o la distancia entre las placas. Otros transductores funcionan moviendo un material dieléctrico dentro y fuera entre dos placas fijas: (Figura abajo)
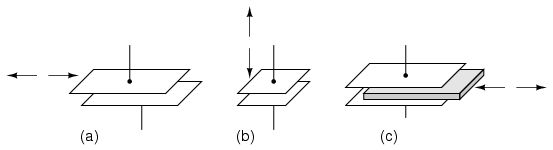
El transductor capacitivo variable varía; (a) área de superposición, (b) distancia entre placas, (c) cantidad de dieléctrico entre placas.
Transductores con mayor sensibilidad e inmunidad a cambios en otras variables se pueden obtener por medio de diseño diferencial, al igual que el concepto detrás del LVDT (Transformador Diferencial Variable Lineal). Aquí hay algunos ejemplos de transductores capacitivos diferenciales: (Figura a continuación)

El transductor capacitivo diferencial varía la relación de capacitancia cambiando: (a) área de superposición, (b) distancia entre placas, (c) dieléctrico entre placas.
Como puede ver, todos los dispositivos diferenciales mostrados en la ilustración anterior tienen tres conexiones de cable en lugar de dos: un cable para cada una de las placas “finales” y otro para la placa “común”. A medida que cambia la capacitancia entre una de las placas “finales” y la placa “común”, la capacitancia entre la otra placa “final” y la placa “común” es tal que cambia en la dirección opuesta. Este tipo de transductor se presta muy bien a la implementación en un circuito puente: (Figura abajo)
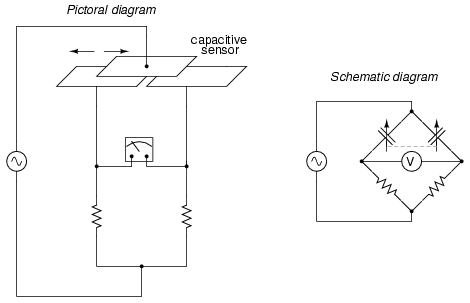
Circuito de medición de puente de transductor capacitivo diferencial.
Los transductores capacitivos proporcionan capacitancias relativamente pequeñas para que funcione un circuito de medición, típicamente en el rango de pico faradios. Debido a esto, altas frecuencias de suministro de energía (¡en el rango de megahercios!) se requieren generalmente para reducir estas reactancias capacitivas a niveles razonables. Dadas las pequeñas capacitancias proporcionadas por los transductores capacitivos típicos, las capacitancias parásitas tienen el potencial de ser las principales fuentes de error de medición. ¡Un buen blindaje del conductor es esencial para un circuito de transductor capacitivo confiable y preciso!
El circuito puente no es la única manera de interpretar efectivamente la salida de capacitancia diferencial de dicho transductor, sino que es una de las más simples de implementar y comprender. Al igual que con el LVDT, la salida de voltaje del puente es proporcional al desplazamiento de la acción del transductor desde su posición central, y la dirección de desplazamiento se indicará mediante desplazamiento de fase. Este tipo de circuito puente es similar en función al tipo utilizado con los medidores de deformación: no se pretende que esté en una condición “equilibrada” todo el tiempo, sino que el grado de desequilibrio representa la magnitud de la cantidad que se mide.
Una alternativa interesante al circuito puente para interpretar la capacitancia diferencial es el Twin-T. Requiere el uso de diodos, aquellas “válvulas unidireccionales” para corriente eléctrica mencionadas anteriormente en el capítulo: (Figura abajo)
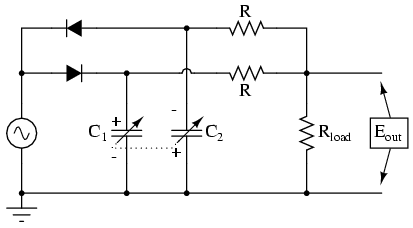
Transductor capacitivo diferencial circuito de medición “Twin-T”.
Este circuito podría entenderse mejor si se vuelve a dibujar para parecerse más a una configuración de puente: (Figura a continuación)
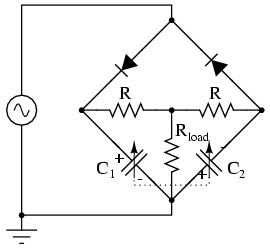
Transductor de condensador diferencial “Twin-T” circuito de medición redibujado como un puente.La salida es a través de la carga R.
El condensador C1 es cargado por la fuente de voltaje de CA durante cada semiciclo positivo (positivo medido en referencia al punto de tierra), mientras que C 2 se carga durante cada semiciclo negativo. Mientras se está cargando un condensador, el otro condensador se descarga (a una velocidad más lenta que la que se cargó) a través de la red de tres resistencias. Como consecuencia, C1 mantiene un voltaje de CC positivo con respecto a tierra, y C 2 un voltaje de CC negativo con respecto a tierra.
Si el transductor capacitivo se desplaza de la posición central, un condensador aumentará en capacitancia mientras que el otro disminuirá. Esto tiene poco efecto en la carga de voltaje pico de cada condensador, ya que hay una resistencia insignificante en la trayectoria de corriente de carga de la fuente al condensador, lo que resulta en una constante de tiempo muy corta (τ). Sin embargo, cuando llega el momento de descargar a través de las resistencias, el condensador con el mayor valor de capacitancia mantendrá su carga por más tiempo, lo que resulta en un mayor voltaje de CC promedio a lo largo del tiempo que el condensador de menor valor.
La resistencia de carga (carga R), conectada en un extremo al punto entre las dos resistencias de igual valor (R) y en el otro extremo a tierra, no caerá voltaje de CC si las cargas de voltaje de CC de los dos condensadores son iguales en magnitud. Si, por otro lado, un condensador mantiene una carga de voltaje de CC mayor que el otro debido a una diferencia en la capacitancia, la resistencia de carga caerá un voltaje proporcional a la diferencia entre estos voltajes. Por lo tanto, la capacitancia diferencial se traduce en una tensión de CC a través de la resistencia de carga.
A través de la resistencia de carga, hay voltaje de CA y CC presente, siendo solo el voltaje de CC significativo para la diferencia de capacitancia. Si se desea, se puede agregar un filtro de paso bajo a la salida de este circuito para bloquear la CA, dejando solo una señal de CC para ser interpretada por los circuitos de medición: (Figura a continuación)
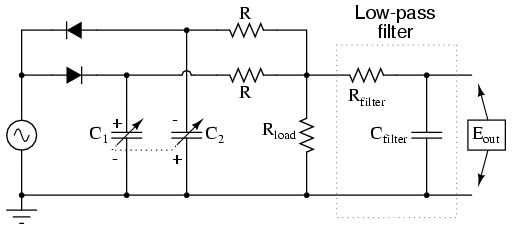
La adición de filtro de paso bajo a “Twin-T” alimenta CC pura al indicador de medición.
Como circuito de medición para sensores capacitivos diferenciales, la configuración Twin-T disfruta de muchas ventajas sobre la configuración de puente estándar. En primer lugar, el desplazamiento del transductor se indica mediante una simple tensión de CC, no una tensión de CA cuya magnitud y fase deben interpretarse para indicar qué capacitancia es mayor. Además, dados los valores adecuados de los componentes y la salida de la fuente de alimentación, esta señal de salida de CC puede ser lo suficientemente fuerte como para accionar directamente un movimiento de medidor electromecánico, eliminando la necesidad de un circuito amplificador. Otra ventaja importante es que todos los elementos importantes del circuito tienen un terminal conectado directamente a tierra: la fuente, la resistencia de carga y ambos condensadores están referenciados a tierra. Esto ayuda a minimizar los efectos nocivos de la capacitancia parásita que comúnmente afecta a los circuitos de medición de puentes, eliminando así mismo la necesidad de medidas compensatorias como la tierra Wagner.
Este circuito también es fácil de especificar piezas para. Normalmente, un circuito de medición que incorpora diodos complementarios requiere la selección de diodos “emparejados” para una buena precisión. ¡No es así con este circuito! Siempre y cuando el voltaje de la fuente de alimentación sea significativamente mayor que la desviación en la caída de voltaje entre los dos diodos, los efectos del desajuste son mínimos y contribuyen poco al error de medición. Además, las variaciones de frecuencia de suministro tienen un impacto relativamente bajo en la ganancia (cuánta tensión de salida se desarrolla para una cantidad dada de desplazamiento del transductor), y la tensión de alimentación de onda cuadrada funciona así como la onda sinusoidal, suponiendo un ciclo de trabajo del 50% (igual a medio ciclo positivo y negativo), por supuesto.