
10.3: Superficie que genera el flujo
- Page ID
- 52877

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Piense en formas sobre las que un mármol podría permanecer estacionario, posiblemente equilibrado precariamente, sobre una complicada superficie bidimensional en espacio tridimensional, con picos y valles en su estructura. La figura\(\PageIndex{1}\) muestra siete configuraciones posibles para permanecer estacionario.
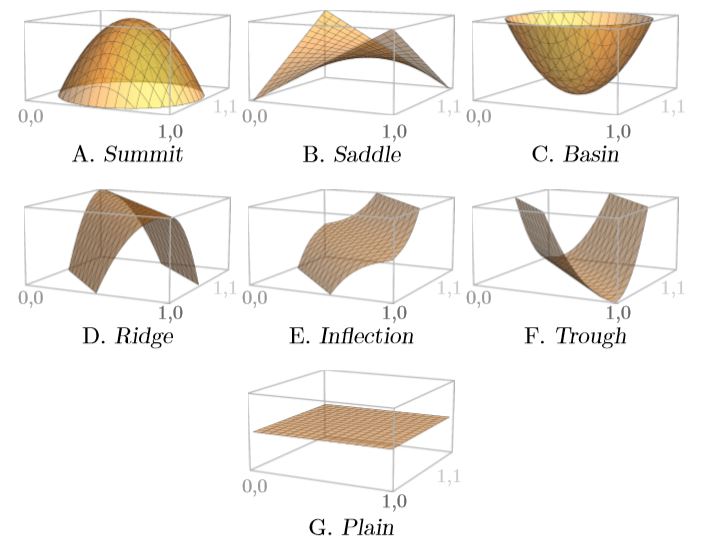
La configuración A es una cumbre, un punto alto con respecto a su entorno. Se curva hacia abajo en todas las direcciones. Por lo tanto, es inestable: el mármol encaramado en la parte superior puede rodar en cualquier dirección.
La configuración C es lo contrario, una cuenca. La superficie se curva hacia arriba en todas las direcciones. Es estable porque un mármol que descansa en la parte inferior rueda hacia atrás de una perturbación en cualquier dirección.
La configuración B es como una combinación de A y C. Se llama “silla de montar” por su forma alguna vez ubicua (derecha). Se curva hacia arriba en algunas direcciones y hacia abajo en otras. Un mármol que descansa en su centro es inestable porque puede rodar en muchas direcciones.
su forma alguna vez ubicua (derecha). Se curva hacia arriba en algunas direcciones y hacia abajo en otras. Un mármol que descansa en su centro es inestable porque puede rodar en muchas direcciones.
Las configuraciones D, E y F están relacionadas con A, B y C, pero están niveladas en al menos una dirección. Una “cresta”, Configuración D, tiene equilibrios a lo largo de su parte superior. Un mármol equilibrado precariamente allí y empujado podría posiblemente moverse a un nuevo equilibrio a lo largo de la cresta, si el empujón estuviera alineado con una exactitud infinita; casi seguro, sin embargo, el mármol rodaría. Esta configuración tiene un número infinito de equilibrios, a lo largo de la cresta, pero ninguno de ellos es estable.
Una “depresión”, Configuración F, es lo opuesto a una cresta, con equilibrios a lo largo de sus niveles más bajos. Una canica descansando ahí y codazada se moverá a una nueva posición de equilibrio en la base del abrevadero. Nuevamente hay un número infinito de equilibrios, a lo largo de toda la base, pero ninguno es estable porque, empujado a lo largo del canal, el mármol no regresa a su ubicación anterior. Los equilibrios son neutralmente estables, sin embargo, en la visión ecológica.
Una “inflección”, Configuración E, es como una combinación de D y F, cambiando la pendiente y volviéndose nivelada, pero luego retomando la misma dirección que antes y no cambiando a la pendiente opuesta. También tiene una línea nivelada con un número infinito de equilibrios, todos inestables, con canicas rodando lejos del más mínimo empujón en la mitad de las direcciones posibles.
La configuración G, una “llanura” perfectamente plana, es quizás más fácil de entender. Un mármol puede descansar en cualquier lugar, por lo que cada punto de la superficie plana es un equilibrio. Pero un mármol no volverá a su posición anterior si se le da un golpe, por lo que ningún equilibrio en la superficie plana es estable. En ecología esta situación a veces se le llama “neutralmente estable”; en matemáticas se llama “inestable”.
Con imágenes tridimensionales y poder cognitivo humano, es posible visualizar una superficie de un vistazo, como en la Figura 10.1.1, y juzgar las implicaciones para las poblaciones que crecen de acuerdo con ecuaciones que corresponden a esa superficie. Se puede ver de un vistazo si se está curvando hacia arriba en todas partes o hacia abajo en todas partes, si combina direcciones ascendente y descendente, o si tiene puntos nivelados. Se puede clasificar cada equilibrio en las configuraciones de Figura\(\PageIndex{1}\). Pero, ¿cómo puede cuantificarse ese juicio, hacerse automático?
El método de vectores propios y valores propios logra esto. Piense en el prefijo eigen, como que significa “apropiado”, como en “vector apropiado” o “valor apropiado”. La idea quedará clara en breve. El método de vectores propios y valores propios fue desarrollado por etapas a lo largo de más de dos siglos por algunas de las mejores mentes matemáticas, y ahora podemos aplicarlo intacto a la ecología.
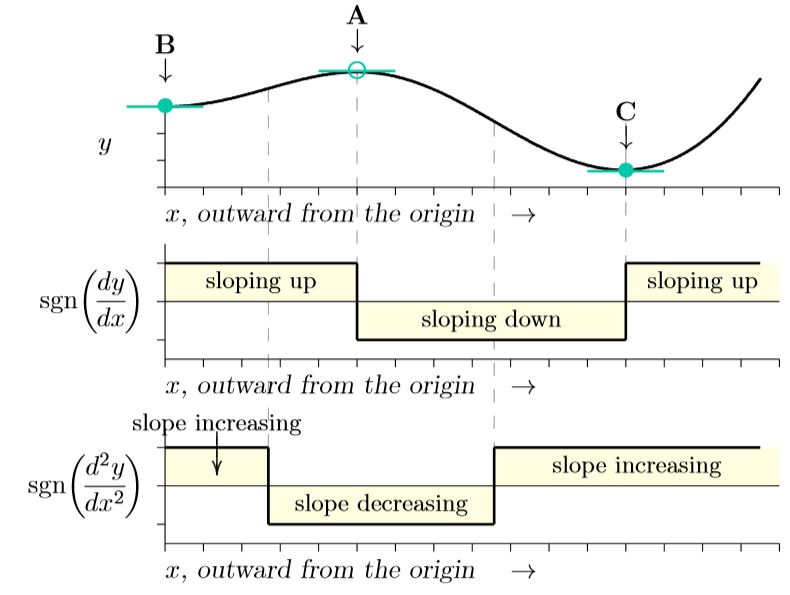
Piense en un corte unidimensional a través de la superficie de la Figura 10.1.1, pasando sucesivamente por los puntos B, A, C y más allá. Parecería la parte superior de la Figura\(\PageIndex{2}\) Como antes, un mármol equilibrado precisamente en A sería inestable, listo para rodar ya sea hacia B o C. Los puntos de equilibrio son puntos de nivel donde la pendiente es cero, ya que están en la superficie de la Figura 10.1.1 Del cálculo, aquí es donde la derivada es cero, donde dy/dx = 0. Esas pendientes de cero están marcadas por líneas horizontales verdes en la figura.
La gráfica media de la Figura\(\PageIndex{2}\) muestra el signo de la derivada, dy/dx, más o menos. La función sign en el eje vertical, sgn (u), es igual a cero si u es cero pero es igual a más o menos uno si u es positivo o negativo, respectivamente. Si un equilibrio está en una depresión o en una cumbre está determinado por cómo la pendiente está cambiando exactamente en el punto de equilibrio. A partir del cálculo, esa es la segunda derivada,\(\frac{d^2y}{dx^2}\), registrando cambios en la primera derivada, dy/dx —así como la primera derivada registra cambios en la propia superficie.
El signo de la segunda derivada se muestra en la parte inferior de la Figura\(\PageIndex{2}\). Dondequiera que la pendiente esté aumentando en un punto de equilibrio, es decir, pasando de inclinarse hacia abajo a la izquierda a inclinarse hacia arriba a la derecha, es decir, una cuenca. Dondequiera que esté disminuyendo en un punto de equilibrio, pasando de inclinarse hacia arriba a la izquierda a inclinarse hacia abajo a la derecha, eso es una cumbre. ¡Si un punto de equilibrio es estable o no puede determinarse matemáticamente simplemente a partir del signo de la segunda derivada de superficie en ese punto!
Esto es fácil si solo hay una especie, como en los modelos de capítulos anteriores, con una sola dirección a considerar. Pero se vuelve complicado cuando dos o más especies interactúan, ya que se dispone de un número infinito de direcciones.
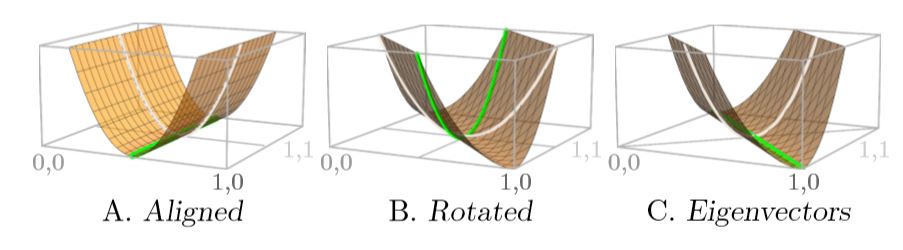
Podría parecer que una configuración será una cuenca si la superficie se curva hacia arriba tanto en la dirección x como en y, como en la Configuración C de la Figura\(\PageIndex{1}\). Pero échale un vistazo a las tres partes de Figura\(\PageIndex{3}\). La parte A es una superficie con un canal alineado con los ejes.
Mirando a lo largo del eje x, que sería el eje N 1 mostrando la abundancia de la Especie 1, la superficie se curva hacia arriba en ambos lados de su mínimo (curva blanca). Sin embargo, mirar a lo largo del eje y —el eje N 2 que muestra la abundancia de la Especie 2— revela que está exactamente nivelado en esa dirección (línea verde), lo que significa que el equilibrio no es estable.
Pero supongamos que la misma superficie se gira 45 grados, como en la parte B de la figura. La superficie se curva hacia arriba no solo a lo largo del eje x (curva blanca) sino también a lo largo del eje y (curva verde). Sin embargo, la superficie es la misma. Contrario a lo que se podría haber esperado, curvarse hacia arriba tanto en la dirección x como en y no significa que la configuración sea una cuenca! Comprender la estructura significa mirar en las direcciones adecuadas a lo largo de la superficie, no simplemente a lo largo de los ejes.
Esto es lo que hacen los valores propios y los vectores propios. Se alinean con los ejes “apropiados” para la superficie, como se ilustra en la parte C. No importa cuán retorcida, sesgada o reescalada esté la superficie con respecto a los ejes, los vectores propios se alinean con los ejes “apropiados” de la superficie, y los valores propios miden si la pendiente está aumentando o disminuyendo a lo largo de esos ejes en un equilibrio.
Caja\(\PageIndex{1}\) rules of eigenvalues for hill-climbing systems
- Si todos los valores propios son negativos, el equilibrio es estable.
- Si algún valor propio es positivo, el equilibrio es inestable.
- Si algunos o todos los valores propios son cero y los valores propios restantes son negativos, no hay suficiente información en los valores propios para saber si el equilibrio es estable o no. Se necesita una mirada más profunda al sistema.
En definitiva, si todos los valores propios son positivos, el equilibrio es una cuenca, como en las Figuras 10.1.1C y\(\PageIndex{1}\) C. Si todos los valores propios son negativos, el equilibrio es una cumbre, como en las Figuras 10.1.1A y\(\PageIndex{1}\) A. Y si los valores propios son de signos mixtos, o si algunos son cero, entonces obtenemos uno de los otros configuraciones. (Ver Cuadro\(\PageIndex{1}\))
 la influencia de la gravedad. Los sistemas dinámicos pueden hacer lo contrario: pueden subir al nivel más alto de la localidad. Por ejemplo, la selección natural se describe comúnmente como escalar “picos de fitness” en “paisajes adaptativos” abstractos. Por supuesto, para superficies matemáticas en lugar de cordilleras reales, esto es solo un punto de vista. Si un sistema sube o se desliza hacia abajo depende arbitrariamente de si la superficie matemática está fijada con un signo más o un signo menos en las ecuaciones.
la influencia de la gravedad. Los sistemas dinámicos pueden hacer lo contrario: pueden subir al nivel más alto de la localidad. Por ejemplo, la selección natural se describe comúnmente como escalar “picos de fitness” en “paisajes adaptativos” abstractos. Por supuesto, para superficies matemáticas en lugar de cordilleras reales, esto es solo un punto de vista. Si un sistema sube o se desliza hacia abajo depende arbitrariamente de si la superficie matemática está fijada con un signo más o un signo menos en las ecuaciones.Resulta que los ejes adecuados en cada punto de equilibrio —los vectores propios— se pueden determinar exactamente a partir de solo cuatro números, y cuánto aumenta o disminuye la pendiente en cada punto de equilibrio, los valores propios, se pueden determinar al mismo tiempo a partir de los mismos cuatro números. Estas son las cuatro derivadas parciales en lo que se denomina la “matriz hessiana” de la superficie, o, de manera equivalente en la “matriz jacobiana” de las ecuaciones de crecimiento poblacional. La comprensión de estas matrices y sus aplicaciones se ha desarrollado en matemáticas en los últimos dos siglos.
exactamente a partir de solo cuatro números, y cuánto aumenta o disminuye la pendiente en cada punto de equilibrio, los valores propios, se pueden determinar al mismo tiempo a partir de los mismos cuatro números. Estas son las cuatro derivadas parciales en lo que se denomina la “matriz hessiana” de la superficie, o, de manera equivalente en la “matriz jacobiana” de las ecuaciones de crecimiento poblacional. La comprensión de estas matrices y sus aplicaciones se ha desarrollado en matemáticas en los últimos dos siglos.
Al dedicar algo de esfuerzo y atención puedes trabajar matemáticamente los valores propios con lápiz y papel. Sin embargo, es probable que emplee computadoras para evaluar los valores propios de los sistemas ecológicos. Esto se puede hacer con símbolos abstractos en paquetes informáticos como Mathematica o Maxima, o numéricamente en lenguajes de programación como R. Para los sistemas estándar de dos especies, hemos elaborado todos los equilibrios y sus correspondientes valores propios. Estos se registran en Tabla\(\PageIndex{1}\) en notación matemática y en Programa\(\PageIndex{1}\) como código, e identifican los equilibrios y estabilidad para todos los sistemas de depredación, mutualismo y competencia representados por las fórmulas de dos especies, que se copia en la tabla para referencia.
Mesa\(\PageIndex{1}\). Fórmulas de dos especies
| Ubicación | Equilibrio | Valores propios |
|
Origen (Ambas especies extintas) |
(0,0) | \((\,r_1,\,r_2)\) |
|
Eje horizontal (Especie 1 a K 1) |
\(-\frac{r_1}{s_{1,1}}\,\,0\) | \(-r_1,\,\frac{q}{s_{1,1}}\,)\) |
|
Eje vertical (Especie 2 a K 2) |
\(0,\,-\frac{r_2}{s_{2,2}}\) | \(-r_2\,\frac{p}{s_{2,2}}\) |
|
Interior (Convivencia) |
\(\frac{p}{a}\,,\,\frac{q}{a}\) | \(\frac{-b\pm\sqrt{b^2-4ac}}{2a}\) |
con
a = s 1,2 s 2,1 − s 1,1 s 2,2
b = r 1 s 2,2 (s 2,1 −s 1,1) + r 2 s 1,1 (s 1,2 −s 2,2)
c = −pq
p = r 1 s 2,2 −r 2 s 1,2
q = r 2 s 1,1 −r 1 s 2,1
en las ecuaciones ecológicas para dos especies que interactúan,
\(\frac{1}{N_1}\,\frac{dN_1}{dt}\,=\,r_1\,+\,s_{1,1}N_1\,+\,s_{1,2}N_2\)
\(\frac{1}{N_2}\,\frac{dN_2}{dt}\,=\,r_2\,+\,s_{2,2}N_1\,+\,s_{2,1}N_1\)
donde
N 1, N 2 son abundancias poblacionales de las especies 1 y 2
r 1, r 2 son tasas de crecimiento intrínsecas
s 1,1, s 2,2 miden los efectos de las especies sobre sí mismas
s 1,2, s 2,1 medir efectos entre especies
p = r1*s22 -r2*s12; # Calcular sub útil
q = r2*s11 -r1*s21; # fórmulas.
a = s12*s21 -s11*s22;
b = r1*s22* (s21-s11) +r2*s11* (s12-s22);
c = -p*q; # Calcular los equilibrios.
x00=0; y00=0; # (en el origen)
x10=-r1/s11; y10=0; # (en el eje x)
x01=0; y01=-r2/s22; # (en el eje y)
x11=p/a; y11=q/a; # (en el interior)
v00= r1; w00=r2; # Calcular el correspondiente
v10=-r1; w10=q/s11; # cuatro pares de valores propios
v01=-r2; w01=p/s22; # (solo parte real).
v11 =( -b-sqrt (b^2-4*a*c))/(2*a);
w11 =( -b+sqrt (b^2-4*a*c))/(2*a);
Programa\(\PageIndex{1}\). El código equivalente a Table\(\PageIndex{1}\), para su uso en programas de cómputos. Sqrt (w) es una función especialmente escrita que devuelve 0 si w es negativo (devuelve la parte real del número complejo 0 +\(\sqrt{w}\,i\)).
Las fórmulas en Table\(\PageIndex{1}\) funcionan para cualquier modelo RSN de dos especies, es decir, cualquier modelo de la forma\(\frac{1}{N_i}\frac{dN_i}{dt}\,=\,r_1\,+\,s_{i,i}N_i\,+\,s_{i,j}N_j\) con coeficientes constantes, pero las fórmulas para otros modelos deben derivarse por separado, de un paquete de software, o siguiendo métodos para matrices jacobianas.
caja\(\PageIndex{2}\) parameters for a sample Competitive system
| \(r_1\,=\,1.2\) | \(r_2\,=\,0.8\) | Tasa de crecimiento intrinísico |
| \(s_{1,1}\,=\,-1\) | \(s_{2,2}\,=\,-1\) | Términos autolimitantes |
| \(s_{1,2}\,=\,-1.2\) | \(s_{2,1}\,=\,-0.5\) | Términos de limitación cruzada |