
12.3: Modelo depredador-presa
- Page ID
- 53031

Para los próximos capítulos consideraremos dos especies, comenzando por un depredador y una presa. La figura\(\PageIndex{1}\) representa esta situación, con una línea inclinada hacia abajo y la otra hacia arriba.
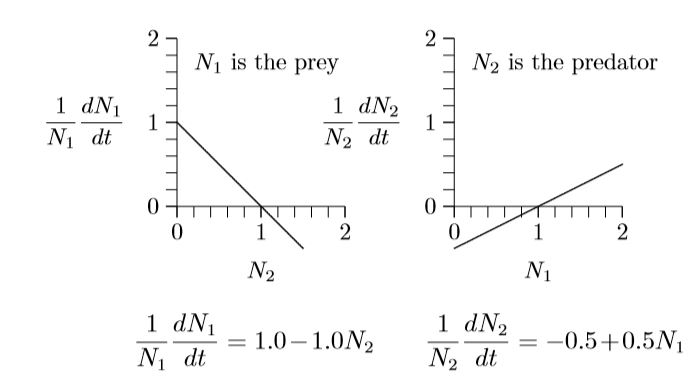
La gráfica de la izquierda describe a la presa, debido a que sus números N 1 se reducen cuando aumentan los números de depredador, N 2. De igual manera, la gráfica de la derecha describe al depredador, debido a que sus números, N 2, aumentan con la densidad de su presa, N 1. Las ecuaciones de crecimiento son reveladas por las pendientes e intercepciones de las dos líneas.
Dado que ambas son líneas rectas,\(y\,=\,mx\,+\,b\), las ecuaciones se pueden anotar simplemente a partir de la geometría. La intercepción a la izquierda es +1 y la pendiente es −1. La intercepción de la derecha es −1/2 y su pendiente es +1/2. Las ecuaciones equivalentes de las dos líneas aparecen debajo de las gráficas.
Estas ecuaciones específicas pueden generalizarse usando símbolos en lugar de números reales, escribiendo r 1, s 1,2, r 2 y s 2,1 para la intercepción +1.0 y pendiente −1.0 a la izquierda y la intercepción −0.5 y pendiente +0.5 a la derecha, de la siguiente manera.
\(\frac{1}{N_1}\frac{dN_1}{dt}\,=\,r_1\,+\,s_{1,2}N_2\,\,\,\,\,\,\,with\,r_1\,=\,+\,1.0,\,\,\,s_{1,2}\,=\,-\,1.0\)
\(\frac{1}{N_2}\frac{dN_2}{dt}\,=\,r_2\,+\,s_{2,1}N_1\,\,\,\,\,\,\,with\,r_2\,=\,-\,0.5,\,\,\,s_{2,1}\,=\,+\,0.5\)
Simplemente al anotar la forma de estas gráficas geométricas, han aparecido las clásicas ecuaciones de Predator—presa de Lotka—Volterra:
\(\frac{1}{N_1}\frac{dN_1}{dt}\,=\,r_1\,+\,s_{1,2}N_2\,\,\,\,\,\,\,with\,r_1\,>\,0,\,\,\,s_{1,2}\,<\,0\)
\(\frac{1}{N_2}\frac{dN_2}{dt}\,=\,r_2\,+\,s_{2,1}N_1\,\,\,\,\,\,\,with\,r_2\,<\,0,\,\,\,s_{2,1}\,>\,0\)
Así es como se ven las ecuaciones en muchos libros de texto, con V para densidad de presas y P para densidad de depredadores:
\(\frac{dV}{dt}\,=\,rV\,-\alpha\,VP\)
\(\frac{dP}{dt}\,=\beta\,VP\,-\,qP\)
Volterra llegó a la ecuación de manera bastante diferente que nosotros, con una tasa de crecimiento r para la presa, reducida por una tasa\(\alpha\) por cada encuentro entre depredador y presa\(V\,\cdot\,P\), y con una tasa de mortalidad natural q para depredadores y tasa de crecimiento compensatorio\(\beta\) para cada encuentro,\(V\,\cdot\,P\), entre depredador y presa.
Para ver la equivalencia, divide la primera ecuación por V y la segunda por P, luego establece\(V\,=\,N_1,\,\,P\,=\,N_2,\,\,r\,=\,r_1,\,\,q\,=\,-r_2,\,\,\alpha\,=\,-s_{1,2},\,\,\beta\,=\,s_{2,1}\). Se revelará que la formulación Lotka—Volterra es solo las ecuaciones r + sN disfrazadas.
La figura\(\PageIndex{1}\) expone las ecuaciones básicas depredador—presa desde la geometría, que revelan la unidad de las ecuaciones de la ecología, como viste en el Capítulo 5. Ese análisis reveló una forma de ecuación unidimensional no considerada en los libros de texto ecológicos, la ecuación ortóloga, y que es necesaria para comprender las poblaciones humanas y otras poblaciones de rápido crecimiento.
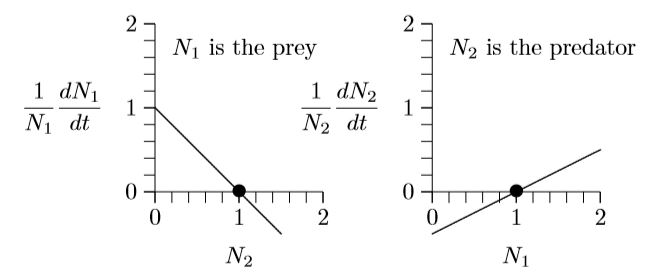
Ahora analice un poco estas ecuaciones. Supongamos que las densidades de depredadores y presas son ambas 1, digamos 1 individuo por hectárea (N 1 = N 2 = 1). Sustituye 1 tanto para N 1 como para N 2. ¿Cuáles son las tasas de crecimiento?
\(\frac{1}{1}\frac{dN_1}{dt}\,=\,1.0\,-\,1.0\,\times\,1\,=\,0\)
\(\frac{1}{1}\frac{dN_2}{dt}\,=\,-0.5\,+\,0.5\,\times\,1\,=\,0\)
El crecimiento poblacional es cero para ambas especies, por lo que las poblaciones no cambian. Esto es un equilibrio.
Esto se puede ver en las gráficas a continuación. El hecho de que ambas tasas de crecimiento,\(\frac{1}{N_1}\frac{dN_1}{dt}\) y\(\frac{1}{N_1}\frac{dN_2}{dt}\), crucen el eje horizontal en N 1 = N 2 = 1 (posición de los puntos) significa que el crecimiento se detiene para ambos. Esto se llama equilibrio, estado estacionario o, a veces, punto fijo.
Pero, ¿qué pasará si ambas poblaciones son 2, digamos 2 individuos por hectárea?
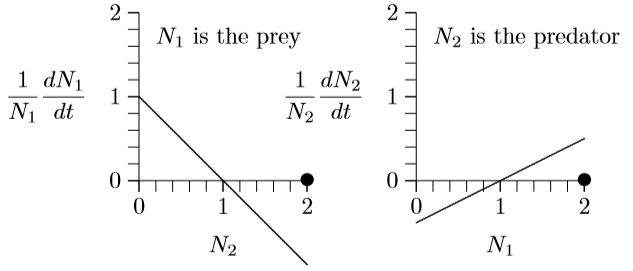
La tasa de crecimiento de presas\(\frac{1}{N_1}\frac{dN_1}{dt}\),, es negativa en N 2 = 2 (la línea está por debajo del eje horizontal) y la tasa de crecimiento depredador,\ (\ frac {1} {N_1}\ frac {dN_2} {dt}, es positiva en N 1 = 2 (la línea está por encima del eje horizontal). Por lo que la población de presas disminuirá y la población depredadora aumentará. Exactamente cómo se desarrollarán las poblaciones a lo largo del tiempo se puede elaborar poniendo estos parámetros en el programa en el Capítulo 8. Aquí lo que muestra.
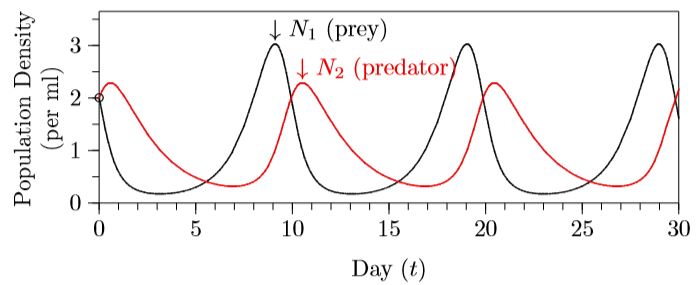
A modo de comparación, esto es lo que experimentadores tempranos como Gause y Huffaker mostraron para poblaciones de protozoos, ácaros y otros sistemas pequeños a mediados del siglo XX:
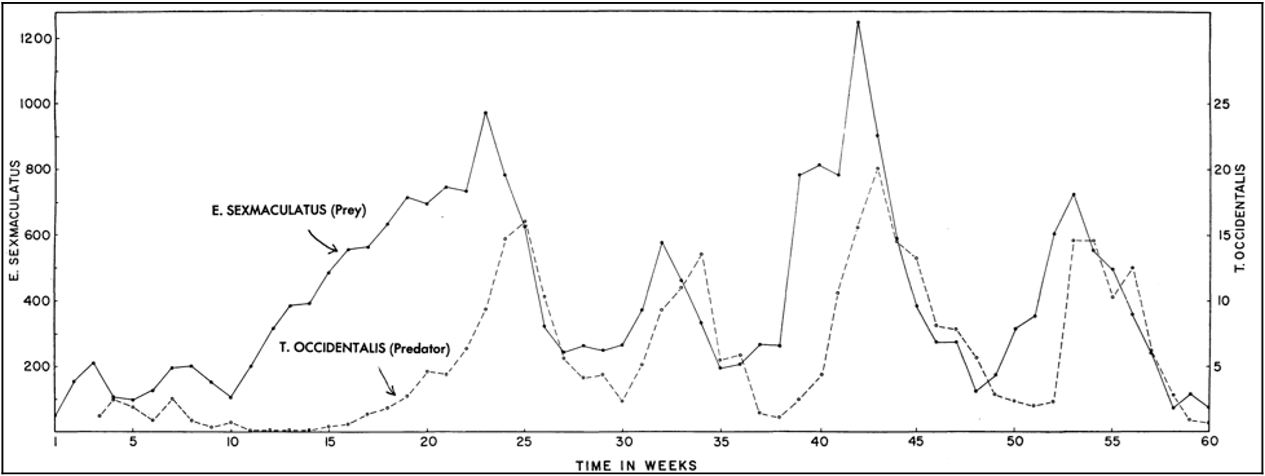
Las dinámicas aquí son muy similares a las mostradas en la versión calculada de Figura\(\PageIndex{2}\) y la versión experimental de Figura\(\PageIndex{3}\), pero con estocástica superpuesta sobre el sistema experimental. Los experimentadores, sin embargo, tuvieron dificultades para lograr el ciclismo continuo. En condiciones simples, los depredadores encontrarían a la presa y se comían hasta la última, y entonces los depredadores mismos morirían todos. El ciclismo continuo podría lograrse proporcionando a la presa lugares para escapar, o dificultando que los depredadores se muevan por el medio ambiente.