
27A: Oscilaciones: Introducción, Masa en un Muelle
- Page ID
- 129519

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)Si un problema simple de oscilación armónica no involucra el tiempo, probablemente deberías estar usando la conservación de energía para resolverlo. Un “error táctico” común en los problemas que involucran oscilaciones es manipular las ecuaciones dando la posición y la velocidad en función del tiempo,\(x=x_{\space max} cos(2\pi ft)\) y\(v=-v_{\space max} sin(2\pi ft)\) más que aplicar el principio de conservación de la energía. Esto convierte un problema fácil de cinco minutos en un problema difícil de quince minutos.
Cuando algo va y viene decimos que vibra u oscila. En muchos casos las oscilaciones involucran a un objeto cuya posición en función del tiempo está bien caracterizada por la función sinusoidal o coseno del producto de un tiempo constante y transcurrido. Tal movimiento se conoce como oscilación sinusoidal. También se le conoce como movimiento armónico simple.
Aparte de las matemáticas: La función coseno
A estas alturas, has tenido mucha experiencia con la función coseno de un ángulo como la relación del adyacente a la hipotenusa de un triángulo rectángulo. Esta definición abarca ángulos de 0 radianes a\(\frac{\pi}{2}\) radianes (\(0^{\circ}\)a\(90^{\circ}\)). Al aplicar la función coseno al movimiento armónico simple, utilizamos la definición extendida que cubre todos los ángulos. La definición extendida del coseno del ángulo\(\theta\) es que el coseno de un ángulo es el componente x de un vector unitario, cuya cola está en el origen de un sistema de coordenadas x-y; un vector unitario que originalmente apuntaba en la dirección +x pero que desde entonces se ha girado en sentido antihorario desde nuestro punto de vista, a través del ángulo\(\theta\), sobre el origen.
Aquí mostramos que la definición extendida es consistente con la definición de “adyacente sobre hipotenusa”, para ángulos entre 0 radianes y\(\frac{\pi}{2}\) radianes. Para tales ángulos, tenemos:

en el que\(u\), al ser la magnitud de un vector unitario, es por supuesto igual a 1, el número puro 1 sin unidades. Ahora bien, según la definición ordinaria del coseno de\(\theta\) como el adyacente sobre la hipotenusa:
\[\cos\space \theta=\space \frac{u_x}{u} \]
Resolviendo esto para\(u_x\) vemos que
\[u_x=u \, \cos\theta \]
Recordando eso\(u=1\), esto significa que
\[u_x=\space \cos\theta \]
Recordando que nuestra definición extendida de\(\cos \theta\) es, que es el componente x del vector unitario\(\hat{u}\) cuando\(\hat{u}\) hace un ángulo\(\theta\) con el eje x, esta última ecuación es simplemente decir que, para el caso que nos ocupa (\(\theta \)entre 0 y\(\frac{\pi}{2}\)) nuestra definición extendida de \(\cos \theta\)es equivalente a nuestra definición ordinaria.
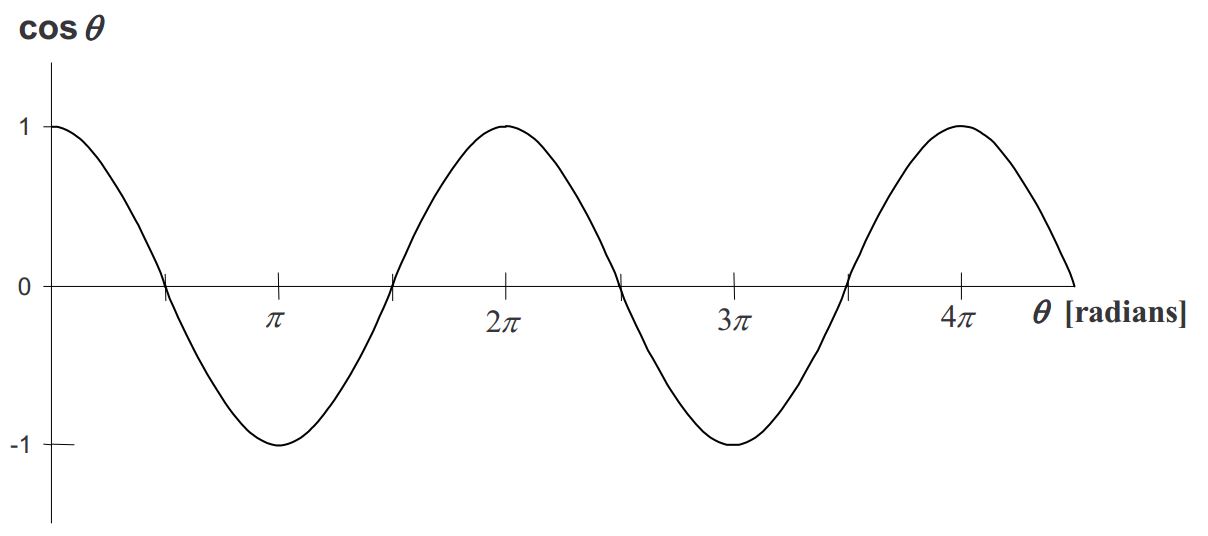
En ángulos entre\(\frac{\pi}{2}\) y\(\frac{3\pi}{2}\) radianes (\(90^{\circ}\)y\(270^{\circ}\)) vemos que\(u_x\) toma valores negativos (cuando el vector componente x está apuntando en la dirección x negativa, el valor del componente x es, por definición, negativo). De acuerdo con nuestra definición extendida,\(\cos \theta\) adquiere valores negativos en tales ángulos también.

Con nuestra definición extendida, válida para cualquier ángulo\(\theta\), una gráfica del\(\cos \theta\) vs\(\theta\) aparece como:
Algunas relaciones de cálculo que involucran al coseno
El derivado del coseno de\(\theta\), con respecto a\(\theta\):
\[ \frac{d}{d\theta} \cos\theta \space=\space -\sin\theta \]
La derivada del seno de\(\theta\), con respecto a\(\theta\):
\[ \frac{d}{d\theta} \sin\theta \space=\space \cos\theta \]
Alguna jerga que involucra las funciones sinusoidales y cosenales
Cuando expresas, defines o evalúas la función de algo, ese algo se llama el argumento de la función. Por ejemplo, supongamos que la función es la función de raíz cuadrada y la expresión en cuestión es\(\sqrt{3x}\). La expresión es la raíz cuadrada de\(3x\), entonces, en\(x\) esa expresión,\(3x\) es el argumento de la función raíz cuadrada. Ahora cuando se toma el coseno de algo, a ese algo se le llama el argumento del coseno, pero en el caso de las funciones seno y coseno, le damos otro nombre también, a saber, la fase. Entonces, cuando escribes\(\cos \theta\), la variable\(\theta\) es el argumento de la función coseno, pero también se le conoce como la fase de la función coseno.Para que una expresión que involucra la función coseno sea significativa, la fase del coseno debe tener unidades de ángulo (por ejemplo, radianes o grados).
Un bloque unido al extremo de un resorte
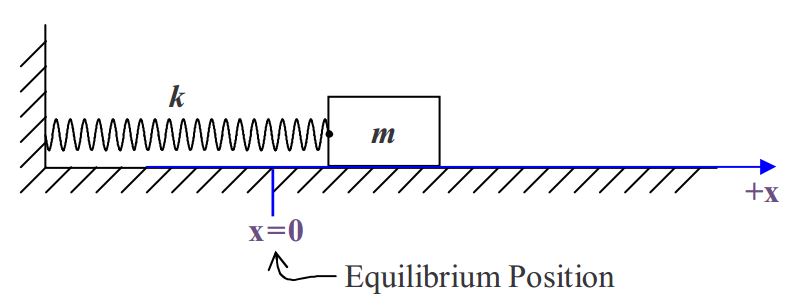
Considera un bloque de masa\(m\) sobre una superficie horizontal sin fricción. El bloque está unido, por medio de un resorte horizontal ideal sin masa que tiene fuerza constante\(k\), a una pared. Una persona ha sacado el bloque, directamente lejos de la pared, y lo ha liberado del descanso. El bloque oscila hacia adelante y hacia atrás (hacia y lejos de la pared), en el extremo del resorte. Nos gustaría encontrar ecuaciones que den la posición, velocidad y aceleración del bloque como funciones del tiempo. Comenzamos aplicando la 2ª Ley de Newton al bloque. Antes de dibujar el diagrama de cuerpo libre, dibujamos un boceto para ayudar a identificar nuestro sistema de coordenadas unidimensionales. Llamaremos a la posición horizontal del punto en el que se une el resorte, la posición\(x\) del bloque. El origen de nuestro sistema de coordenadas será la posición en la que el resorte no se estira ni se comprima. Cuando la posición\(x\) es positiva, el resorte se estira y ejerce una fuerza, sobre el bloque, en la\(-x\) dirección. Cuando la posición de\(x\) es negativa, el resorte se comprime y ejerce una fuerza, sobre el bloque, en la\(+x\) dirección.
Ahora dibujamos el diagrama de cuerpo libre del bloque:
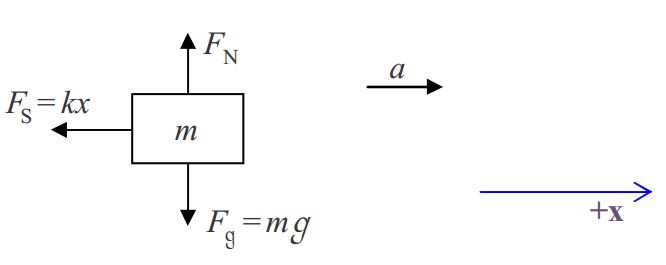
y aplicar la 2ª Ley de Newton:
\[a_{\rightarrow}=\frac{1}{m} \sum F_{\rightarrow} \]
\[a=\frac{1}{m}(-kx) \]
\[a=-\frac{k}{m}x \]
Esta ecuación, relacionando la aceleración del bloque con su posición x, puede considerarse como una ecuación que relaciona la posición del bloque con el tiempo si sustituimos por un uso:
\[a\space=\space \frac{dv}{dt} \]
y
\[v\space=\space \frac{dx}{dt} \]
por lo
\[a=\frac{d}{dt}\space \frac{dx}{dt}\]
que generalmente se escribe
\[a=\space \frac{d^2x}{dt^2}\label{27-1}\]
y leer “\(d\)cuadrado\(x\) por\(dt\) cuadrado” o “la segunda derivada de\(x\) con respecto a\(t\).”
Sustituyendo esta expresión por\(a\) into\(a=-\frac{k}{m} x\) (el resultado que derivamos de la 2ª Ley de Newton anterior) rinde
\[\frac{d^2x}{dt^2}=-\frac{k}{m}x\label{27-2}\]
Sabemos de antemano que la posición del bloque depende del tiempo. Es decir,\(x\) es una función del tiempo. Esta ecuación, ecuación\(\ref{27-2}\), nos dice que si tomas la segunda derivada de\(x\) con respecto al tiempo te pones a\(x\) sí mismo, veces una constante negativa\((-k/m)\).
Podemos encontrar la expresión a para x en términos de t que resuelve\(\ref{27-2}\) por el método de “guess and check”. Grossamente, estamos buscando una función cuya segunda derivada sea esencialmente la negativa de sí misma. Dos funciones cumplen con este criterio, el seno y el coseno. O va a funcionar. Elegimos arbitrariamente utilizar la función coseno. Incluimos algunas constantes en nuestra solución de prueba (nuestra conjetura) que se determinarán durante la parte “check” de nuestro procedimiento. Aquí está nuestra solución de prueba:
\[x= x_{max} \, \cos \left(\frac{2\pi\space \mbox{rad}}{T}t\right)\]
Así es como hemos llegado a esta solución de prueba: Habiendo establecido que x, depende del coseno de un múltiplo de la variable de tiempo, dejamos que las unidades sean nuestra guía. Necesitamos el tiempo t para ser parte del argumento del coseno, pero no podemos tomar el coseno de algo a menos que ese algo tenga unidades de ángulo. La constante\(\frac{2\pi\space \mbox{rad}}{T}\), con la constante T teniendo unidades de tiempo (usaremos segundos), la hace para que el argumento del coseno tenga unidades de radianes. Es, sin embargo, más que solo las unidades lo que nos motiva a elegir la proporción\(\frac{2\pi\space \mbox{rad}}{T}\) como la constante. Para que el argumento del coseno tenga unidades de radianes, todo lo que necesitamos es una constante con unidades de radianes por segundo. Entonces, ¿por qué escribirlo como\(\frac{2\pi\space \mbox{rad}}{T}\)? Aquí está la explicación: El bloque va y viene. Es decir, repite su movimiento una y otra vez a medida que pasa el tiempo. Comenzando con el bloque a su máxima distancia de la pared, el bloque se mueve hacia el muro, alcanza su punto de aproximación más cercano al muro y luego vuelve a salir a su distancia máxima del muro. En ese punto, está justo de vuelta de donde partió. Definimos el valor constante del tiempo\(T\) para que sea la cantidad de tiempo que toma una iteración del movimiento.
Consideremos ahora la función coseno. Lo elegimos porque su segunda derivada es la negativa de sí misma, pero se ve cada vez mejor como una función que da la posición del bloque en función del tiempo porque también se repite a medida que su fase (el argumento del coseno) aumenta continuamente. Supongamos que la fase comienza como 0 en el tiempo 0. El coseno de 0 radianes es 1, el más grande que haya obtenido el coseno. Podemos hacer que esto corresponda a que el bloque esté a su máxima distancia de la pared. A medida que aumenta la fase, el coseno se hace más pequeño, luego se vuelve negativo, llegando finalmente al valor -1 cuando la fase es π radianes. Esto podría corresponder a que el bloque esté más cerca de la pared. Entonces, a medida que la fase continúa aumentando, el coseno aumenta hasta que, cuando la fase es\(2\pi\), el coseno vuelve a subir hasta 1 correspondiente al bloque estando justo atrás de donde partió. A partir de aquí, a medida que la fase del coseno sigue aumentando de\(2\pi\) a\(4\pi\), el coseno vuelve a asumir todos los valores que tomó de 0 a\(2\pi\). Lo mismo sucede de nuevo a medida que la fase aumenta de\(4\pi\) a\(6\pi\), de\(8\pi\) a\(10\pi\), etc.
Volviendo a esa constante\(\frac{2\pi\space \mbox{rad}}{T}\) que “adivinamos” debería estar en la fase del coseno en nuestra solución de prueba para\(x(t)\):
\[x= x_{max} \, \cos\Big (\frac{2\pi\space \mbox{rad}}{T}t \Big ) \]
\(T\)Al definirse como el tiempo que tarda el bloque en ir y venir una vez, mira lo que sucede con la fase del coseno a medida que la lectura del cronómetro aumenta continuamente. A partir de 0, a medida que t aumenta de 0 a\(T\), la fase del coseno\(\frac{2\pi\space \mbox{rad}}{T}t\),, aumenta de 0 a\(2\pi\) radianes. Entonces, así como el bloque, de tiempo 0 a tiempo\(T\), pasa por un ciclo de su movimiento, el coseno, de tiempo 0 a tiempo\(T\), pasa por un ciclo de su patrón. A medida que la lectura del cronómetro aumenta de\(T\) a\(2T\), la fase del coseno aumenta de\(2\pi\) rad a\(4\pi\) rad. El bloque sufre el segundo ciclo de su movimiento y la función coseno utilizada para determinar la posición del bloque pasa por el segundo ciclo de su patrón. La idea se mantiene cierta para cualquier momento t —ya que la lectura del cronómetro continúa aumentando, la función coseno sigue repitiendo su ciclo en sincronización exacta con el bloque, como debe hacerlo si su valor es representar con precisión la posición del bloque en función del tiempo. Nuevamente, no es casualidad. Elegimos la constante\(\frac{2\pi\space \mbox{rad}}{T}\) en la fase del coseno para que las cosas funcionaran de esta manera.
Algunas palabras sobre la jerga están en orden antes de que sigamos adelante. El tiempo\(T\) que tarda el bloque en completar un ciclo completo de su movimiento se conoce como el período de las oscilaciones del bloque. Ahora, ¿qué tal esa otra constante, la “\(x_{\max}\)” en nuestra conjetura educada\(x= x_{\max} \, \cos \Big (\frac{2\pi\space \mbox{rad}}{T}t \Big )\)? Nuevamente, las unidades fueron nuestra guía. Cuando tomas el coseno de un ángulo, obtienes un número puro, un valor sin unidades. Entonces, necesitamos el\(x_{\max}\) ahí para dar a nuestra función unidades de distancia (usaremos medidores). Podemos\(x_{\max}\) relacionarnos aún más con el movimiento del bloque. Lo más grande que puede obtener el coseno de la fase es 1, así, las\(x_{\max}\) veces más grandes que puede obtener el coseno de la fase es\(x_{\max}\). Entonces, en la expresión\(x= x_{\max} \, \cos(\frac{2\pi\space \mbox{rad}}{T}t)\), siendo x la posición del bloque en cualquier momento t,\(x_{\max}\) debe ser la posición máxima del bloque, la posición del bloque, relativa a su posición de equilibrio, cuando está tan lejos de la pared como siempre se pone.
Bien, hemos dado muchas razones por las que bien\(x= x_{max} \, cos(\frac{2\pi\space \mbox{rad}}{T}t)\) debería describir el movimiento del bloque, pero a menos que sea consistente con la 2ª Ley de Newton, es decir, a menos que satisfaga la ecuación\(\ref{27-2}\):
\[\frac{d^x}{dt^2}=-\frac{k}{m} x \]
que derivamos de la 2ª Ley de Newton, no es buena. Entonces, vamos a conectarlo a la ecuación\(\ref{27-2}\) y ver si funciona. Primero, tomemos la segunda derivada\(\frac{d^2x}{dt^2}\) de nuestra solución de prueba con respecto a t (para que podamos conectarla y x misma directamente en la ecuación\(\ref{27-2}\)):
Dado
\[x= x_{\max} \, \cos(\frac{2\pi\space rad}{T}t) ,\]
la primera derivada es
\[\frac{dx}{dt}=x_{\max} \space [ -\sin(\frac{2\pi \, \mbox{rad}}{T}t)] \frac{2\pi \, \mbox{rad}}{T} \]
\[\frac{dx}{dt}=\space -\frac{2\pi \, \mbox{rad}}{T} \, x_{\max} \sin(\frac{2\pi \, \mbox{rad}}{T}t) \]
La segunda derivada es entonces
\[\frac{d^2x}{dt^2}=\space -\frac{2\pi \, \mbox{rad}}{T} \, x_{\max} \cos(\frac{2\pi \, \mbox{rad}}{T}t)\frac{2\pi \, \mbox{rad}}{T}t \]
\[\frac{d^2x}{dt^2}=\space -(\frac{2\pi \, \mbox{rad}}{T})^2 \, x_{\max} \cos(\frac{2\pi \, \mbox{rad}}{T}t) \]
Ahora estamos listos para sustituir esto y a\(x\) sí mismo,\(x=x_{\max}\space \cos(\frac{2\pi\space \mbox{rad}}{T}t)\), en la ecuación diferencial\(\frac{d^2x}{dt^2}=-\frac{k}{m}x\) (ecuación\(\ref{27-2}\)) derivada de la 2da Ley del Movimiento de Newton. La sustitución rinde:
\[-(\frac{2\pi \, \mbox{rad}}{T})^2 \, x_{\max} \, \cos(\frac{2\pi \, \mbox{rad} }{T}t)=-\frac{k}{m}x_{\max} \, \cos(\frac{2\pi \, \mbox{rad}}{T}t) \]
que copiamos aquí para su conveniencia.
\[-\Big (\frac{2\pi\space \mbox{rad}}{T} \Big )^2 \, x_{max} \, \cos \Big (\frac{2\pi \, \mbox{rad} }{T}t \Big) =-\frac{k}{m}x_{max} \, \cos\Big (\frac{2\pi \, \mbox{rad}}{T}t\Big ) \]
Los dos lados son iguales, por inspección, salvo que donde\((\frac{2\pi\space \mbox{rad}}{T})^2\) aparece a la izquierda, tenemos a\(\frac{k}{m}\) la derecha. Así, sustituyendo nuestra conjetura\(x=x_{\max} \, \cos \Big (\frac{2 \pi\space \mbox{rad}}{T}t \Big )\),, en la ecuación diferencial que estamos tratando de resolver,\(\frac{d^2x}{dt^2}=-\frac{k}{m}x\) (ecuación\(\ref{27-2}\)) conduce a una identidad si y sólo si\( \Big (\frac{2\pi\space \mbox{rad}}{T} \Big )^2=\frac{k}{m}\). Esto significa que el periodo\(T\) está determinado por las características del resorte y el bloque, más específicamente por la constante de fuerza (el “factor\(k\) de rigidez”) del resorte, y la masa (la inercia) del bloque. Resolvamos por\(T\) en cuanto a estas cantidades. De\((\frac{2\pi\space \mbox{rad}}{T})^2=\frac{k}{m}\) nosotros encontramos:
\[\frac{2\pi\space \mbox{rad}}{T}=\sqrt{\frac{k}{m}} \]
\[T=2\pi \, \mbox{rad} \sqrt{\frac{m}{k}} \]
\[T=2\pi \sqrt{\frac{m}{k}}\label{27-3}\]
donde hemos aprovechado el hecho de que un radián es, por definición, 1 m/m simplemente eliminando el “rad” de nuestro resultado.
La presencia del\(m\) en el numerador significa que cuanto mayor sea la masa, mayor será el periodo. Eso tiene sentido: esperaríamos que el bloque fuera más “lento” cuando tiene más masa. Por otro lado, la presencia del\(k\) en el denominador significa que cuanto más rígida es la primavera, más corto es el periodo. Esto también tiene sentido porque esperaríamos que un resorte rígido resultara en oscilaciones más rápidas. Anotar la ausencia de\(x_{\max}\) en el resultado para el periodo\(T\). Mucha gente esperaría que cuanto mayores sean las oscilaciones, más tiempo tardaría el bloque en completar cada oscilación, pero la ausencia de\(x_{\max}\) en nuestro resultado para\(T\) demuestra que simplemente no es así. El periodo\(T\) no depende del tamaño de las oscilaciones.
Entonces, nuestro resultado final es que un bloque de masa\(m\), sobre una superficie horizontal sin fricción, un bloque que está unido a una pared por un resorte horizontal ideal sin masa, y liberado, a la vez\(t=0\), del reposo, desde una posición\(x = x_{\max}\), a una distancia\(x_{\max}\) de su posición de equilibrio; oscilará sobre la posición de equilibrio con un periodo\(T=2\pi \sqrt{\frac{m}{k}}\). Además, la posición del bloque en función del tiempo vendrá dada por
\[x=x_{\max}\space \cos \Big (\frac{2\pi\space \mbox{rad}}{T}t \Big )\label{27-4}\]
De esta expresión para\(x(t)\) podemos derivar una expresión para la velocidad de la\(v(t)\) siguiente manera:
\[v=\frac{dx}{dt} \]
\[v=\frac{d}{dt} \Big [x_{\max} \, \cos(\frac{2\pi \, \mbox{rad}}{T}t) \Big ] \]
\[x=x_{\max}\Big [-\sin \Big (\frac{2\pi \, \mbox{rad}}{T}t \Big )\Big ] \frac{2\pi\space \mbox{rad}}{T} \]
\[x=-x_{\max}\frac{2\pi \, \mbox{rad}}{T} \sin \Big (\frac{2\pi \, \mbox{rad}}{T}t \Big )\label{27-5}\]
Y a partir de esta expresión para\(v\space (t)\) podemos obtener la aceleración de la\(a\space (t)\) siguiente manera:
\[a=\frac{dv}{dt} \]
\[a=\frac{d}{dt} \Big [-x_{\max} \frac{2\pi \, \mbox{rad}}{T} \sin \Big (\frac{2\pi \, \mbox{rad}}{T}t \Big ) \Big ] \]
\[a=-x_{\max}\space \frac{2\pi \, \mbox{rad}}{T} \Big [ \cos \Big( \frac{2\pi\space \mbox{rad}d}{T}t \Big) \Big] \frac{2\pi \, \mbox{rad}}{T} \]
\[a=-x_{\max}=\Big( \frac{2\pi\space \mbox{rad}}{T} \Big)^2 \cos \Big( \frac{2\pi\space \mbox{rad}}{T}t \Big)\label{27-6}\]
Nótese que este último resultado es consistente con la relación\(a=-\frac{k}{m}x\) entre\(a\) y\(x\) que derivamos de la 2ª Ley de Newton cerca del inicio de este capítulo. Reconociendo que el\(x_{\max}\space \cos \Big( \frac{2\pi\space \mbox{rad}}{T}t \Big)\) es\(x\) y que el\(\Big(\frac{2\pi\space \mbox{rad}}{T}\Big)^2\) es\(\frac{k}{m}\), es claro que la ecuación\(\ref{27-6}\) es lo mismo que
\[a=-\frac{k}{m}x\label{27-7}\]
Frecuencia
El periodo se\(T\) ha definido como el tiempo que toma una oscilación completa. En las unidades SI podemos pensarlo como el número de segundos por oscilación. El recíproco de\(T\) es así el número de oscilaciones por segundo. Esta es la velocidad a la que ocurren las oscilaciones. Le damos un nombre, frecuencia, y un símbolo,\(f\).
\[f=\frac{1}{T}\label{27-8}\]
Las unidades funcionan para ser las\(\frac{1}{s}\) que podemos pensar\(\frac{\mbox{oscillations}}{s}\) como la oscilación, al igual que el radián es un marcador más que una unidad verdadera. Se le ha asignado un nombre especial a la unidad de frecuencia SI,\(1\frac{\mbox{oscillations}}{s}\) se define como 1 hercio, abreviado 1 Hz. Se puede pensar en 1 Hz como cualquiera\(1\frac{\mbox{oscillations}}{s}\) o simplemente\(1\frac{1}{s}\).
En términos de frecuencia, más que de período, podemos utilizar\(f=\frac{1}{T}\) para expresar todos nuestros resultados anteriores en términos de\(f\) más que\(t\).
\[f=\frac{1}{2\pi}\sqrt{\frac{k}{m}} \]
\[x=x_{\max} \, \cos \Big(2\pi\space \mbox{rad} \space f\space t \Big) \]
\[v=-2\pi f x_{\max} \, \sin \Big(2\pi\space \mbox{rad} \space f\space t \Big) \]
\[a=-(2\pi f)^2 \cos \Big( 2\pi\space \mbox{rad} \space f \, t\Big) \]
Al inspeccionar las expresiones para la velocidad y aceleración anteriores vemos que el mayor valor posible para la velocidad es\(2\pi f x_{\max}\) y el mayor valor posible para la aceleración es\((2\pi f)^2 x_{\max}\). Definir
\[v_{\max}=\space x_{\max} (2\pi f)\label{27-9}\]
y
\[a_{\max}=x_{\max} (2\pi f)^2\label{27-10}\]
y, omitiendo las unidades “rad” de la fase (cargando así al usuario con recordar que las unidades de la fase son radianes mientras hacen que las expresiones sean un poco más concisas) tenemos:
\[x=x_{\max} \, \cos(2\pi f\space t)\label{27-11}\]
\[v=-v_{\max}\space \sin(2\pi f\space t)\label{27-12}\]
\[a=-a_{\max} \, \cos(2\pi f\space t)\label{27-13}\]
La ecuación armónica simple
Cuando el movimiento de un objeto es sinusoidal como en\(x=x_{max}\space \cos (2\pi f\space t)\), nos referimos al movimiento como movimiento armónico simple. En el caso de un bloque en un muelle encontramos que
\[ a=-\Big| \mbox{constant} \Big|\space x\label{27-14}\]
donde\(\Big| \mbox{constant} \Big|\) se demostró que el era\(\frac{k}{m}\) y era igual a\((2\pi\space f)^2\). Escrito como
\[ \frac{d^2x}{dt^2}=-(2\pi\space f)^2 \, x\label{27-15}\]
la ecuación es una ecuación completamente general, no específica de un bloque en un resorte. En efecto, cada vez que encuentre que, para cualquier sistema, la segunda derivada de la variable de posición, con respecto al tiempo, es igual a una constante negativa multiplicada por la propia variable de posición, se trata de un caso de simple movimiento armónico, y se puede equiparar el valor absoluto de la constante a\((2\pi\space f)^2\).