
6.16: Receptores de Comunicación Digital
- Page ID
- 85386

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)- Flujos de bits a través de receptores de comunicaciones digitales
El receptor interesado en el flujo de bits transmitido debe realizar dos tareas cuando\(r(t)\) comienza la forma de onda recibida.
- Debe determinar cuándo ocurren los límites de bits: El receptor necesita sincronizarse con la señal transmitida. Debido a que el transmisor y el receptor están diseñados en concierto, ambos usan el mismo valor para el intervalo de bits\(T\). La sincronización puede ocurrir porque el transmisor comienza a enviar con una secuencia de bits de referencia, conocida como preámbulo. Esta secuencia de bits de referencia suele ser la secuencia alterna como se muestra en el ejemplo de onda cuadrada y en el ejemplo FSK. El receptor sabe cuál es la secuencia de bits de preámbulo y la usa para determinar cuándo ocurren los límites de bits. Este procedimiento equivale a lo que en el hardware digital como señalización de sincronización automática: El receptor de un flujo de bits debe derivar el reloj —cuando se producen límites de bits— de su señal de entrada. Debido a que el receptor generalmente no determina qué bit se envió hasta que se produce la sincronización, no sabe cuándo durante el preámbulo obtuvo la sincronización. El transmisor señala el final del preámbulo conmutando a una segunda secuencia de bits. La segunda fase de preámbulo informa al receptor que los bits de datos están a punto de llegar y que el preámbulo está casi terminado.
- Una vez sincronizados y transmitidos los bits de datos, el receptor debe entonces determinar cada\(T\) segundo qué bit se transmitió durante el intervalo de bits anterior. Nos enfocamos en este aspecto del receptor digital porque esta estrategia también se utiliza en la sincronización.
El receptor para comunicación digital se conoce como filtro coincidente.
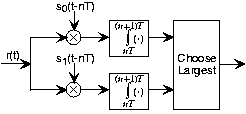
Este receptor, mostrado en la Figura 6.16.1, multiplica la señal recibida por cada uno de los posibles miembros del conjunto de señales del transmisor, integra el producto a lo largo del intervalo de bits, y compara los resultados. Cualquiera que sea la ruta a través del receptor que produzca el mayor valor corresponde a la decisión del receptor en cuanto a qué bit se envió durante el intervalo de bits anterior. Para el siguiente intervalo de bits, la multiplicación y la integración comienzan de nuevo, con la siguiente decisión de bit tomada al final del intervalo de bits. Matemáticamente, el valor recibido de\(b(n)\) viene dado por:
\[b(n)=\hat{b}(n)=\underset{i}{\arg max}\int_{nT}^{(n+1)T}r(t)s_{i}(t)dt \nonumber \]
Puede que no hayas visto el
\[\underset{i}{\arg max} \nonumber \]
notación antes.
\[\max _{i}\left \{ i, \cdot \right \} \nonumber \]
arroja el valor máximo de su argumento con respecto al índice\(i\)
\[\underset{i}{\arg max} \nonumber \]
es igual al valor del índice que arroja el máximo. Tenga en cuenta que el valor numérico preciso de la salida del integrador no importa; lo que sí importa es su valor relativo a la salida del otro integrador.
Asumamos un canal perfecto por el momento: La señal recibida es igual a la transmitida. Si el bit 0 se enviara usando el conjunto de señales BPSK de banda base, las salidas del integrador serían
\[\int_{nT}^{(n+1)T}r(t)s_{0}(t)dt=A^{2}T \nonumber \]
\[\int_{nT}^{(n+1)T}r(t)s_{1}(t)dt=-(A^{2}T) \nonumber \]
Si se envió el bit 1,
\[\int_{nT}^{(n+1)T}r(t)s_{0}(t)dt=-(A^{2}T) \nonumber \]
\[\int_{nT}^{(n+1)T}r(t)s_{1}(t)dt=A^{2}T \nonumber \]
¿Se puede desarrollar un receptor para conjuntos de señales BPSK que requiera solo una combinación de multiplicador-integrador?
Solución
En BPSK, las señales son negativas entre sí:
\[s_{1}(t)=-s_{0}(t) \nonumber \]
En consecuencia, la salida de cada combinación multiplicador-integrador es la negativa de la otra. Elegir el más grande, por lo tanto, equivale a elegir cuál es positivo. Sólo tenemos que calcular uno de estos. Si es positivo, ya terminamos. Si es negativo, elegimos la otra señal.
¿Cuál es el resultado correspondiente cuando se utiliza el conjunto de señales BPSK moduladas en amplitud?
Solución
Las salidas de filtro coincidentes son
\[\pm \left ( \frac{A^{2}T}{2} \right ) \nonumber \]
porque la sinusoide tiene menos potencia que un pulso que tiene la misma amplitud.
Claramente, este receptor siempre elegiría el bit correctamente. La atenuación del canal no afectaría esta corrección; sólo haría que los valores fueran más pequeños, pero lo único que importa es cuál es el mayor.