
8.5: Restricciones naturales
- Page ID
- 143800

Algunos investigadores argumentarían que la percepción es una forma de cognición, porque utiliza el razonamiento inferencial o el procesamiento de resolución de problemas para ir más allá de la información dada. Sin embargo, este tipo de cuenta no es el único enfoque viable para hacer frente a la pobreza del estímulo visual. Rock (1983, p. 3) escribió: “Un fenómeno puede parecer inteligente, pero el mecanismo subyacente puede no tener un terreno común con los mecanismos subyacentes al razonamiento, el pensamiento lógico o la resolución de problemas”. El enfoque de computación natural de la visión (Ballard, 1997; Marr, 1982; Richards, 1988) ilustra la sabiduría de la cita de Rock, porque intenta resolver problemas de subdeterminación mediante el uso de dispositivos de abajo hacia arriba que aplican restricciones incorporadas para filtrar interpretaciones incorrectas de un proximal ambiguo estímulo.
La idea central que subyace al cálculo natural es la propagación de restricciones. Imagine un conjunto de ubicaciones a las que se pueden asignar etiquetas, donde cada etiqueta es una posible propiedad que está presente en una ubicación. La subdeterminación existe cuando es posible más de una etiqueta en varias ubicaciones. Sin embargo, se pueden aplicar restricciones para eliminar estas ambigüedades. Imagine que si alguna etiqueta x se asigna a una ubicación entonces esto evita que otra etiqueta y se asigne a una ubicación vecina. Digamos que hay buena evidencia para asignar la etiqueta x a la primera ubicación. Una vez hecho esto, una restricción puede propagarse hacia afuera desde esta ubicación hasta sus vecinos, eliminando la etiqueta y como posibilidad para ellos y por lo tanto reduciendo la ambigüedad.
La propagación de restricciones es parte de la ciencia que subyace a los populares rompecabezas de Sudoku (Delahaye, 2006). Un rompecabezas Sudoku es una cuadrícula de celdas de 9 × 9, como se ilustra en la Figura 8-3. La cuadrícula se divide además en una matriz de 3 × 3 de rejillas más pequeñas de 3 × 3 llamadas jaulas. En la Figura 8-3, las jaulas están delineadas por las líneas más gruesas. Cuando se resuelve el rompecabezas, cada celda contendrá un dígito del rango 1 al 9, sujeto a tres restricciones. Primero, un dígito puede ocurrir solo una vez en cada fila de 9 celdas a través de la cuadrícula. Segundo, un dígito solo puede ocurrir una vez en cada columna de 9 celdas a lo largo de la cuadrícula. Tercero, un dígito solo puede ocurrir una vez en cada jaula en la cuadrícula. El rompecabezas comienza con ciertos números ya asignados a sus celdas, como se ilustra en la Figura 8-3. La tarea consiste en rellenar los dígitos restantes de tal manera que no se infrinja ninguna de las tres reglas restrictivas.
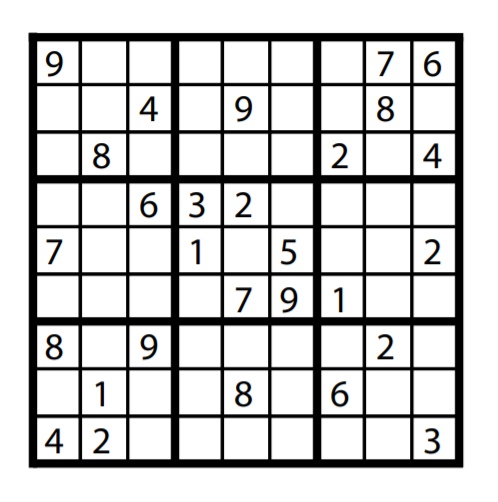
Figura 8-3. Un ejemplo de rompecabezas Sudoku.
Un rompecabezas de Sudoku puede considerarse como un problema a resolver mediante el etiquetado de relajación. En el etiquetado de relajación, los juegos de etiquetas posibles están disponibles en diferentes ubicaciones. Por ejemplo, al inicio del rompecabezas dado en la Figura 8-3 las etiquetas posibles en cada celda en blanco son 1, 2, 3, 4, 5, 6, 7, 8 y 9. Solo hay una etiqueta posible (dada en la figura) que ya ha sido asignada a cada una de las celdas restantes. La tarea del etiquetado de relajación es eliminar iterativamente etiquetas adicionales en las ubicaciones ambiguas, de modo que al final del procesamiento solo quede una etiqueta.
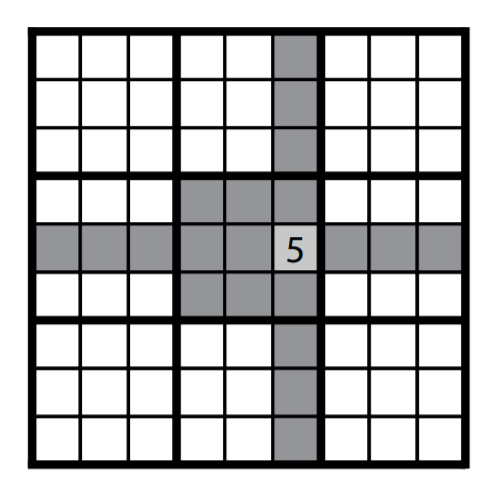
Figura 8-4. La restricción “solo puede haber una” que se propaga desde la celda etiquetada 5
En el contexto del etiquetado de relajación, los rompecabezas de Sudoku pueden resolverse propagando diferentes restricciones a través de la cuadrícula; esto hace que las etiquetas potenciales se eliminen de celdas ambiguas. Una restricción clave, llamada “solo puede haber una”, emerge de la definición primaria de un rompecabezas de Sudoku. En el problema de ejemplo dado en la Figura 8-3, el dígito 5 se ha asignado al inicio a una ubicación particular, que también se muestra en la Figura 8-4. De acuerdo con las reglas de Sudoku, esto significa que este dígito no puede aparecer en ningún otro lugar de la columna, fila o jaula que contenga esta ubicación. Las localizaciones afectadas están sombreadas en gris oscuro en la Figura 8-4. Se puede propagar la restricción “solo puede haber una” a través de estas ubicaciones, eliminando el dígito 5 como posible etiqueta para cualquiera de ellas.
Esta restricción se puede propagar iterativamente a través del rompecabezas. Durante una iteración, cualquier celda con una etiqueta única puede usarse para eliminar esa etiqueta de todas las otras celdas que controla (por ejemplo, como en la Figura 8-4). Cuando esta restricción se aplica de esta manera, el resultado puede ser que algunas celdas nuevas tengan etiquetas únicas. En este caso la restricción se puede aplicar de nuevo, a partir de estas celdas recién únicas, para desambiguar aún más el rompecabezas de Sudoku.
La restricción de “solo puede haber una” es importante, pero no es lo suficientemente poderosa por sí sola para resolver cualquier problema que no sea el más fácil de Sudoku. Esto significa que también se deben emplear otras restricciones. Otra restricción se llama “última etiqueta disponible” y se ilustra en la Figura 8-5.
La Figura 8-5A ilustra una de las jaulas del problema del Sudoku de la Figura 8-3 a medio camino de ser resuelto (es decir, después de algunas iteraciones de “solo puede haber una”). Las celdas que contienen un solo número han sido etiquetadas de forma única. Las otras celdas aún tienen más de una etiqueta posible, que se muestra como múltiples dígitos dentro de la celda. Observe la celda en la parte inferior sombreada en gris. Cuenta con las etiquetas posibles 1, 3, 5 y 9. Sin embargo, esta celda tiene la “última etiqueta disponible” de 9, la etiqueta 9 no está disponible en ninguna otra celda de la jaula. Debido a que se requiere un 9 para estar en esta jaula, esto significa que esta etiqueta debe asignarse aquí y las otras tres etiquetas posibles de la celda se pueden quitar. Tenga en cuenta que cuando esto se hace, la restricción de “última etiqueta disponible” se aplica a una segunda celda (mostrada en gris en la Figura 8-5B), lo que significa que se le puede asignar de manera única la etiqueta 1 aplicando esta restricción por segunda vez.
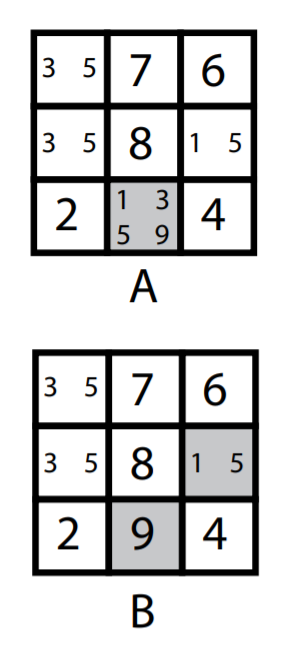
Figura 8-5. La restricción de “última etiqueta disponible”.
Después de dos aplicaciones de la restricción de “última etiqueta disponible”, la jaula ilustrada en la Figura 8-5A se convierte en la jaula mostrada en la parte superior de la Figura 8-6. Tenga en cuenta que esta jaula tiene sólo dos celdas ambiguas, cada una con las posibles etiquetas 3 y 5. Estas dos celdas definen lo que los solucionadores de Sudoku llaman un par desnudo, que puede usarse para definir una tercera regla llamada la “restricción de par desnudo”.
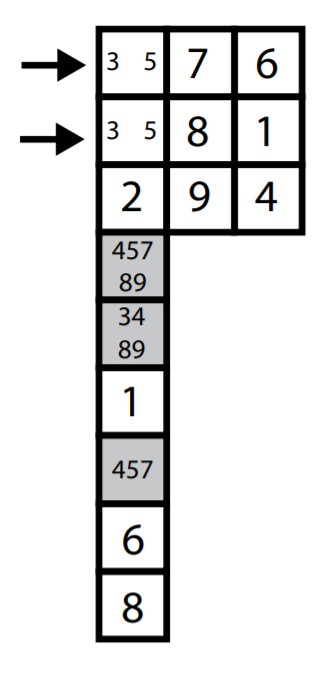
Figura 8-6. La “restricción de par desnudo”.
En el par desnudo señalado por las dos flechas en la Figura 8-6, es imposible que una celda reciba la etiqueta 3 y que la otra celda no reciba la etiqueta 5. Esto se debe a que estas dos celdas solo tienen dos etiquetas posibles restantes, y ambos conjuntos de etiquetas son idénticos. Sin embargo, esto también implica que las etiquetas 3 y 5 no pueden existir en otra parte de la parte del rompecabezas sobre la que tienen control las dos celdas que contienen el par desnudo. Así se puede usar esto como restricción para eliminar las posibles etiquetas 3 y 5 de las otras celdas en la misma columna que el par desnudo, es decir, las celdas sombreadas en gris en la parte inferior de la Figura 8-6.
Las tres restricciones descritas anteriormente se han implementado como modelo de trabajo en una hoja de cálculo Excel. Este modelo ha confirmado que aplicando solo estas tres restricciones uno puede resolver una variedad de problemas de Sudoku de dificultad fácil y media, y puede avanzar sustancialmente en problemas difíciles. (Estas tres restricciones no son suficientes para resolver el difícil problema de la Figura 8-3). Para desarrollar un solucionador de Sudoku más exitoso en este marco, uno tendría que identificar restricciones adicionales que puedan ser utilizadas. Una búsqueda en Internet de “consejos de Sudoku” revela una serie de estrategias avanzadas que pueden describirse como limitaciones, y que podrían agregarse a un modelo de etiquetado de relajación.
Para nuestros propósitos, sin embargo, el ejemplo de Sudoku anterior ilustra cómo se pueden propagar las restricciones para resolver problemas de subdeterminación. Además, muestra que tales soluciones pueden ser de naturaleza bastante mecánica, sin requerir razonamiento de orden superior o resolución de problemas. Por ejemplo, la restricción “solo puede haber una” podría ser instanciada como un simple conjunto de interruptores interconectados: encender el 5 en la Figura 8-4 enviaría una señal que apagaría el 5 en todas las otras ubicaciones sombreadas en gris.
El enfoque de computación natural de la visión asume que los problemas de subdeterminación visual también se resuelven mediante procesos no cognitivos que utilizan la propagación de restricciones. Sin embargo, las limitaciones de interés para dichos investigadores no son reglas formales de un juego. En cambio, adoptan el realismo ingenuo, y asumen que el mundo externo está estructurado y que algunos aspectos de esta estructura deben ser ciertos en casi todas las escenas visuales. Debido a que el sistema visual ha evolucionado para funcionar en este entorno estructurado, ha interiorizado aquellas propiedades que le permiten resolver problemas de subdeterminación. “El sistema perceptual ha interiorizado las regularidades más penetrantes y perdurables del mundo” (Shepard, 1990, p. 181).
Las regularidades de interés para los investigadores que avalan la computación natural se denominan restricciones naturales. Una restricción natural es una propiedad que es casi invariablemente cierta para cualquier ubicación en una escena visual. Por ejemplo, muchas propiedades visuales de escenas tridimensionales, como la profundidad, el color, la textura y el movimiento, varían suavemente. Esto significa que dos ubicaciones en la escena tridimensional que están muy juntas probablemente tengan valores muy similares para cualquiera de estas propiedades, mientras que este no será el caso de ubicaciones que están más separadas. Por lo tanto, la suavidad se puede utilizar para restringir las interpretaciones de un estímulo proximal: una interpretación cuyas propiedades varían suavemente es mucho más probable que sea cierta para el mundo que interpretaciones en las que no se mantiene la suavidad de la propiedad.
Las restricciones naturales se utilizan para resolver problemas visuales de subdeterminación imponiendo restricciones adicionales a las interpretaciones de escena. Además de ser consistente con el estímulo proximal, la interpretación de la entrada visual también debe ser consistente con las restricciones naturales. Con limitaciones naturales adecuadas, sólo una sola interpretación cumplirá ambos criterios (para muchos ejemplos, ver Marr, 1982). Un objetivo importante de investigación para quienes avalan el enfoque de computación natural de la visión es identificar restricciones naturales que filtran interpretaciones correctas de todas las otras posibilidades (incorrectas).
Por ejemplo, consideremos el problema de la correspondencia de movimiento (Ullman, 1979), que es fundamental para la teoría híbrida de la cognición visual de Pylyshyn (2003b, 2007). En el problema de correspondencia de movimiento, un conjunto de elementos se ve a la vez, y otro conjunto de elementos se ve en un momento posterior. Para que el sistema visual asocie un sentido de movimiento a estos elementos, sus identidades deben ser rastreadas a lo largo del tiempo. La afirmación de que algún elemento x, visto en el tiempo t, es “lo mismo” que algún otro elemento y, visto en el tiempo t + 1, se denomina coincidencia de correspondencia de movimiento. Sin embargo, la asignación de coincidencias de correspondencia de movimiento está subdeterminada. Esto se ilustra en la Figura 8-7 como un simple estímulo de movimiento aparente en el que se presentan dos cuadrados (contornos discontinuas) a la vez, y luego se presentan en diferentes ubicaciones (contornos sólidos). Para esta visualización hay dos conjuntos lógicos de coincidencias de correspondencia de movimiento que se pueden asignar, mostrados en B y C de la figura. Ambos conjuntos de coincidencias son consistentes con la visualización, pero representan interpretaciones radicalmente diferentes de las identidades de los elementos a lo largo del tiempo. Los observadores humanos de esta exhibición lo experimentarán invariablemente como Figura 8-7B, y nunca como Figura 8-7C. ¿Por qué se prefiere esta interpretación sobre la otra, que parece igual de lógicamente plausible?
El enfoque de computación natural responde a esta pregunta afirmando que la interpretación ilustrada en la Figura 8-7B es consistente con restricciones naturales adicionales, mientras que la interpretación en la Figura 8-7C no lo es. Se han identificado varias restricciones naturales diferentes sobre el problema de la correspondencia de movimiento y luego incorporadas a simulaciones informáticas de la percepción del movimiento (Dawson, 1987, 1991; Dawson, Nevin-Meadows, &Wright, 1994; Dawson&Pylyshyn, 1988; Dawson& Wright, 1989, 1994; Ullman, 1979).
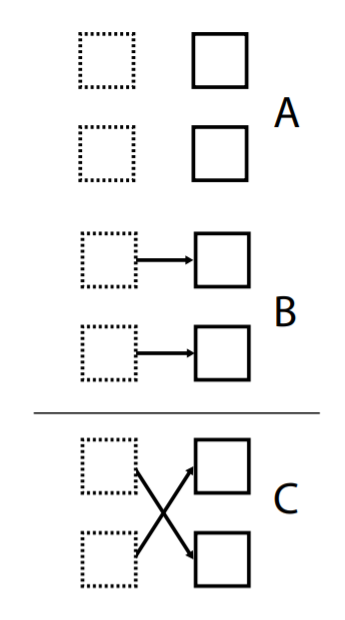
Figura 8-7. El problema de la correspondencia de movimiento.
Una de esas restricciones se llama el principio del vecino más cercano. El sistema visual prefiere asignar coincidencias de correspondencia que representen desplazamientos cortos de elementos (Burt & Sperling, 1981; Ullman, 1979). Por ejemplo, las dos coincidencias de correspondencia de movimiento en la Figura 8-7B son más cortas que las dos en la Figura 8-7C; por lo tanto, son más consistentes con el principio de vecino más cercano.
El principio del vecino más cercano es una restricción natural porque surge de la geometría de las condiciones típicas de visualización para el movimiento (Ullman, 1979, pp. 114—118). Cuando el movimiento en un mundo tridimensional se proyecta sobre una superficie bidimensional (por ejemplo, la retina), ocurren movimientos más lentos con una probabilidad mucho mayor en la retina que los movimientos más rápidos. Una preferencia por un movimiento más lento equivale a explotar el principio de vecino más cercano, porque una coincidencia de correspondencia corta representa cámara lenta, mientras que una coincidencia de correspondencia larga representa movimiento rápido.
Otra poderosa restricción en el problema de la correspondencia de movimiento se llama el principio de velocidad relativa (Dawson, 1987, 1991). En la medida en que los elementos visuales surjan de rasgos físicos en superficies sólidas, el movimiento de los elementos vecinos debe ser similar. De acuerdo con el principio de velocidad relativa, las coincidencias de correspondencia de movimiento deben asignarse de tal manera que a los objetos ubicados cerca unos de otros se les asignen coincidencias de correspondencia consistentes con movimientos de dirección y velocidad similares. Esto es cierto para las dos coincidencias ilustradas en la Figura 8-7B, que son de longitud y dirección idénticas, pero no de las dos coincidencias ilustradas en la Figura 8-7C, que son de idéntica longitud pero representan el movimiento en diferentes direcciones.
Al igual que la restricción de vecino más cercano, el principio de velocidad relativa es una restricción natural. Es una variante de la propiedad que el movimiento varía suavemente a través de una escena (Hildreth, 1983; Horn & Schunk, 1981). Es decir, a medida que los objetos en el mundo real se mueven, las ubicaciones cercanas entre sí deberían moverse de manera similar. Además, Hildreth (1983) ha demostrado que los objetos sólidos que se mueven arbitrariamente en el espacio tridimensional proyectan patrones suaves únicos de movimiento retiniano. El principio de velocidad relativa explota esta propiedad general del movimiento proyectado.
También se han propuesto otras limitaciones naturales en la correspondencia de movimiento. El principio de integridad del elemento es una restricción en la que las coincidencias de correspondencia de movimiento se asignan de tal manera que los elementos rara vez se dividen en dos o se fusionan en uno solo (Ullman, 1979). Es una restricción natural en el sentido de que la coherencia física de las superficies implica que las divisiones o fusiones son poco probables. El principio de coincidencia de polaridad es una restricción en la que las coincidencias de correspondencia de movimiento se asignan entre elementos de contraste idéntico (por ejemplo, entre dos elementos que son ambos claros contra un fondo oscuro, o entre dos elementos que son oscuros contra un fondo claro) (Dawson, Nevin-Meadows, & Wright, 1994). Es una restricción natural porque el movimiento de un objeto en el mundo puede cambiar su forma y color, pero es poco probable que altere el contraste del objeto en relación con su fondo.
El enfoque de computación natural de la visión es una alternativa a un enfoque clásico llamado inferencia inconsciente, porque las restricciones naturales pueden ser explotadas por sistemas que no son cognitivos, que no realizan inferencias sobre la base de contenidos cognitivos. En particular, es muy común ver modelos de cómputos naturales expresados en una forma muy anticlásica, es decir, redes neuronales artificiales (Marr, 1982). De hecho, las redes neuronales artificiales proporcionan un medio ideal para propagar restricciones para resolver problemas de subdeterminación.
El problema de correspondencia de movimiento proporciona un ejemplo de un enfoque de red neuronal artificial para resolver problemas de subdeterminación (Dawson, 1991; Dawson, Nevin-Meadows, &Wright, 1994). Dawson (1991) creó una red neuronal artificial que incorporaba el vecino más cercano, la velocidad relativa, la integridad del elemento y los principios de coincidencia de polaridad. Estos principios se realizaron como patrones de conexiones excitadoras e inhibitorias entre procesadores, representando cada procesador una posible coincidencia de correspondencia de movimiento. Por ejemplo, la conexión entre dos coincidencias que representaban movimientos similares en distancia y dirección tendría un componente excitatorio que reflejaba el principio de velocidad relativa. Dos coincidencias que representaban movimientos de diferentes distancias y direcciones tendrían un componente inhibitorio que reflejara el mismo principio. La red comenzaría con todos los procesadores encendidos a valores similares (indicando que cada coincidencia era inicialmente igualmente probable), y luego la red enviaría señales iterativamente entre los procesadores. La red convergería rápidamente a un estado en el que algunos procesadores permanecían encendidos (representando las coincidencias de correspondencia preferidas) mientras que todos los demás estaban apagados. Este modelo demostró ser capaz de modelar una amplia variedad de fenómenos en la extensa literatura sobre la percepción del movimiento aparente.
El enfoque de computación natural se define por otra característica que lo distingue de la ciencia cognitiva clásica. Las limitaciones naturales no son propiedades psicológicas, sino propiedades del mundo, o propiedades de cómo el mundo se proyecta sobre los ojos. “Las limitaciones visuales que se han descubierto hasta ahora se basan casi en su totalidad en principios que derivan de las leyes de la óptica y la geometría proyectiva” (Pylyshyn, 2003b, p. 120). Los agentes explotan las restricciones naturales, o más precisamente, internalizan estas restricciones en procesadores especiales que constituyen lo que Pylyshyn llama visión temprana, porque generalmente son verdaderas del mundo y, por lo tanto, funcionan.
Para las teorías clásicas que apelan a la inferencia inconsciente, las restricciones naturales son meramente “bolsas heurísticas de trucos” que pasan a funcionar (Anstis, 1980; Ramachandran & Anstis, 1986); no hay intento de basar estos trucos en la estructura del mundo. En contraste, las teorías de computación natural se encarnan, porque apelan a la estructura en el mundo externo y a cómo esa estructura incide en los agentes perceptuales. Como escribe el naturalista Harold Horwood (1987, p. 35): “Si miras atentamente a un pez puedes ver que el agua le ha dado forma. El pez no está simplemente en el agua: las cualidades del agua misma han llamado a los peces a existir.