
13.66: Juntas
- Page ID
- 108219
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\dsum}{\displaystyle\sum\limits} \)
\( \newcommand{\dint}{\displaystyle\int\limits} \)
\( \newcommand{\dlim}{\displaystyle\lim\limits} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\(\newcommand{\longvect}{\overrightarrow}\)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\(\newcommand{\avec}{\mathbf a}\) \(\newcommand{\bvec}{\mathbf b}\) \(\newcommand{\cvec}{\mathbf c}\) \(\newcommand{\dvec}{\mathbf d}\) \(\newcommand{\dtil}{\widetilde{\mathbf d}}\) \(\newcommand{\evec}{\mathbf e}\) \(\newcommand{\fvec}{\mathbf f}\) \(\newcommand{\nvec}{\mathbf n}\) \(\newcommand{\pvec}{\mathbf p}\) \(\newcommand{\qvec}{\mathbf q}\) \(\newcommand{\svec}{\mathbf s}\) \(\newcommand{\tvec}{\mathbf t}\) \(\newcommand{\uvec}{\mathbf u}\) \(\newcommand{\vvec}{\mathbf v}\) \(\newcommand{\wvec}{\mathbf w}\) \(\newcommand{\xvec}{\mathbf x}\) \(\newcommand{\yvec}{\mathbf y}\) \(\newcommand{\zvec}{\mathbf z}\) \(\newcommand{\rvec}{\mathbf r}\) \(\newcommand{\mvec}{\mathbf m}\) \(\newcommand{\zerovec}{\mathbf 0}\) \(\newcommand{\onevec}{\mathbf 1}\) \(\newcommand{\real}{\mathbb R}\) \(\newcommand{\twovec}[2]{\left[\begin{array}{r}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\ctwovec}[2]{\left[\begin{array}{c}#1 \\ #2 \end{array}\right]}\) \(\newcommand{\threevec}[3]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\cthreevec}[3]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \end{array}\right]}\) \(\newcommand{\fourvec}[4]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\cfourvec}[4]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \end{array}\right]}\) \(\newcommand{\fivevec}[5]{\left[\begin{array}{r}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\cfivevec}[5]{\left[\begin{array}{c}#1 \\ #2 \\ #3 \\ #4 \\ #5 \\ \end{array}\right]}\) \(\newcommand{\mattwo}[4]{\left[\begin{array}{rr}#1 \amp #2 \\ #3 \amp #4 \\ \end{array}\right]}\) \(\newcommand{\laspan}[1]{\text{Span}\{#1\}}\) \(\newcommand{\bcal}{\cal B}\) \(\newcommand{\ccal}{\cal C}\) \(\newcommand{\scal}{\cal S}\) \(\newcommand{\wcal}{\cal W}\) \(\newcommand{\ecal}{\cal E}\) \(\newcommand{\coords}[2]{\left\{#1\right\}_{#2}}\) \(\newcommand{\gray}[1]{\color{gray}{#1}}\) \(\newcommand{\lgray}[1]{\color{lightgray}{#1}}\) \(\newcommand{\rank}{\operatorname{rank}}\) \(\newcommand{\row}{\text{Row}}\) \(\newcommand{\col}{\text{Col}}\) \(\renewcommand{\row}{\text{Row}}\) \(\newcommand{\nul}{\text{Nul}}\) \(\newcommand{\var}{\text{Var}}\) \(\newcommand{\corr}{\text{corr}}\) \(\newcommand{\len}[1]{\left|#1\right|}\) \(\newcommand{\bbar}{\overline{\bvec}}\) \(\newcommand{\bhat}{\widehat{\bvec}}\) \(\newcommand{\bperp}{\bvec^\perp}\) \(\newcommand{\xhat}{\widehat{\xvec}}\) \(\newcommand{\vhat}{\widehat{\vvec}}\) \(\newcommand{\uhat}{\widehat{\uvec}}\) \(\newcommand{\what}{\widehat{\wvec}}\) \(\newcommand{\Sighat}{\widehat{\Sigma}}\) \(\newcommand{\lt}{<}\) \(\newcommand{\gt}{>}\) \(\newcommand{\amp}{&}\) \(\definecolor{fillinmathshade}{gray}{0.9}\)
¿Qué permite correr?
Corriendo. Un medio de locomoción terrestre que permite a los humanos y otros animales moverse rápidamente a pie. Las rodillas, que conectan una parte de la pierna con la otra, tienen que permitir que las piernas se muevan. La rodilla es una articulación, la parte del sistema esquelético que conecta los huesos.
Articulaciones
Una articulación es un lugar donde se encuentran dos o más huesos del esqueleto. Con la ayuda de los músculos, las articulaciones funcionan como palancas mecánicas, permitiendo que el cuerpo se mueva con relativamente poca fuerza. Las superficies de los huesos en las articulaciones están cubiertas con una capa lisa de cartílago que reduce la fricción en los puntos de contacto entre los huesos.
Tipos de Articulaciones
Hay tres tipos principales de juntas: inamovibles, parcialmente móviles y móviles.
- Las articulaciones inmóviles no permiten ningún movimiento debido a que los huesos de estas articulaciones se mantienen unidos de forma segura por colágeno denso. Los huesos del cráneo están conectados por articulaciones inamovibles.
- Las juntas parcialmente móviles permiten un movimiento muy limitado. Los huesos en estas articulaciones se mantienen en su lugar por el cartílago. Las costillas y el esternón están conectados por articulaciones parcialmente móviles.
- Las juntas móviles permiten el mayor movimiento. Los huesos en estas articulaciones están conectados por ligamentos. Las articulaciones móviles son el tipo de articulaciones más comunes en el cuerpo, por lo que se describen con más detalle a continuación.
Articulaciones Móviles
Las articulaciones móviles también se conocen como articulaciones sinoviales. Esto se debe a que el espacio entre los huesos está lleno de un líquido espeso, llamado líquido sinovial, que amortigua la articulación (ver Figura a continuación).
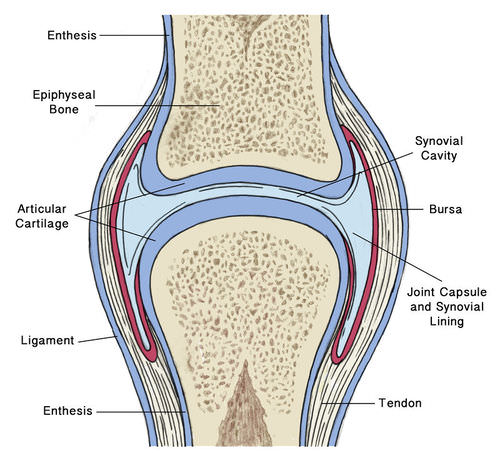 Una articulación móvil o sinovial está protegida y amortiguada por cartílago y líquido sinovial.
Una articulación móvil o sinovial está protegida y amortiguada por cartílago y líquido sinovial. Hay una variedad de tipos de juntas móviles, que se ilustran en la Figura a continuación. Las articulaciones se clasifican por cómo se mueven. Por ejemplo, una articulación de rótula, como el hombro, tiene el mayor rango de movimiento, permitiendo el movimiento en varias direcciones. Otras articulaciones móviles, incluidas las articulaciones de bisagra como la rodilla, permiten menos movimiento.
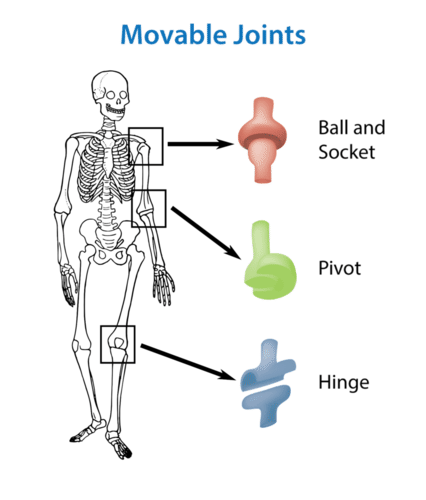
Tipos de Articulaciones Móviles en el Esqueleto Humano. Las juntas móviles pueden moverse de diversas maneras. Intente mover cada una de las articulaciones indicadas en el diagrama. ¿Se puede decir en qué se diferencian sus movimientos? Otras articulaciones en el esqueleto humano que no se representan aquí incluyen articulaciones de silla de montar, elipsoides y planas.
Resumen
- Las articulaciones son lugares donde se encuentran dos o más huesos del esqueleto.
- Con la ayuda de los músculos, las articulaciones permiten que el cuerpo se mueva con relativamente poca fuerza.
- Algunas articulaciones pueden moverse más que otras.
Revisar
- Definir articulación inamovible, y dar un ejemplo de huesos que están conectados por este tipo de articulación.
- Describir una articulación sinovial.
- Describir el movimiento de una articulación de pivote, como el codo.
Explora más
Utilice este recurso para responder a las preguntas que siguen.
Describa el movimiento de las siguientes articulaciones:
- hombro
- rodilla
- cuello
- muñeca
| Imagen | Referencia | Atribuciones |
|
[Figura 1] | Licencia: CC BY-NC |
 |
[Figura 2] | Crédito: Laura Guerin Fuente: Fundación CK-12 Licencia: CC BY-NC 3.0 |
 |
[Figura 3] | Crédito: Zachary Wilson, usando esqueleto por usuario:Gregords/Wikimedia Commons Fuente: Fundación CK-12 (esqueleto disponible en Commons.wikimedia.org/wiki/Archivo:Human_Skeleton_Diagram_Trace.svg) Licencia: CC BY-NC 3. 0; Esqueleto: Dominio Público |