
4.1: Introducción
- Page ID
- 127909

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Si nada cambia con el tiempo, las ecuaciones de Maxwell se convierten en:
\[ \operatorname{curl} \vec{\text{E}}=0 \label{4.1}\]
\[ \operatorname{div} \vec{\text{B}}=0 \label{4.2}\]
\[ \operatorname{curl} \vec{\text{B}}=\mu_{0}\left(\vec{\text{J}}_{\text{f}}+\operatorname{curl} \vec{\text{M}}\right) \label{4.3}\]
\[ \operatorname{div} \vec{\text{E}}=\frac{1}{\epsilon_{0}}\left(\rho_{f}-\operatorname{div} \vec{\text{P}}\right) \label{4.4} \]
El campo magnético se ha desacoplado completamente del campo eléctrico. El campo magnetostático, B, es generado por el flujo de corriente y por una variación espacial de la densidad de magnetización, M. Se acostumbra introducir una función potencial vectorial\(\vec A\) a través de la relación
\[\vec{\text{B}}(\mathbf{r})=\operatorname{curl} \vec{\text{A}}(\mathbf{r}), \label{4.5}\]
donde r es el vector de posición correspondiente a algún punto en el espacio. La divergencia de cualquier curl de un campo vectorial es cero, por lo tanto, la Ecuación (\ ref {4.5}) garantiza automáticamente que la ecuación div\(\vec B\) = 0 será satisfecha. Observe que la ecuación div\(\vec B\) = 0 requiere que el componente normal de sea continuo\(\vec B\) a través de cualquier superficie. Esta conclusión se basa en una aplicación del teorema de Gauss similar a la utilizada en la sección (2.3.2) del capítulo (2). Al sustituir\(\vec B\) en la Ecuación (\ ref {4.3}) se obtiene
\[\operatorname{curl} \operatorname{curl}(\vec{\text{A}})=\mu_{0}\left(\vec{\text{J}}_{\text{f}}+\operatorname{curl}(\vec{\text{M}})\right). \label{4.6}\]
La densidad de corriente libre,\(\vec J\) f, y la función curl (\(\vec M\)) actúan exactamente de la misma manera para generar un campo magnético. Es útil, por lo tanto, definir una densidad de corriente efectiva por la relación
\[\vec{\text{J}_{\text{M}}}=\operatorname{curl}(\vec{\text{M}}), \nonumber \]
y una densidad de corriente total por
\[\vec{\text{J}}_{\text{T}}=\vec{\text{J}_{\text{f}}}+\vec{\text{J}_{\text{M}}}, \label{4.7}\]
La densidad de corriente total es solo la suma de la densidad de corriente debido al movimiento de las cargas y la densidad de corriente efectiva debido a una variación espacial de la densidad de magnetización,\(\vec M\). Con esta notación, la ecuación (\ ref {4.6}) se convierte en
\[\text {curl curl}(\vec{\text{A}})=\mu_{0} \vec{\text{J}}_{\text{T}}. \label{4.8}\]
El operador vectorial curl curl tiene una forma particularmente simple cuando se escribe en coordenadas cartesianas:
\[\operatorname{curl} \operatorname{curl}(\vec{\text{A}})=-\left(\nabla^{2} \text{A}_{\text{x}} \hat{\mathbf{u}}_{\text{x}}+\nabla^{2} \text{A}_{\text{y}} \hat{\mathbf{u}}_{\mathbf{y}}+\nabla^{2} \text{A}_{\text{z}} \hat{\mathbf{u}}_{\mathbf{z}}\right)+\operatorname{grad}(\operatorname{div} \vec{\text{A}}), \label{4.9}\]
donde
\[\nabla^{2}=\frac{\partial^{2}}{\partial \text{x}^{2}}+\frac{\partial^{2}}{\partial \text{y}^{2}}+\frac{\partial^{2}}{\partial \text{z}^{2}} \nonumber \]
es el operador LaPlacian,\(\hat{\mathbf{u}}_{\mathbf{x}}, \hat{\mathbf{u}}_{\mathbf{y}}\) y\(\hat{\mathbf{u}}_{\mathbf{z}}\) son vectores unitarios. Eqn. (\ ref {4.8}) es en realidad tres ecuaciones cuando se escriben en coordenadas cartesianas: una ecuación para cada uno de los tres componentes.
\[\left.-\nabla^{2} \text{A}_{\text{x}}+\frac{\partial}{\partial \text{x}}(\operatorname{div} \vec{\text{A}})=\mu_{0} \text{J}_{\text{T}}\right)_{\text{x}} \nonumber \]
\[\left.-\nabla^{2} \text{A}_{y}+\frac{\partial}{\partial \text{y}}(\operatorname{div} \vec{\text{A}})=\mu_{0} \text{J}_{\text{T}}\right)_{\text{y}} \label{4.10}\]
\[\left.-\nabla^{2} \text{A}_{z}+\frac{\partial}{\partial \text{z}}(\operatorname{div} \vec{\text{A}})=\mu_{0} \text{J}_{\text{T}}\right)_{z} \nonumber\]
En este punto el campo vectorial no se\(\vec A\) ha definido de manera única porque hasta ahora todo lo que se ha especificado es su curl a través del requisito de que curl (\(\vec A\)) =\(\vec B\). Para especificar de manera única un campo vectorial, aparte de un vector constante, es necesario especificar tanto su rizo como su divergencia. Hay muchos campos\(\vec A\) cuyo rizo dan el mismo campo\(\vec B\). Por ejemplo, definamos un nuevo campo a partir del antiguo potencial vectorial\(\vec A\), por medio de la relación
\[\vec{\text{A}^{\prime}}=\vec{\text{A}}+\operatorname{grad}(\text{F}) \label{4.11}\]
donde F es cualquier función escalar de posición. Ambos\(\vec A\) ′ y\(\vec A\) dan exactamente el mismo campo,\(\vec B\), porque el rizo de cualquier gradiente es cero. Esta propiedad del rizo se utilizó en el Capítulo (2) para introducir la función de potencial eléctrico. La arbitrariedad en el potencial vectorial A ilustrado por la Ecuación (\ ref {4.11}) significa que se puede elegir el potencial vectorial para que su divergencia tenga un valor conveniente. Resulta que div (\(\vec A\)) = 0 es una opción conveniente porque hace que las ecuaciones diferenciales (\ ref {4.11}) asuman una forma familiar:
\[\left.\nabla^{2} \text{A}_{\text{x}}=-\mu_{0} \text{J}_{\text{T}}\right)_{x}, \nonumber \]
\[\left.\nabla^{2} \text{A}_{\text{y}}=-\mu_{0} \text{J}_{\text{T}}\right)_{y}, \label{4.12} \]
\[\left.\nabla^{2} \text{A}_{z}=-\mu_{0} \text{J}_{\text{T}}\right)_{z}. \nonumber \]
Cada una de estas ecuaciones tiene exactamente la forma como Ecuación (2.2.5) encontrada en el Capítulo (2) para el potencial electrostático. Por lo tanto, las soluciones particulares para Ecuaciones (\ ref {4.12}) se pueden anotar inmediatamente por analogía con la Ecuación (2.2.6) del Capítulo (2):
\ [\ begin {alineado}
&\ text {A} _ {\ text {x}} (\ vec {\ text {R}}) =\ frac {\ mu_ {0}} {4\ pi}\ iiint_ {S p a c e} d\ tau\ frac {\ left. \ text {J} _ {\ text {T}}\ derecha) _ {x} (\ vec {\ text {\ text {r}})} {|\ vec {\ text {\ text {\ text {r}} |}\\
&\ text {A} _ {\ text {y}} (\ vec {\ text {\ text {R}}) =\ frac {\ mu_ {0}} {4\ pi}\ iiint_ {S p a c e} d\ tau\ frac {\ izquierda. \ text {J} _ {\ text {T}}\ derecha) _ {y} (\ vec {\ text {\ text {r}})} {|\ vec {\ text {\ text {\ text {r}} |}\\
&\ text {A} _ {\ text {z}} (\ vec {\ text {\ text {R}}) =\ frac {\ mu_ {0}} {4\ pi}\ iiint_ {S p a c e} d\ tau\ frac {\ izquierda. \ text {J} _ {\ text {T}}\ derecha) _ {z} (\ vec {\ text {r}})} {|\ vec {\ text {\ text {R}} -\ vec {\ text {r}} |}
\ end {alineado}\]
donde d\(\tau\) es el elemento de volumen.
Pero estas ecuaciones son solo los tres componentes cartesianos de una sola ecuación vectorial
\[\vec{\text{A}}(\vec{\text{R}})=\frac{\mu_{0}}{4 \pi} \iiint_{S p a c e} d \tau \frac{\left(\vec{\text{J}}_{\text{f}}+\operatorname{curl}(\vec{\text{M}})\right)}{|\vec{\text{R}}-\vec{\text{r}}|}. \label{4.13}\]
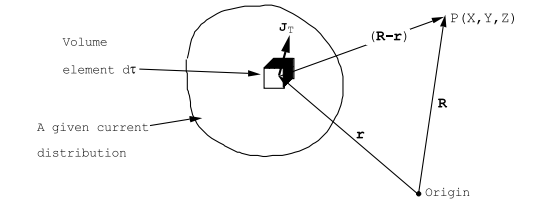
Es instructivo reescribir esta ecuación explícitamente en términos de las coordenadas que especifican el punto de observación,\(\vec{\text{R}}=\text{X} \hat{\text{u}}_{x}+\text{Y} \hat{\text{u}}_{y}+\text{Z} \hat{\text{u}}_{z}\) y las coordenadas que especifican la posición del elemento fuente de volumen\(\vec{\text{r}}=\text{x} \hat{\text{u}}_{x}+\text{y} \hat{\text{u}}_{y}+\text{z} \hat{\text{u}}_{z}\), ver Figura (4.1.1):
\[\vec{\text{A}}(\text{X}, \text{Y}, \text{Z})=\frac{\mu_{0}}{4 \pi} \int \int \int_{S p a c e} d x d y d z \frac{\vec{\text{J}}_{\text{T}}(x, y, z)}{\sqrt{(\text{X}-\text{x})^{2}+(\text{Y}-\text{y})^{2}+(\text{Z}-\text{z})^{2}}}. \label{4.14} \]
La solución particular, Ecuación (\ ref {4.14}), corresponde a la elección div (\(\vec A\)) = 0.
Derivadas de los componentes de\(\vec A\) con respecto a las coordenadas de campo (X, Y, Z) se pueden calcular usando la Ecuación (\ ref {4.14}) diferenciando bajo el signo integral. Por ejemplo,
\[\frac{\partial \text{A}_{\text{x}}}{\partial \text{Y}}=-\frac{\mu_{0}}{4 \pi} \int \int \int_{S p a c e} d x d y d z \frac{\left.\text{J}_{\text{T}}\right)_{x}(x, y, z)(\text{Y}-\text{y})}{\left[(\text{X}-\text{x})^{2}+(\text{Y}-\text{y})^{2}+(\text{Z}-\text{z})^{2}\right]^{3 / 2}}. \nonumber \]
Al llevar a cabo las diferenciaciones término por término se puede demostrar que
\[\vec{\text{B}}(\vec{\text{R}})=\operatorname{curl}(\vec{\text{A}})=\frac{\mu_{0}}{4 \pi} \int \int \int_{S p a c e} d \tau \frac{(\vec{\text{J}} \times(\vec{\text{R}}-\vec{\text{r}}))}{|\vec{\text{R}}-\vec{\text{r}}|^{3}}, \label{4.15}\]
donde d\(\tau\) es el elemento de volumen.