
4.4: Una segunda aproximación a la magnetostática
- Page ID
- 127920

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Cuando se pueden descuidar las variaciones de tiempo de los términos fuente, hemos visto que las ecuaciones de Maxwell para el campo magnetostático se convierten en
\[\operatorname{div}(\overrightarrow{\mathrm{B}})=0 \label{4.31}\]
\[\operatorname{curl}(\overrightarrow{\mathrm{B}})=\mu_{0}\left(\overrightarrow{\mathrm{J}}_{f}+\operatorname{curl}(\overrightarrow{\mathrm{M}})\right). \label{4.32}\]
El vector auxilar\(\vec H\) se introdujo en el capítulo (1), sección (1.4), a través de la relación
\[\overrightarrow{\mathrm{B}}=\mu_{0}(\overrightarrow{\mathrm{H}}+\overrightarrow{\mathrm{M}}). \label{4.33}\]
Cuando (\ ref {4.33}) se utiliza en (\ ref {4.31}) y (\ ref {4.32}) para reemplazar\(\vec B\) por\(\vec H\) el resultado es
\[\operatorname{curl}(\overrightarrow{\mathrm{H}})=\overrightarrow{\mathrm{J}}_{f} \label{4.34}\]
\[\operatorname{div}(\overrightarrow{\mathrm{H}})=-\operatorname{div}(\overrightarrow{\mathrm{M}}). \label{4.35}\]
Para problemas en los que no hay densidad de corriente libre,\(\vec J\) f, estas ecuaciones se reducen a
\[\operatorname{curl}(\overrightarrow{\mathrm{H}})=0, \label{4.36}\]
\[\operatorname{div}(\overrightarrow{\mathrm{H}})=-\operatorname{div}(\overrightarrow{\mathrm{M}})=\rho_{\mathrm{M}}. \label{4.37}\]
La forma de estas ecuaciones para el campo\(\vec H\) es exactamente la misma que la forma de las ecuaciones de Maxwell para el campo electrostático en ausencia de una densidad de carga libre, es decir. (ver sección 2.1))
\[\operatorname{curl}(\overrightarrow{\mathrm{E}})=0, \nonumber \]
\[\operatorname{div}(\overrightarrow{\mathrm{E}})=-\frac{1}{\epsilon_{0}} \operatorname{div}(\overrightarrow{\mathrm{P}})=\frac{\rho_{b}}{\epsilon_{0}}. \nonumber\]
La analogía entre estas ecuaciones para el campo electrostático y las ecuaciones anteriores para el campo magnético\(\vec H\), en una región libre de corriente sugiere que se\(\vec H\) puede obtener de una función de potencial magnético,\(\mathrm{V}_{\mathrm{M}} ; \overrightarrow{\mathrm{H}}=-\operatorname{grad}\left(\mathrm{V}_{\mathrm{M}}\right)\). Observe que si no hay corrientes libres, CurlH=0, y por lo tanto en ausencia de una densidad de corriente los componentes tangenciales de H deben ser continuos en todas partes. La verdad de esta afirmación puede demostrarse mediante una aplicación del teorema de Stokes, sección (1.3.4). El argumento es el mismo que el utilizado para derivar la Ecuación (2.4.1) que establece que el componente tangencial del campo electrostático debe ser continuo a través de un límite. En el caso electrostático, la continuidad del componente tangencial de E puede garantizarse por el requisito de que la función de potencial electrostático sea continua. En el caso magnetostático equivalente la continuidad del componente tangencial de H está garantizada por el requisito de que la función de potencial magnetostático, V M, sea continua a través de un límite.
La maquinaria que se instaló en el Capítulo (2) para calcular el campo electrostático a partir de una distribución de carga dada puede ser tomada intacta para calcular el campo magnetostático a partir de una distribución dada de “densidad de carga magnética”, ρ M, donde
\[\rho_{M}=-\operatorname{div}(\overrightarrow{\mathrm{M}}). \label{4.38}\]
A partir de ahora se utilizará la Ecuación (\ ref {4.38}) para definir lo que se entiende por el término densidad de carga magnética. No existe una densidad de carga magnética real; hasta la fecha (2004) nadie ha podido descubrir un monopolo magnético, el análogo magnético de una carga eléctrica. Si se descubriera un monopolo magnético tendría las unidades de Amp-metros, y produciría un campo
\[\overrightarrow{\mathrm{H}}=\frac{1}{4 \pi} \frac{\mathrm{q}_{\mathrm{m}}}{\mathrm{r}^{2}}\left(\frac{\overrightarrow{\mathrm{r}}}{\mathrm{r}}\right) \quad \text { Amps / meter }, \nonumber\]
por analogía con el caso electrostático, donde q m es la fuerza de la carga magnética.
Si curl (\(\vec H\)) = 0, es decir, sin densidad de corriente libre, el campo magnético puede escribirse como el gradiente de un potencial escalar magnético, V M:
\[\overrightarrow{\mathrm{H}}=-\operatorname{grad}\left(\mathrm{V}_{\mathrm{M}}\right). \label{4.39}\]
Eqn. (\ ref {4.39}) garantiza que curl (\(\vec H\)) = 0 ya que el curl de un gradiente es siempre cero. Observe que se puede agregar una constante arbitraria al potencial sin cambiar el campo magnético,\(\vec H\). Esta constante suele elegirse para que la expresión de la función potencial sea lo más simple posible. Al sustituir la ecuación (\ ref {4.39}) por la ecuación (\ ref {4.37}) para la divergencia de\(\vec H\) uno obtiene
\[\operatorname{div} \operatorname{grad}\left(\mathrm{V}_{\mathrm{M}}\right)=-\rho_{\mathrm{M}} , \nonumber \]
o
\[\nabla^{2} \mathrm{V}_{\mathrm{M}}=-\rho_{M} . \label{4.40}\]
Por analogía con el caso electrostático, Ecuación (2.2.4), se puede escribir la solución particular para el potencial magnético
\[\mathrm{V}_{\mathrm{M}}(\overrightarrow{\mathrm{R}})=\frac{1}{4 \pi} \iiint_{S p a \infty} \mathrm{d} \mathrm{Vol} \frac{\rho_{M}(\overrightarrow{\mathrm{r}})}{|\overrightarrow{\mathrm{R}}-\overrightarrow{\mathrm{r}}|}. \label{4.41}\]
En la aplicación de la Ecuación (\ ref {4.41}) hay que recordar que una discontinuidad en el componente normal de la magnetización\(\vec M\),, producirá una densidad superficial de cargas magnéticas al igual que una discontinuidad en el componente normal del momento dipolo eléctrico,\(\vec P\), produce una superficie densidad de cargas eléctricas ligadas, Capítulo (2), sección (2.3.3). La densidad de carga superficial magnética contribuye al potencial magnético, V M (\(vec R\)), y debe incluirse en la Ecuación (\ ref {4.41}) como una integral superficial. A menudo es más fácil calcular los campos generados por una configuración dada de densidad de magnetización por medio del potencial escalar magnético que usar la densidad de corriente equivalente,\(\vec J\) f = curl (\(\vec M\)), y la ley generalizada de Biot-Savart, Ecuación (4.1.15). A continuación se muestran ejemplos de distribuciones de campo magnético calculadas a partir de distribuciones de magnetización dadas usando el potencial escalar magnético.
4.4.1 Una Varilla Infinitamente Larga Imantada Uniformamente.
Ver Figura (4.3.11). Para este caso div (\(\vec M\)) = 0 en todas partes, de manera que ρ M = 0 en todas partes. No hay densidades de carga superficial porque no hay discontinuidades en el componente normal de\(\vec M\). Esto significa que el potencial magnético debe ser independiente de la posición, ver Ecuación (\ ref {4.41}), y por lo tanto
\[\overrightarrow{\mathrm{H}}=-\operatorname{grad}\left(\mathrm{V}_{\mathrm{M} 1}\right)=0. \nonumber \]
Pero por definición
\[\overrightarrow{\mathrm{H}}=\left(\frac{\overrightarrow{\mathrm{B}}}{\mu_{0}}-\overrightarrow{\mathrm{M}}\right) , \nonumber \]
por lo tanto si\(\vec H\) = 0 se deduce que\(\vec B\) = µ 0\(\vec M\) de acuerdo con la Ecuación (4.3.11) que se obtuvo anteriormente utilizando la ley de Biot y Savart ;( ver sección (4.3.7) anterior).
4.4.2 Un Disco Delgado Magnetizado Uniformamente a lo largo de su Eje.
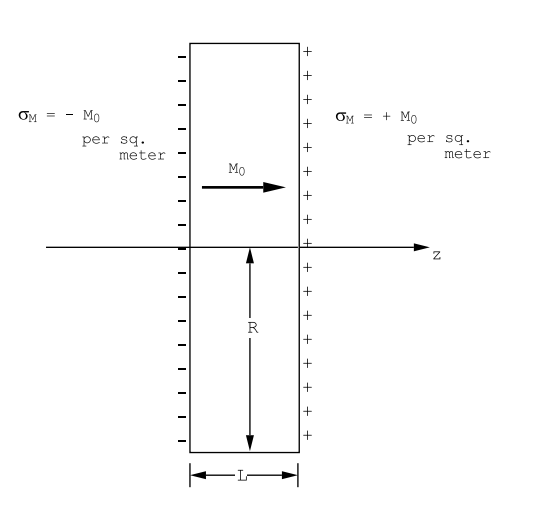
Consideremos un disco de radio R metros y que tenga un espesor de L metros, que esté uniformemente magnetizado paralelo a su eje como se muestra en la Figura (4.4.12); M z = M 0. La discontinuidad en el componente normal de la magnetización en las superficies delantera y trasera produce una densidad de carga magnética superficial dada por σ M = +M 0 por m 2 en la superficie frontal y σ M = −M 0 por m 2 en la superficie trasera. Estas densidades de carga magnética producen un campo magnético a lo largo del eje del disco que se puede obtener a partir del potencial escalar, V M, calculado usando la Ecuación (\ ref {4.41}), donde, para este ejemplo, la integral de volumen se reduce a una integral de superficie. El campo\(\vec H\) así calculado puede ser utilizado para calcular a\(\vec B\) lo largo del eje: el resultado viene dado por la Ecuación (4.3.12) de la sección (4.3.8).
Si (R/L) ≫ 1 la configuración de cargas ilustrada en la Figura (4.4.12) es el análogo magnético del problema electrostático de doble capa, sección (2.7.1) ejemplo (4), Figuras (2.7.9) y (2.7.10). Por analogía con la doble capa electrostática, se puede deducir inmediatamente que fuera del disco el campo magnético\(\vec H\) es cero, pero dentro del disco H z = −M 0. De la definición\(\overrightarrow{\mathrm{B}}=\mu_{0}(\overrightarrow{\mathrm{H}}+\overrightarrow{\mathrm{M}})\) esto significa que, para un disco que tiene un radio infinito, el campo\(\vec B\) es cero tanto dentro como fuera del disco. Esta conclusión concuerda con la Ecuación (4.3.12) en la que el campo\(\vec B\) se calculó a lo largo del eje a partir de la densidad de corriente superficial equivalente en el borde del disco. Observe que el componente normal de\(\vec B\) es continuo a través de la interfaz entre el exterior y el interior del imán. Es una consecuencia general de la ecuación de Maxwell div (\(\vec B\)) = 0 que el componente normal de B debe ser continuo a través de cualquier interfaz.
4.4.3 Un elipsoide uniformemente magnetizado.
Los resultados de la sección (2.7.4) para un elipsoide uniformemente polarizado pueden ser asumidos para el caso magnético debido a la similitud entre las ecuaciones para el campo electrostático\(\vec E\),, y las del campo magnético\(\vec H\), en una región libre de corriente. Considere el elipsoide cuya superficie se describe por
\[\left(\frac{x}{a}\right)^{2}+\left(\frac{y}{b}\right)^{2}+\left(\frac{z}{c}\right)^{2}=1. \nonumber \]
Deje que los componentes de la magnetización en el sistema de ejes principales sean M x, M y, M z. Existen coeficientes de desmagnetización, N \(\alpha\), de tal manera que el campo\(\vec H\) dentro del elipsoide es uniforme con
\ [\ begin {array} {l}
\ mathrm {H} _ {\ mathrm {x}} =-\ mathrm {N} _ {\ mathrm {x}}\ mathrm {M} _ {\ mathrm {x}},\
\ mathrm {H} _ {\ mathrm {y}} =-\ mathrm {N} _ {\ mathrm {y}}\ mathrm rm {M} _ {\ mathrm {y}},\
\ mathrm {H} _ {\ mathrm {z}} =-\ mathrm {N} _ {\ mathrm {z}}\ mathrm {M} _ {\ mathrm {z}}.
\ end {array}\ label {4.42}\]
Además, los coeficientes de desmagnetización satisfacen la regla de suma
\[\mathrm{N}_{\mathrm{x}}+\mathrm{N}_{\mathrm{y}}+\mathrm{N}_{\mathrm{z}}=1. \label{4.43}\]
Las ecuaciones (\ ref {4.42}) y (\ ref {4.43}) son los análogos magnéticos de eqns, (2.7.5) y (2.7.6) para un elipsoide uniformemente polarizado en el caso electrostático. Los factores desmagnetizantes para límites degenerados simples del elipsoide de revolución se pueden deducir inmediatamente de los argumentos de regla de suma y simetría, al igual que para el caso electrostático:
(1) Una esfera uniformemente magnetizada: N x = N y = N z = 1/3.
(2) Un cilindro largo magnetizado transversal a su eje. En este caso el factor de desmagnetización para el eje largo, digamos el eje z, es cero, es decir. N z = 0. Por lo tanto, dado que los otros dos factores desmagnetizantes son iguales, uno debe tener N x = N y = 1/2.
(3) Un disco plano que tiene un radio muy grande y magnetizado a lo largo de su eje. En el límite del radio infinito los factores de desmagnetización en plano van a cero, y por lo tanto a partir de la regla de suma N z = 1.
Para el elipsoide general los factores desmagnetizantes están dados por las Ecuaciones (2.7.11), y para los elipsoides de revolución por las Ecuaciones (2.7.7 y 2.7.9).
El campo magnético\(\vec H\) fuera de un elipsoide uniformemente magnetizado generalmente no es uniforme aunque el campo\(\vec H\) dentro del elipsoide sea uniforme. Las expresiones analíticas para el campo H, y por lo tanto también para el campo B, están disponibles pero son complicadas y se escriben usando sistemas de coordenadas elípticas generalizadas. Véase Teoría Electromagnética por J.A. Stratton, McGraw-Hill, N.Y., 1941, secciones 3.25 a 3.27.
4.4.4 Un dipolo de punto magnético.
Por analogía con el caso electrostático, el campo magnético alrededor de un dipolo magnético puntual se puede obtener a partir de una función de potencial magnético de la forma
\[\text{V}_{\text{M}}=\frac{1}{4 \pi}\left(\frac{\vec{\text{m}} \cdot \vec{\text{r}}}{\text{r}^{3}}\right). \label{4.44}\]
Esta función potencial da el campo magnético
\[\vec{\text{H}}(\vec{\text{r}})=\frac{1}{4 \pi}\left(\frac{3[\vec{\text{m}} \cdot \vec{\text{r}}] \vec{\text{r}}}{\text{r}^{5}}-\frac{\vec{\text{m}}}{\text{r}^{3}}\right). \label{4.45}\]
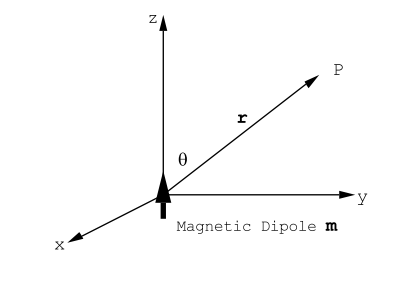
Los componentes de este campo cuando se escriben en el sistema de coordenadas polares esféricas son (ver Figura (4.4.13))
\[\text{H}_{\text{r}}=\frac{2 \text{m}}{4 \pi} \frac{\cos \theta}{\text{r}^{3}}, \nonumber \]
\[\text{H}_{\theta}=\frac{\text{m}}{4 \pi} \frac{\sin \theta}{\text{r}^{3}}, \label{4.46}\]
\[\text{H}_{\phi}=0. \nonumber \]
Los componentes de\(\vec B\) se obtienen a partir de los componentes de\(\vec H\) multiplicando por la permeabilidad del espacio libre, µ 0. Las expresiones resultantes son exactamente las mismas que las obtenidas anteriormente, Ecuación (4.3.10), a partir del potencial vectorial para un dipolo puntual, Ecuación (4.3.9). Así, el campo debido a un dipolo de punto magnético puede calcularse ya sea a partir de un potencial de vector magnético o a partir de un potencial escalar magnético.
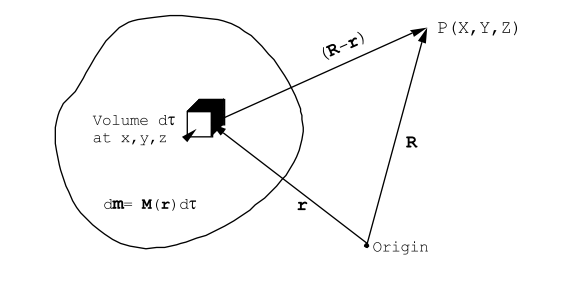
El potencial escalar magnético correspondiente a una distribución dada de la densidad de magnetización se puede calcular por superposición usando el
potencial debido a un dipolo puntual, Ecuación (\ ref {4.44}), ver Figura (4.4.14). El elemento de volumen, d\(\tau\), le ha asociado un momento dipolar magnético\(\vec{\text{m}}=\vec{\text{M}}(\vec{\text{r}}) \text{d} \tau\). Esto contribuye al potencial escalar magnético en el punto P (X, Y, Z) una cantidad dada por
\[\text{dV}_{\text{P}}(\vec{\text{R}})=\frac{1}{4 \pi} \frac{\vec{\text{M}}(\vec{\text{r}}) \cdot[\vec{\text{R}}-\vec{\text{r}}]}{|\vec{\text{R}}-\vec{\text{r}}|^{3}} \text{d} \tau. \label{4.47}\]
Ecuación de suma (\ ref {4.47}) sobre toda la distribución de magnetización para obtener
\[\text{V}_{\text{P}}(\vec{\text{R}})=\frac{1}{4 \pi} \int \int \int_{S p a c e} \text{d} \tau \frac{\vec{\text{M}}(\vec{\text{r}}) \cdot[\vec{\text{R}}-\vec{\text{r}}]}{|\vec{\text{R}}-\vec{\text{r}}|^{3}}. \label{4.48}\]
El potencial calculado usando la Ecuación (\ ref {4.48}) dará los mismos campos que el calculado a partir de la distribución de carga magnética equivalente y la Ecuación (\ ref {4.41}) que se basa en la superposición de los potenciales magnéticos generados por cargas magnéticas puntuales ficticias. La prueba de que el potencial calculado de estas dos formas diferentes es el mismo, salvo, posiblemente para una constante, se basa en la identidad
\[\operatorname{div}\left(\frac{\pi}{\left(\frac{\pi}{1}-\bar{r}\right)}\right)=\frac{\operatorname{div}(\vec{x})}{|\vec{R}-\vec{r}|}+\vec{11} \cdot \operatorname{grad}\left(\frac{1}{|\vec{R}-\vec{r}|}\right). \nonumber \]
El argumento procede exactamente de la misma manera que para el caso electrostático análogo; véase el capítulo (2), sección (2.8).