
6.2: Curvas B-H
- Page ID
- 127913

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
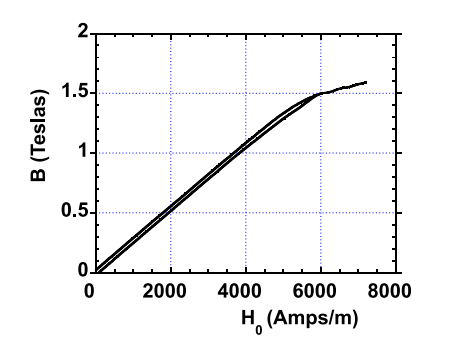
Las propiedades magnéticas de los ferroimanes a una temperatura fija a menudo se describen mediante curvas de inducción magnética B vs H, ver Figura (6.2.3). H es el campo magnético interno: sus fuentes incluyen\(\rho_{m}=-\operatorname{div}(\vec{\text{M}})\) en el cuerpo magnético así como cualquier campo magnético aplicado externamente generado por un sistema de bobinas fuera del cuerpo magnético. \(\vec{\text{B}}=\mu_{0}(\vec{\text{H}}+\vec{\text{M}})\), y en el caso más simple los tres vectores\(\vec B\),\(\vec H\),\(\vec M\) son todos paralelos. Partiendo del estado completamente desmagnetizado (H=0, M=0) la magnetización aumenta con H, y B sigue la curva etiquetada como “curva virgen”. En el estado virgen con H=0, un número igual de dominios tienen magnetización positiva al igual que tienen magnetización negativa para que la magnetización neta sea cero. A medida que H aumenta, esos dominios que tienen una magnetización orientada a lo largo de la dirección del campo aplicado crecen en volumen a expensas de los dominios que tienen una magnetización orientada opuesta a la dirección del campo aplicada. Eventualmente se han eliminado aquellos dominios que tienen un componente de magnetización opuesto a la dirección de H (en el punto marcado A en la Figura (6.2.3)). Sin embargo, el hierro tiene una estructura cristalina cúbica y exhibe la propiedad de que la magnetización prefiere fuertemente orientarse a lo largo de una dirección correspondiente a uno de los tres equivalentes
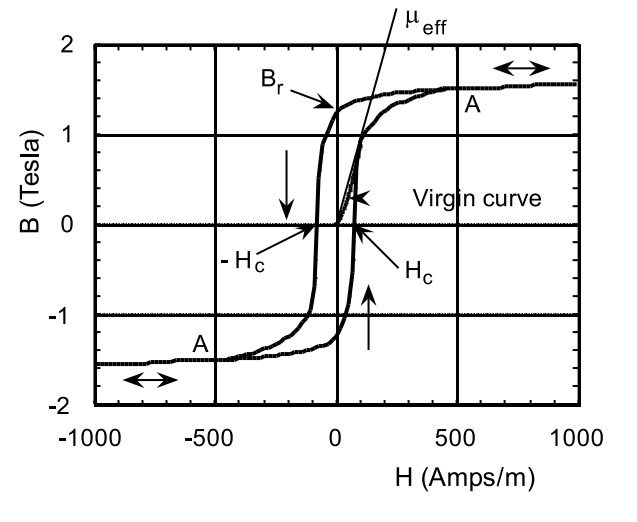
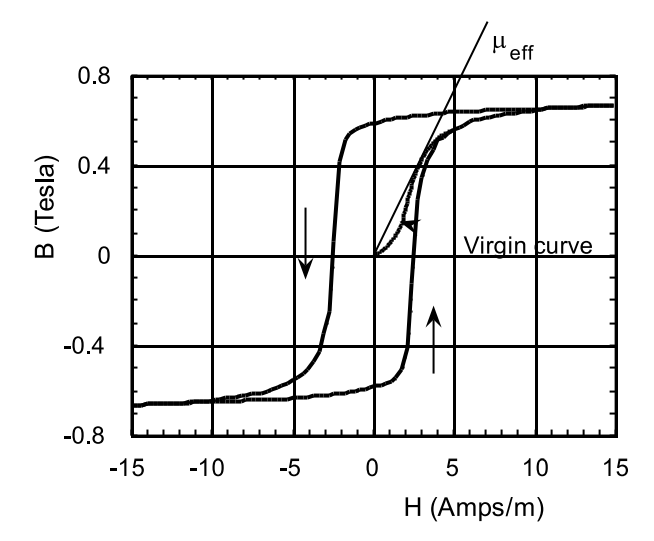
ejes cúbicos. En un material policristalino en un campo correspondiente al punto A de la Figura (6.2.3) las magnetizaciones de dominio, cada una con una intensidad M s por unidad de volumen, están orientadas en ángulos con respecto al campo aplicado que van de 0 a ±90 ◦. A medida que H aumenta estas magnetizaciones de dominio giran gradualmente en la dirección del campo aplicado: durante esta porción del bucle B-H la curva es reversible. En última instancia, la magnetización alcanza el valor de saturación, M s, y la densidad de magnetización se vuelve uniforme en toda la muestra. El campo necesario para lograr el estado saturado en hierro, ∼ 2 × 10 5 Amps/m, es muy grande debido a la gran energía de anisotropía magnetocristalina que resiste la rotación de la magnetización alejándose de un eje cúbico. Los materiales magnéticos muy blandos como Supermalloy (79% Ni, 16% Fe y 5% Mo, ver Tabla (6.2.2)) tienen composiciones correspondientes a una anisotropía magnetocristalina relativamente pequeña. El acercamiento a la saturación en dichos materiales ocurre en campos aplicados mucho menores que para el hierro, ver Figura (6.2.4). También cabe mencionar que un monocristal puro de hierro para el cual las magnetizaciones de dominio están orientadas a lo largo de los ejes cúbicos, Figura (6.1.2), exhibe una permeabilidad efectiva máxima muy grande, ver Tabla (6.2.2), y puede saturarse en campos menores de H= 100 Amps/m. Sin embargo, el hierro policristalino es barato y por lo tanto se utiliza ampliamente en la construcción de electroimanes y grandes generadores.
A la saturación se han eliminado los dominios magnéticos para que la densidad de magnetización sea uniforme en todo el cuerpo y tenga el valor M s. Pero\(\vec{\text{B}}=\mu_{0}(\vec{\text{H}}+\vec{\text{M}})\) así después de la saturación el campo B continúa aumentando con H, aunque la tasa de incremento de B con H se vuelve despreciadamente lenta en comparación con la tasa de aumento que conduce a la saturación; la variación de B con H se vuelve imperceptible en la escala de la Figura (6.2.3). Al reducir el campo H después de haberlo aumentado a valores mayores que los correspondientes al punto A de la Figura (6.2.3), B sigue la curva superior en la Figura (6.2.3) y cuando H=0 la inducción magnética alcanza el valor de campo remanente B = B r. B cae gradualmente a medida que los dominios con una orientación de magnetización invertida se reforman gradualmente en el cuerpo. A medida que H se reduce aún más, B continúa siguiendo la curva superior y eventualmente B alcanza cero a un valor negativo de H llamado campo coercitivo, H c. La reducción continuada de H finalmente conduce a la saturación magnética en la dirección negativa con magnetización uniforme que tiene el valor -M s. A medida que H se incrementa a partir de valores de campo aplicados más negativos que el campo correspondiente al punto A en el tercer cuadrante, el campo B aumenta a lo largo de la curva inferior, la magnetización se vuelve menos negativa a medida que el número de dominios que tienen
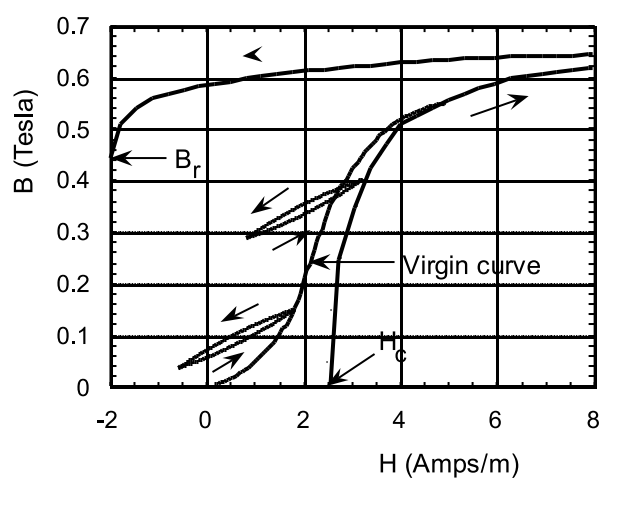
a la magnetización positiva aumenta, y finalmente B se vuelve positivo. En el campo coercitivo H c la inducción magnética es cero; B=0. A valores suficientemente grandes del campo magnético el espécimen vuelve a saturarse con una magnetización uniforme que tiene el valor Ms. Para campos mayores a 500 Amps/m, o para campos menores a -500 Amps/m, la curva de B vs H es reversible. El bucle definido por las curvas superior e inferior en la Figura (6.2.3) se denomina bucle de histéresis mayor. De inmediato surgen dos preguntas: (1) ¿Qué sucede si se disminuye H antes de alcanzar el punto A? y (2) ¿Cómo se puede lograr el estado virgen con H=0, M=0 y B=0? Si H se reduce antes de que se haya alcanzado la parte reversible del bucle B-H, el campo B disminuye a lo largo de un bucle de histéresis menor como los mostrados en la Figura (6.2.5). Si se aplica un campo de accionamiento sinusoidal que tiene una amplitud suficiente para conducir el espécimen hacia la parte reversible, el bucle de histéresis, el estado magnético se transporta alrededor del bucle de histéresis desde un extremo en la dirección positiva hasta un extremo en la dirección negativa muchas veces por segundo. Si ahora la amplitud del campo de conducción se reduce lentamente a cero, la curva de histéresis colapsa a cero simétricamente alrededor del origen. El ejemplar se dejará en estado virgen en el que B=M=H=0.
Los parámetros importantes asociados al bucle de histéresis son (1) el campo remanente, B r, (2) el campo coercitivo, H c, y (3) la permeabilidad máxima efectiva definida por la pendiente máxima de la línea recta que une el origen a un punto en la curva de magnetización virgen como se muestra en Cifras (6.2.3, 6.2.4). Hay dos clases principales de materiales ferromagnéticos: ferroimanes blandos y ferroimanes duros. Los materiales magnéticos blandos se caracterizan por valores muy pequeños del campo coercitivo, ver Cuadro (6.2.2). Para tales materiales la dependencia de B sobre H es casi lineal para H < H c, y como aproximación razonable se puede escribir\(\vec{\text{B}}=\mu_{e f f} \vec{\text{H}}\). Es útil para expresar la permeabilidad efectiva como un número adimensional
\[\mu_{e f f}=\mu_{R} \mu_{0} .\nonumber \]
El hierro policristalino puro es un ferroimán blando caracterizado por H c = 60 Amps/m y µ eff = 0.013, o µ R ∼ 10,000. Hay una serie de aleaciones que se comportan casi como ferroimanes perfectamente blandos, ver Tabla (6.2.2).
Los materiales magnéticos duros se caracterizan por grandes valores del campo coercitivo y el campo remanente B r, ver Tabla (6.2.3). Ferroimanes muy duros como aleaciones SmCo, aleaciones NdFeB y ferritas de estroncio pueden describirse mejor en términos de M vs H. La variación de magnetización con campo magnético interno, H, se muestra para una ferrita de bario comercial en la Figura (6.2.6); solo negativa

Tabla\(\PageIndex{2}\): Propiedades magnéticas de algunos materiales magnéticos blandos. B = µ eff (H + M), donde µ eff = µ R µ 0. Un Tesla equivale a 10 KGaUSS y 79 Amps/m equivale a 1 Oersted. El permalloy es una aleación de 78.5% atómico Ni y 21.5% atómico de Fe. Supermalloy está compuesto por 79% atómico Ni, 16 atómico% Fe y 5% atómico Mo.
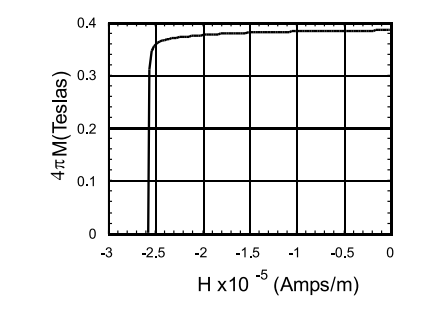
campos internos, H, se muestran porque esta porción de la curva de magnetización es la requerida para aplicaciones prácticas. El bucle de histéresis es casi rectangular, lo que significa que para una buena aproximación la magnetización es independiente del campo H hasta que voltea 180 ◦ en, o cerca, del campo coercitivo. Para materiales muy duros como los enumerados en la Tabla (6.2.3) el concepto de permeabilidad no es muy útil.
¡Advertencia! Los bucles de histéresis comercial generalmente se muestran usando unidades CGS. En el sistema CGS los campos B, M, H tienen todos las mismas unidades, aunque por razones históricas las unidades de B, M se llaman Gauss mientras que las unidades de H se llaman Oersteds. La conversión de unidades CGS a MKS es relativamente simple: 1 Tesla= 10,000 Gauss. 79.6 Amps/m = 1 Oersted. M en Amps/M = [4\(\pi\) M (en Gauss)] × 79.6.
En el sistema CGS\(\vec{\text{B}}=\vec{\text{H}}+4 \pi \vec{\text{M}}\). La permeabilidad relativa es la misma ~ para ambos sistemas.

Tabla\(\PageIndex{3}\): Propiedades magnéticas de algunos materiales comerciales de imanes duros. (Véase, por ejemplo, www.dextermag.com).
6.2.1 Medición del Bucle B-H.
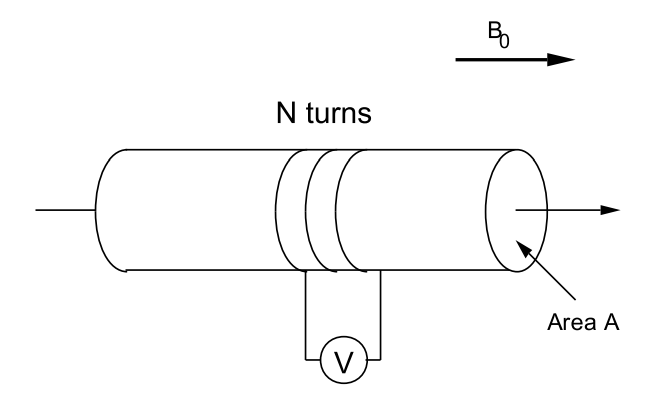
Es relativamente fácil medir la densidad de flujo magnético axial, B, en una muestra. Solo es necesario enrollar unas cuantas vueltas de alambre cerca de una muestra y medir la CEM desarrollada a través de los terminales de la bobina a medida que un campo externo B 0 se cambia con el tiempo, ver Figura (6.2.7). El EMF a través de los terminales de la bobina viene dado por la ley de Faraday:
\[\text{V}(\text{t})=\text{NA} \frac{\text{dB}}{\text{dt}} , \nonumber \]
donde N es el número de vueltas en la bobina y A es el área de la sección transversal del espécimen en m 2. Tras la integración de la señal de voltaje a partir de una condición inicial conocida (B=0 en t=0 digamos) se obtiene B dentro de la muestra correspondiente a un valor particular del campo aplicado H0 = B 0 /µ 0. De esta manera se puede trazar el bucle de histéresis de B vs H 0 ya que el espécimen se satura primero en una dirección y luego en la otra dirección. Desafortunadamente el bucle de histéresis así obtenido no es lo que se quiere: depende más de la geometría del espécimen que de sus propiedades magnéticas intrínsecas.
Lo que se quiere es la variación de B dentro del cilindro con el valor de H dentro del cilindro. Pero H dentro del cilindro es la suma del campo aplicado H 0 = B 0 /µ 0 más la contribución generada por la distribución de densidad de polos magnéticos\(\rho_{M}=-\operatorname{div}(\vec{\text{M}})\). Este campo polar casi cancela el campo aplicado H 0 en un material que tiene una gran permeabilidad. El resultado neto es que la curva de B vs H 0 mide un coeficiente de desmagnetización efectivo para el cuerpo bajo prueba, y no proporciona una medida satisfactoria de una propiedad magnética intrínseca del material del cuerpo de prueba. Para ver cómo se produce esto considera un ejemplo particular: considere una barra cilíndrica cuya longitud es 25 veces su diámetro (25 cm de largo por 1 cm de diámetro, por ejemplo). Que esta barra se caracterice por el bucle de histéresis que se muestra en la Figura (6.2.3). El campo polar dentro de esta barra se puede aproximar por H D = −N z M, donde Nz es el factor de desmagnetización para un elipsoide de revolución que tiene la misma relación longitud/diámetro que el cilindro; M es la densidad de magnetización en la barra. El factor de desmagnetización para un elipsoide de revolución que tiene una relación longitud/diámetro de 25 es N z =0.00467; ver Chpt. (2), Figura (2.7.19) y eqn. (2.5.1). Dentro de la varilla uno tiene B/µ 0 = H+M. Dadas las coordenadas de un punto en el bucle B-H se puede calcular la magnetización, M. Considere el punto en la Figura (6.2.3) B=1.0 Tesla y H=110 Amps/m. Para este punto B/µ 0 = 1.0/ (4\(\pi\) × 10 −7) = 0.796 × 10 6 Amps/m. Así, H es insignificante y M= 0.796 × 10 6 Amps/m. El campo polar resultante es H D = −N z M = −3.72 × 10 3 Amps/m. Para obtener un valor neto H= +110 Amps/m es necesario aplicar un campo H 0 = (3.72×10 3) +110 Amps/m para un campo total H 0 = 3.83×10 3 Amps/m De esta misma manera se puede calcular B vs H 0 para todos los puntos en el bucle de histéresis. Los resultados de dicho cálculo se muestran en la Figura (6.2.8). El resultado más obvio es que B es casi una función lineal del campo aplicado H 0 para H 0 menor que 5800 Amps/m; la pendiente de la línea corresponde a una permeabilidad relativa µ R = 212 (NB. 1/N z = 214). Además, el comportamiento histerético se ha reducido a un valor muy pequeño: aproximadamente 0.05 Tesla en B. Es fácil demostrar que si las propiedades del material son tales que B= µ R µ 0 H entonces para µR grandes uno tiene B= µ 0 H 0 /N z; es decir, una línea recta que tiene una pendiente correspondiente a µ R = 1/N z. El argumento se ejecuta de la siguiente manera:
\ [\ comenzar {alineado}
\ texto {B} &=\ mu\ texto {H} =\ mu_ {0} (\ texto {H} +\ texto {M}),\\
&\ frac {\ mu} {\ mu_ {0}}\ texto {H} =(\ texto {H} +\ texto {M}),
\ end {alineado}\ nonumber\]
por lo
\[\text{M}=\left(\mu_{R}-1\right) \text{H} .\nonumber \]
Dado que el campo polar es H D = −N z M, el campo aplicado debe superar este campo polar y además suministrar el campo H. Por lo tanto, se da el campo aplicado
por
\[\text{H}_{0}=\text{N}_{\text{z}}\left(\mu_{R}-1\right) \text{H}+\text{H}, \nonumber \]
o
\[\text{H}=\frac{\text{H}_{0}}{\left[\text{N}_{\text{z}}\left(\mu_{R}-1\right)+1\right]} , \nonumber \]
y
\[\text{B}=\frac{\mu_{0} \mu_{R} \text{H}_{0}}{\left[\text{N}_{\text{z}}\left(\mu_{R}-1\right)+1\right]} . \nonumber \]
Al dividir por µ R y tomar el límite tal que µ R ≫ 1, se obtiene
\[ \text{B} \cong \mu_{0} \text{H}_{0} / \text{N}_{\text{z}} . \label{6.3}\]
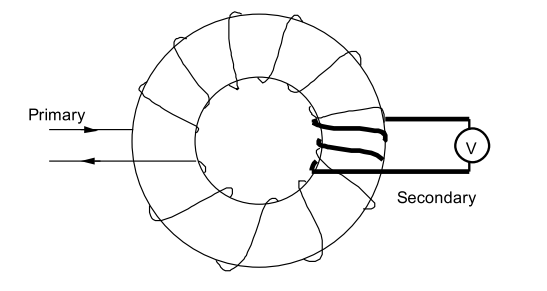
El punto es que para medir la respuesta intrínseca de un material magnético blando es necesario evitar variaciones espaciales en la magnetización que dan lugar a campos de polos magnéticos. Esto se puede hacer usando un espécimen que tenga la topología de un anillo, Figura (6.2.9). Este anillo se puede suministrar con una bobina primaria enrollada uniformemente de N p vueltas utilizadas para generar el campo aplicado, H 0, más una bobina secundaria de N vueltas utilizadas para medir la densidad de flujo en la muestra. No hay polos magnéticos si M es uniforme alrededor del anillo, por lo tanto el campo en el material es solo H = N p I/L, donde I es la corriente de la bobina primaria en amperios y L es la longitud en metros medida a lo largo de la línea central del anillo. El campo B se puede calcular a partir de la emf desarrollada a través de los devanados secundarios a medida que se cambia la corriente primaria; de acuerdo con la ley de Faraday
\[\text{V}=\text{N}_{\text{s}} \text{A}(\text{dB} / \text{dt}) , \nonumber \]
donde A es el área de la sección transversal del anillo.