
10.8: Motores Rotativos
- Page ID
- 131687

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
La mayoría de los motores reales, por supuesto, son motores rotativos, aunque todavía se aplican todos los principios descritos para nuestro motor lineal altamente idealizado de la Sección 10.7.
La corriente se alimenta a una bobina (conocida como la armadura) a través de un conmutador de anillo dividido y la bobina, por lo tanto, desarrolla un momento magnético. La bobina se encuentra en un campo magnético, y por lo tanto experimenta un par. (Figura X.5) La bobina gira y pronto su vector de momento magnético será paralelo al campo y no habría más torque —salvo que, en ese instante, el conmutador de anillo dividido invierte la dirección de la corriente en la bobina, y por lo tanto invierte la dirección del momento magnético. Así la bobina continúa girando hasta que, medio periodo después, su nuevo momento magnético vuelve a alinearse con el campo magnético, y el conmutador vuelve a revertir la dirección del momento.
Al igual que en el caso del motor lineal, la bobina alcanza una velocidad angular máxima, la cual depende de la carga mecánica (esta vez un par) y la relación entre la velocidad angular máxima y el par es la característica de rendimiento del motor.
Además, al igual que con un generador, puede haber varias bobinas (con un número correspondiente de secciones en el conmutador), y también es posible diseñar motores en los que la armadura sea el estator y el imán el rotor —pero no estoy particularmente informado sobre los diseños de ingeniería detallada de motores reales— salvo que todas ellas dependen de los mismos principios científicos.
En todo lo anterior, se ha supuesto que el campo magnético es constante, como si fuera producido por un imán permanente. En motores reales, el campo generalmente es producido por un electroimán. (Algunos tipos de hierro conservan su magnetismo permanentemente a menos que se desmagnetizen deliberadamente. Otros se magnetizan solo cuando se colocan en un campo magnético fuerte como el producido por un solenoide, y pierden la mayor parte de su magnetización tan pronto como se elimina el campo magnetizante).
Las bobinas de campo pueden enrollarse en serie con la bobina de armadura (un motor enrollado en serie) o en paralelo con ella (un motor enrollado en derivación), o incluso parcialmente en serie y parcialmente en paralelo (un motor de bobinado compuesto). Cada diseño tiene su propia característica de rendimiento, dependiendo del uso para el que se destine.
Con una sola bobina que gira en un campo magnético, la retroCEM inducida varía periódicamente, siendo el valor promedio, como hemos visto,\(2NAB \omega / \pi\). En la práctica, la bobina puede enrollarse alrededor de muchas ranuras colocadas alrededor del perímetro de un núcleo cilíndrico cada pocos grados, y hay un número correspondiente de secciones en el colector de anillo dividido. La contraCEM es entonces menos variable que con una sola bobina y, aunque la fórmula ya no\(2NAB \omega / \pi\) es apropiada, la contraCEM sigue siendo proporcional a\(B \omega\). Podemos escribir la media de retorno EMF como\(KB\omega\), donde la constante del motor\(K\) depende de la geometría detallada de un diseño en particular.
Motores enrollados en derivación
En el motor de derivación, la bobina de campo se enrolla en paralelo a la bobina de armadura. En este caso, la contra-EMF generada en la armadura no afecta la corriente en la bobina de campo, por lo que el motor opera más bien como se describió anteriormente para un campo constante. Es decir, la característica de rendimiento del motor, dando la velocidad angular de equilibrio en términos de la carga mecánica (par,\(\tau\)) viene dada por
\[\label{10.8.1}\omega=\frac{E}{KB}-\frac{R}{(KB)^2}\tau .\]
Aquí,\(R\) está la resistencia de la armadura. En la práctica, puede haber una resistencia variable (reóstato) en serie con la bobina de campo, de manera que la corriente a través de la bobina de campo —y por lo tanto la intensidad de campo— se puede cambiar.
Motores serie-enrollados
Motor Serie-Wound. La bobina de campo se enrolla en serie con la armadura, y la característica de rendimiento del motor es bastante diferente a la del motor enrollado en derivación. Si el núcleo magnético no se satura, entonces, a una aproximación lineal, el campo es proporcional a la corriente, y la FEM posterior es proporcional al producto de la corriente\(I\) y la velocidad\(\omega\) angular, así que digamos que la FEM posterior es\(kI\omega\). Entonces tenemos
\[\label{10.8.2}E-kI\omega = IR,\]
donde\(E\) está el EMF aplicado externamente (de una batería, por ejemplo) y\(R\) es la resistencia total de la bobina de campo más la armadura.
Multiplica ambos lados por\(I\):
\[\label{10.8.3}EI-kI^2\omega = I^2 R.\]
El término\(EI\) es la potencia suministrada por la batería y\(I^2 R\) es la potencia disipada como calor. Así es la velocidad de hacer trabajo mecánico\(kI^2\omega\), lo que demuestra que el par ejercido por el motor es\(\tau = kI^2\). Si ahora\(\sqrt{\tau / k}\) sustituimos\(I\) en la Ecuación\ ref {10.8.2}, obtenemos la característica de rendimiento del motor, es decir, la relación entre\(\omega \text{ and }\tau\):
\[\label{10.8.4}\omega = \frac{E}{\sqrt{k\tau}}-\frac{R}{k}.\]
En la Figura X.8 se muestran las características de rendimiento, en unidades arbitrarias, para motores de derivación y enrollados en serie, con base en nuestro análisis lineal, que asume en ambos casos la ausencia de saturación del núcleo de hierro electromagnético. El par máximo posible en ambos casos es el par que hace\(\omega = 0\) en la característica de rendimiento correspondiente, es decir,\(KBE/R\) para el motor de derivación y\(kE^2 /R\) para el motor de bobinado en serie. Este último va al infinito para carga cero. Esto no sucede en la práctica, porque hemos hecho algunas suposiciones que no son reales (como no hay saturación del núcleo magnético, y además nunca puede haber literalmente carga cero), pero sin embargo el análisis es suficiente para mostrar las características generales de los dos tipos.
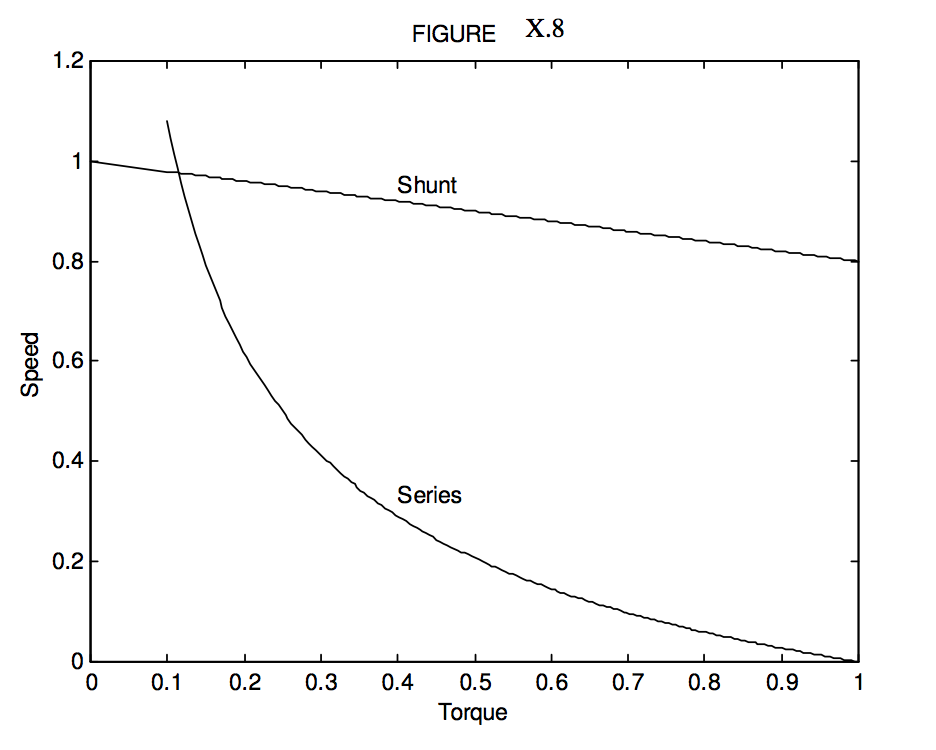
\(\text{FIGURE X.8}\)
Las características de los dos pueden combinarse en un motor de bobinado compuesto, dependiendo de la aplicación prevista. Por ejemplo, una grabadora requiere velocidad constante, mientras que un arrancador de automóvil requiere un par de arranque alto.