
2.3: Ecuaciones, Ondas y Polarización de Maxwell en el Dominio de la Frecuencia
- Page ID
- 125864

Ondas sinusoidales
Los sistemas lineales se caracterizan fácilmente por la magnitud y fase de cada salida en función de la frecuencia a la que se estimula sinusoidalmente la entrada. Esta caracterización simple es suficiente porque sinusoides de diferentes frecuencias pueden superponerse para construir cualquier forma de onda de entrada arbitraria 5, y la salida de un sistema lineal es la superposición de sus respuestas a cada entrada superpuesta. Los sistemas con múltiples entradas y salidas se pueden caracterizar de la misma manera. Los sistemas no lineales son más difíciles de caracterizar porque sus frecuencias de salida generalmente incluyen armónicos de sus entradas.
5 El par de transformada de Fourier (10.4.17) y (10.4.18) relacionan formas de onda de pulso arbitrarias h (t) con sus espectros correspondientes H (f), donde cada frecuencia f tiene su propia magnitud y fase representadas por H (f).
Afortunadamente el espacio libre es un sistema lineal, y por lo tanto se caracteriza completamente por su respuesta a las ondas planas sinusoidales. Por ejemplo, la onda plana uniforme polarizada x de propagación z arbitraria de (2.2.9) y la Figura 2.2.1 podría ser sinusoidal y estar representada por:
\[ \overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{o}} \cos [\mathrm{k}(\mathrm{z}-\mathrm{ct})]\]
\[\overline{\mathrm{H}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{y} \sqrt{\varepsilon_{\mathrm{o}} / \mu_{\mathrm{o}}} \mathrm{E}_{\mathrm{o}} \cos [\mathrm{k}(\mathrm{z}-\mathrm{ct})] \]
donde la amplitud de onda E o es una constante y el factor k está relacionado con la frecuencia, como se muestra a continuación.
Es más común representar ondas sinusoidales utilizando el argumento (ωt - kz) para que su frecuencia y dependencias espaciales sean más evidentes. La frecuencia angular ω se relaciona simplemente con la frecuencia f [Hz]:
\[ \omega=2 \pi \mathrm{f}\left[\text { radians } \mathrm{s}^{-1}\right] \quad \quad \quad \quad \quad \text{(angular frequency) }\]
y la frecuencia espacial k, a menudo llamada número de onda, se relaciona simplemente con ω y longitud de onda λ [m], que es la longitud de un período en el espacio:
\[ \mathrm{k}=2 \pi / \lambda=\omega / \mathrm{c}\left[\text { radians } \mathrm{m}^{-1}\right] \quad \quad \quad \quad \quad \text{(wave number) }\]
La significancia y dimensiones de ω y k son directamente análogas; son radianes s -1 y radianes m -1, respectivamente.
Por lo tanto, alternativamente podemos representar la onda de (2.3.1) y (2.3.2) como:
\[\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kz})\left[\mathrm{v} \mathrm{m}^{-1}\right] \]
\[\overline{\mathrm{H}}(\mathrm{z}, \mathrm{t})=\hat{y} \sqrt{\varepsilon_{\mathrm{o}} / \mu_{\mathrm{o}}} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kz})\left[\mathrm{A} \mathrm{m}^{-1}\right] \]
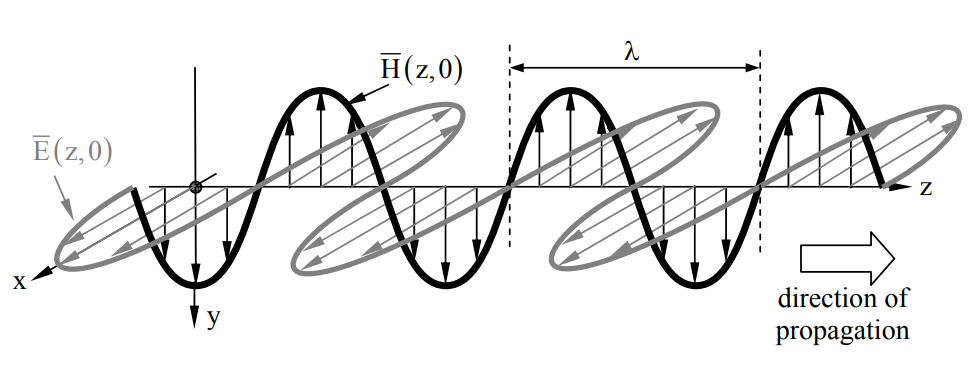
La figura 2.3.1 sugiere la forma de esta ola. Su longitud de onda es λ, la longitud de un ciclo, donde:
\[\lambda=\mathrm{c} / \mathrm{f}[\mathrm{m}] \quad\quad\quad\quad\quad \text{(wavelength)} \]
La figura ilustra cómo estos campos eléctricos y magnéticos están en fase pero ortogonales entre sí y a la dirección de propagación. Cuando el argumento (ωt — kz) es igual a cero, los campos son máximos, consistentes con cos (ωt - kz).
Esta notación facilita la caracterización de ondas planas uniformes que se propagan en otras direcciones también. Por ejemplo:
\[\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}+\mathrm{kz}) \quad\quad\quad\quad\quad\text {(x -polarized wave in -z direction)} \]
\[ \overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{y} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kz}) \quad\quad\quad\quad\quad\text {(y -polarized wave in +z direction)}\]
\[\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{y} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kx}) \quad\quad \quad \quad \text { (y-polarized wave in +x direction) } \]
\[\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{z} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}+\mathrm{kx}) \quad \quad \quad \quad \quad \text { (z-polarized wave in -x direction) } \]
Ecuaciones de Maxwell en el dominio complejo-frecuencia
Los campos electromagnéticos se caracterizan comúnmente en el dominio de la frecuencia en términos de sus magnitudes y fases en función de la posición\(\overline r\) para la frecuencia f. Por ejemplo, la\(\hat{x}\) componente de una variación sinusoidal general\(\overline E\) podría ser:
\[ \overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{x}}(\overline{\mathrm{r}}) \cos [\omega \mathrm{t}+\phi(\overline{\mathrm{r}})]\]
Esto podría ser\( \overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{x}} \cos (\omega \mathrm{t}-\mathrm{kz})\) para una onda plana uniforme que se propaga en la dirección +z.
Generalmente es más conveniente expresar fase usando notación compleja (ver Apéndice B). El componente x de la onda de (2.3.12) también se puede representar como:
\[E_{x}(\overline{r}, t)=R_{e}\left\{E_{x}(\overline{r}) e^{j\left(\omega t+\phi_{x}(\overline{r})\right)}\right\}=\hat{x} R_{e}\left\{\underline{E}_{x}(\overline{r}) e^{j \omega t}\right\} \]
donde las partes espaciales y de frecuencia de se\(E_{x}(\overline{r}, t)\) han separado y\(\underline{E}_{\mathbf{x}}(\overline{r})=\left|\underline{E}_{\mathbf{x}}(\overline{r})\right| e^{j \phi_{\mathbf{X}}(\overline{r})}\) se llama fasor. La simplicidad surgirá más adelante cuando omitimos\(\mathrm{R}_{\mathrm{e}}\left\{[ \quad] \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\} \) de nuestras expresiones como “entendidos”, por lo que solo quedan los fasores. El subrayado bajo\(\underline{E}_{x}\) indica no\(\underline{E}_{x}\) es una función del tiempo, sino una cantidad compleja con una parte real y una parte imaginaria, donde:
\[\underline{E}_{\mathbf{x}}(\overline{r})=R_{e}\left\{\underline{E}_{\mathbf{x}}(\overline{r})\right\}+j \mathrm{I}_{m}\left\{\underline{E}_{\mathrm{x}}(\overline{r})\right\}=\left|\underline{E}_{\mathbf{x}}(\overline{r})\right| \mathrm{e}^{j \phi_{\mathbf{x}}(\overline{r})}\]
y\( \phi_{\mathrm{x}}(\mathrm{\overline r})=\tan ^{-1}\left(\operatorname{Im}\left\{\mathrm{\underline{E}}_{\mathrm{x}}(\mathrm{\overline r})\right\} / \operatorname{Re}\left\{\mathrm{\underline{E}}_{\mathrm{x}}(\mathrm{\overline r})\right\}\right)\). Un overlinetor general también puede ser un fasor, por ejemplo\(\overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}})=\hat{x} \mathrm{\underline{E}}_{\mathbf{x}}(\overline{\mathrm{r}})+\hat{y} \underline{\mathrm{E}}_{\mathrm{y}}(\mathrm{\overline r})+\hat{z} \mathrm{\underline{E}}_{\mathrm{z}}(\mathrm{\overline r})\), donde\(\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\mathrm{R}_{\mathrm{e}}\left\{\overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}}) \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}\).
Podemos usar tales fasores para simplificar las ecuaciones de Maxwell. Por ejemplo, podemos expresar la ley de Faraday (2.2.1) como:
\[\nabla \times \mathrm{R}_{\mathrm{e}}\left\{\overline{\mathrm{\underline{E}}}(\overline{r}) \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}=-\partial \mathrm{R}_{\mathrm{e}}\left\{\overline{\mathrm{\underline{B}}}(\mathrm{r}) \mathrm{e}^{\mathrm{j} \omega \dagger}\right\} / \partial \mathrm{t}=\mathrm{R}_{\mathrm{e}}\left\{\nabla \times \overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}}) \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}=\mathrm{R}_{\mathrm{e}}\left\{-\mathrm{j} \omega \overline{\mathrm{\underline{B}}}(\overline{\mathrm{r}}) \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}\]
Las otras ecuaciones de Maxwell pueden transformarse de manera similar, lo que sugiere que la notación\(\mathrm{R}_{\mathrm{e}}\left\{[\quad ] \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}\) puede omitirse y tratarse como se entiende. Por ejemplo, eliminar esta notación redundante de (2.3.15) da como resultado:\(\nabla \times \overline{\mathrm{\underline{E}}}=-\mathrm{j} \omega \overline{\mathrm{\underline{B}}}\). Cualquier solución de problema expresada como un fasor, por ejemplo\(\overline{\underline{E}}(\overline{r})\), puede ser convertida de nuevo en una expresión de dominio de tiempo por el operador\(\mathrm{R}_{\mathrm{e}}\left\{[\quad] \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\} \). Estas omisiones de la notación entendida dan como resultado las ecuaciones complejas o armónicas de Maxwell:
\[ \nabla \times \overline{\mathrm{\underline{E}}}=-\mathrm{j} \omega \overline{\mathrm{\underline{B}}} \quad\quad\quad\quad\quad \text { (Faraday's law) }\]
\[\nabla \times \overline{\underline{H}}=\overline{\underline{J}}+j \omega \overline{\underline{D}} \quad\quad\quad\quad \text{(Ampere’s law) } \]
\[\nabla \bullet \overline{\underline{D}}=\underline{\rho} \quad\quad\quad\quad\quad \text{(Gauss’s law)}\]
\[\nabla \bullet \overline{\underline{B}}=0 \quad\quad\quad\quad\quad \text{(Gauss’s law)} \]
Tenga en cuenta que estas ecuaciones son las mismas que antes [i.e., (2.2.1—4)], excepto que simplemente hemos reemplazado el operador /t por jω y colocado un subrayado debajo de todas las variables, lo que significa que ahora son fasores.
Podemos derivar inmediatamente la ecuación tiempo-armónica para la conservación de la carga (2.1.19) calculando la divergencia de (2.3.17), señalando que\(\nabla \bullet(\nabla \times \overline{\mathrm{A}})=0 \) para cualquiera\(\overline A\), y sustituyendo\(\nabla \bullet \overline{\underline{D}}=\rho \) (2.3.18):
\[\nabla \bullet \overline{\underline{J}}+j \omega \underline{\rho}=0 \]
Ejemplo\(\PageIndex{A}\)
Convierta las siguientes expresiones en sus equivalentes de dominio de tiempo:\(\mathrm{j} \omega \nabla \times \overline{\mathrm{Q}}=\overline{\mathrm{R}} \mathrm{j}\),\( \overline{\mathrm{R}} \mathrm{e}^{-\mathrm{j} \mathrm{k} \mathrm{z}}\), y\(\overline{\underline{E}}=\hat{x} 3+\hat{y} \mathbf{j} 4 \).
Solución
\(-\omega(\nabla \times \overline{\mathrm{Q}}) \sin (\omega \mathrm{t})=-\overline{\mathrm{R}} \sin \omega \mathrm{t}\),\( \overline{\mathrm{R}} \cos (\omega \mathrm{t}-\mathrm{kz})\), y\( 3 \hat{x} \cos \omega \mathrm{t}-4 \hat{y} \sin \omega \mathrm{t}\).
Ejemplo\(\PageIndex{B}\)
Convierte las siguientes expresiones en sus equivalentes complejos de dominio de frecuencia: Acos (ω +t kz) y Bsin (ω +t φ).
Solución
Ae +jkz, y −jBe jφ = −JBCos φ + Bsin φ.
Ondas planas uniformes sinusoidales
Podemos derivar fácilmente de las ecuaciones de Maxwell la ecuación de onda de Helmholtz armónica de tiempo por vacío (2.2.7) sustituyendo jω por /t o, como hicimos antes, tomando el rizo de la ley de Faraday, usando la conocida identidad de overlinetor (2.2.6) y la ley de Gauss,\( \overline{\underline{B}}\) reemplazando\(\mu_{\mathrm{o}} \overline{\underline{\mathrm{H}}} \) y usando Ley de Ampere para sustituir\( \nabla \times \overline{\underline{H}}\). En ambos casos la ecuación de la onda de Helmholtz se convierte en:
\[ \left(\nabla^{2}+\omega^{2} \mu_{\mathrm{o}} \varepsilon_{\mathrm{o}}\right) \overline{\mathrm{\underline{E}}}=0 \quad\quad\quad\quad\quad \text { (wave equation) }\]
Como antes, la solución\( \overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}})\) a la ecuación de onda puede ser cualquier función arbitraria del espacio\((\overline{\mathrm{r}}) \) tal que su segunda derivada espacial\( \left(\nabla^{2} \overline{\mathrm{\underline{E}}}\right)\) sea igual a una constante\(\left(-\omega^{2} \varepsilon_{\mathrm{o}} \mu_{\mathrm{o}}\right) \) multiplicada por esa misma función\( \underline{\mathrm{E}}(\overline{\mathrm{r}})\). Una solución con estas propiedades es la versión armónica de tiempo de la expresión timedomain\(\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{y} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kz}) \):
\[\overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}})=\hat{y} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{-\mathrm{jkz}}\left[\mathrm{v} \mathrm{m}^{-1}\right] \]
Sustituir (2.3.22) en la ecuación de onda (2.3.21) rinde:
\[\left(\left[\partial^{2} / \partial \mathrm{z}^{2}\right]+\omega^{2} \mu_{\mathrm{o}} \varepsilon_{\mathrm{o}}\right) \overline{\mathrm{\underline{E}}}=\left([-\mathrm{jk}]^{2}+\omega^{2} \mu_{\mathrm{o}} \varepsilon_{\mathrm{o}}\right) \overline{\mathrm{\underline{E}}}=0 \]
que se satisface si el número de onda k es:
\[ \mathrm{k}=\omega \sqrt{\mu_{\mathrm{o}} \varepsilon_{\mathrm{o}}}=\frac{\omega}{\mathrm{c}}=\frac{2 \pi \mathrm{f}}{\mathrm{c}}=\frac{2 \pi}{\lambda}\left[\mathrm{radians} \ \mathrm{m}^{-1}\right]\]
Ahora es fácil encontrar el campo magnético que corresponde a (2.3.22) usando la ley de Faraday (2.3.16)\(\overline{\mathrm{\underline{B}}}=\mu_{\mathrm{o}} \overline{\mathrm{\underline{H}}} \), y la definición del operador “×” (2.1.1):
\[\begin{align} \overline{\mathrm{\underline{H}}}(\overline{\mathrm{r}}) &=-\frac{(\nabla \times \overline{\mathrm{\underline{E}}})}{\mathrm{j} \omega \mu_{\mathrm{o}}}=\frac{1}{\mathrm{j} \omega \mu_{\mathrm{o}}} \frac{\hat{x} \partial \mathrm{E}_{\mathrm{y}}}{\partial \mathrm{z}}=-\frac{\hat{x} \mathrm{k} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{-\mathrm{jkz}}}{\omega \mu_{\mathrm{o}}} \\ &=-\hat{x} \frac{1}{\eta_{\mathrm{o}}} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{-\mathrm{jkz}}\left[\mathrm{Am}^{-1}\right] \nonumber \end{align} \]
Como antes,\(\overline{\mathrm{\underline{E}}} \) y\(\overline{\mathrm{\underline{H}}} \) son ortogonales entre sí y a la dirección de propagación, y\(|\overline{\mathrm{\underline{E}}}|=\eta_{\mathrm{o}}|\overline{\mathrm{\underline{H}}}|\).
Como otro ejemplo, considere una onda polarizada z que se propaga en la dirección -x; luego:
\[\overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}})=\hat{z} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{+\mathrm{jkx}}, \ \overline{\mathrm{\underline{H}}}(\overline{\mathrm{r}})=\hat{y} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{\mathrm{jkx}} / \eta_{\mathrm{o}} \]
Es fácil convertir expresiones phasor como (2.3.26) en expresiones de dominio de tiempo. Simplemente dividimos las expresiones fasoras en sus partes reales e imaginarias, y notamos que la parte real varía como cos (ωt - kz) y la parte imaginaria varía como pecado (ωt - kz). Así, los campos en (2.3.22) podrían escribirse en su lugar como una expresión real en el dominio del tiempo:
\[ \overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=\hat{y} \mathrm{E}_{\mathrm{o}} \cos (\omega \mathrm{t}-\mathrm{kz})\]
Si la solución del campo eléctrico hubiera sido en cambio el fasor\( \hat{y}_{j} \mathrm{E}_{\mathrm{o}} \mathrm{e}^{-\mathrm{jkz}}\), la expresión del dominio del tiempo\( \mathrm{R}_{\mathrm{e}}\left\{\overline{\mathrm{\underline{E}}}(\overline{\mathrm{r}}) \mathrm{e}^{\mathrm{j} \omega \mathrm{t}}\right\}\) sería entonces:
\[\overline{\mathrm{E}}(\overline{\mathrm{r}}, \mathrm{t})=-\hat{y} \mathrm{E}_{\mathrm{o}} \sin (\omega \mathrm{t}-\mathrm{kz}) \]
La conversión de fasores complejos en expresiones de dominio temporal, y viceversa, se analiza más a fondo en el Apéndice B.
Polarización de onda
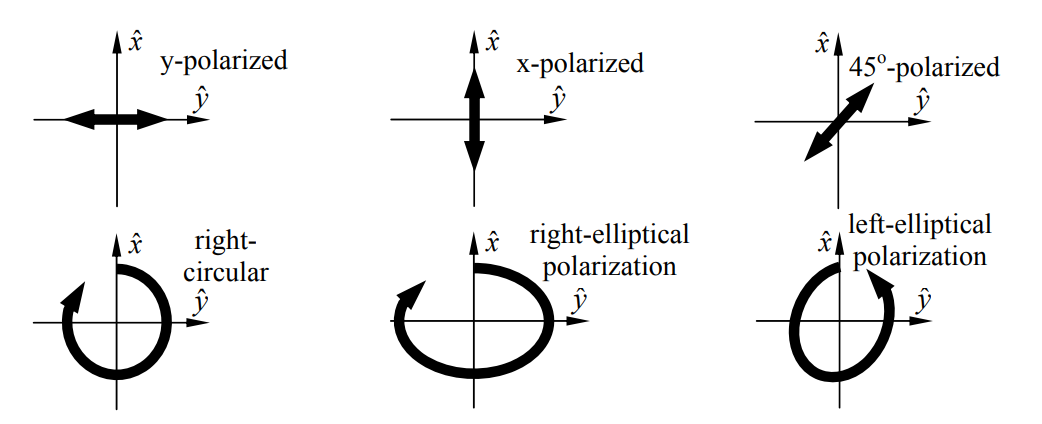
La notación compleja simplifica la representación de la polarización de onda, lo que caracteriza el comportamiento del overlinetor de campo eléctrico sinusoidalmente variable en función del tiempo. Es bastante distinta de la polarización de los medios discutida en la Sección 2.5.3. Anteriormente hemos visto ondas para las cuales el overlinetor eléctrico variable en el tiempo apunta solo en las direcciones ±x, ±y o ±z, correspondientes a la polarización x, y o z, respectivamente. Al superponer tales ondas a la misma frecuencia y propagarse en la misma dirección podemos obtener cualquier otra polarización armónica de tiempo deseada. La polarización lineal resulta cuando el overlinetor eléctrico oscilante apunta solo a lo largo de una sola dirección en el plano perpendicular a la dirección de propagación, mientras que la polarización elíptica resulta cuando los componentes x e y del overlinetor eléctrico están desfasados de modo que la punta de la eléctrica overlinetor traza una elipse en el mismo plano. La polarización circular resulta solo cuando la diferencia de fase entre x e y es de 90 grados y las dos amplitudes son iguales. Estas diversas polarizaciones para\(\hat{z}\) propagación + se representan a continuación en z = 0 en el dominio del tiempo y como fasores, y en la Figura 2.3.2.
\[\overline{\mathrm{E}}(\mathrm{t})=\hat{y} \mathrm{E}_{\mathrm{o}} \cos \omega \mathrm{t} \quad \quad \quad \quad \quad\quad\quad \overline{\mathrm{\underline{E}}}=\hat{y} \mathrm{E}_{\mathrm{o}} \quad \quad \quad \quad \quad\text { (y-polarized) } \]
\[\overline{\mathrm{E}}(\mathrm{t})=\hat{x} \mathrm{E}_{\mathrm{o}} \cos \omega \mathrm{t} \quad \quad\quad\quad\quad \quad\quad\overline{\mathrm{\underline{E}}}=\hat{x} \mathrm{E}_{\mathrm{o}} \quad\quad\quad\quad\quad \text { (x-polarized) } \]
\[ \overline{\mathrm{E}}(\mathrm{t})=(\hat{x}+\hat{y}) \mathrm{E}_{\mathrm{o}} \cos \omega \mathrm{t} \quad\quad\quad\quad \quad \overline{\underline{\mathrm{E}}}=(\hat{x}+\hat{y}) \mathrm{E}_{\mathrm{o}} \quad \quad\quad\quad\quad\left(45^{\circ}\text {-polarized}\right)\]
\[ \overline{\mathrm{E}}(\mathrm{t})=\mathrm{E}_{\mathrm{o}}(\hat{x} \cos \omega \mathrm{t}+\hat{y} \sin \omega \mathrm{t}) \quad \quad\quad \quad\quad \overline{\mathrm{\underline{E}}}=(\hat{x}-\mathrm{j} \hat{y}) \mathrm{E}_{\mathrm{o}} \quad \quad\quad \quad\quad \text { (right-circular) }\]
\[ \overline{\mathrm{E}}(\mathrm{t})=\mathrm{E}_{\mathrm{o}}(\hat{x} \cos \omega \mathrm{t}+1.5 \hat{y} \sin \omega \mathrm{t}) \quad \quad\quad\quad\quad \overline{\mathrm{\underline{E}}}=(\hat{x}-1.5 \mathrm{j} \hat{y}) \mathrm{E}_{\mathrm{o}} \quad\quad\quad\quad\quad \text { (right-elliptical) }\]
\[ \overline{\mathrm{E}}(\mathrm{t})=\mathrm{E}_{\mathrm{o}}\left[\hat{x} \cos \omega \mathrm{t}+\hat{y} \cos \left(\omega \mathrm{t}+20^{\circ}\right)\right] \quad\quad\quad\quad\quad \overline{\mathrm{\underline{E}}}=\left(\hat{x}+\mathrm{e}^{0.35 \mathrm{j}} \hat{y}\right) \mathrm{E}_{\mathrm{o}} \quad \quad\quad\quad\quad\text { (left-elliptical) }\]
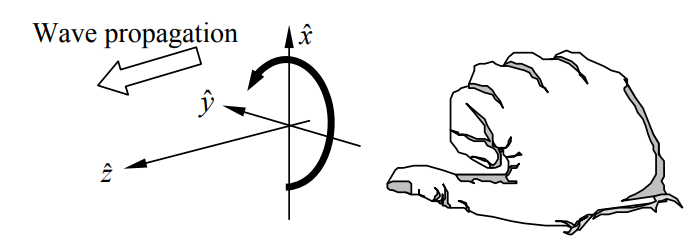
El Instituto de Ingenieros Eléctricos y Electrónicos (IEEE) ha definido la polarización como diestro si el overlinetor eléctrico traza una elipse diestra en el plano x-y para una onda que se propaga en la dirección +z, como se sugiere en la Figura 2.3.3. Es decir, para la polarización diestra los dedos de la derecha circulan en la dirección tomada por el overlinetor eléctrico mientras que el pulgar apunta en la dirección de propagación. Esta definición legal es opuesta a la comúnmente utilizada en física, donde esa definición alternativa es consistente con la mano del “tornillo” formado por los loci tridimensionales instantáneos de las puntas de los sobrelineadores eléctricos que comprenden una onda.
Ejemplo\(\PageIndex{C}\)
Si\(\overline{\mathrm{\underline{E}}}=\overline{\mathrm{\underline{E}}}_{\mathrm{o}} \mathrm{e}^{-\mathrm{jkz}} \), qué polarizaciones corresponden a:\(\overline{\mathrm{\underline{E}}}_{\mathrm{o}}=\hat{y} \),\(\overline{\mathrm{\underline{E}}}_{\mathrm{o}}=\hat{x}+2 \hat{y} \), y\( \overline{\mathrm{\underline{E}}}_{\mathrm{o}}=\hat{x}-\mathrm{j} \hat{y} ?\)?
Solución
polarización y, polarización lineal en ángulo tan -1 2 con relación al plano x-z y polarización circular derecha.