
2.4: Relación entre formas integrales y diferenciales de las ecuaciones de Maxwell
- Page ID
- 125857

Teorema de la divergencia de Gauss
Dos teoremas son muy útiles para relacionar las formas diferencial e integral de las ecuaciones de Maxwell: el teorema de la divergencia de Gauss y el teorema de Stokes. El teorema de divergencia de Gauss (2.1.20) establece que la integral del componente normal de un campo de overlinetor analítico arbitrario\(\overline A \) sobre una superficie S que limita el volumen V es igual a la integral de volumen de\( \nabla \cdot \overline{\mathrm{A}}\) más de V. El teorema se puede derivar rápidamente recordando (2.1.3):
\[\nabla \cdot \overline{A} \equiv \frac{\partial A_{x}}{\partial x}+\frac{\partial A_{y}}{\partial y}+\frac{\partial A_{z}}{\partial z} \]
Por lo tanto,\( \nabla \cdot \overline{A}\) en la posición x o, y o, z o se pueden encontrar usando (2.4.1) en el límite donde Δx, Δy y Δz se acercan a cero:
\ [\ begin {align}
\ nabla\ cdot\ overline {A} =\ lim _ {\ Delta i\ fila derecha 0} &\ izquierda\ {\ izquierda [A_ {x}\ izquierda (x_ {0} +\ Delta x/2\ derecha) -A_ {x}\ izquierda (x_ {0} -\ Delta x/2\ derecha)\ derecha]/\ Delta x\ a la derecha. \\
&+\ izquierda [A_ {y}\ izquierda (y_ {0} +\ Delta y/2\ derecha) -A_ {y}\ izquierda (y_ {0} -\ Delta y/2\ derecha)\ derecha]/\ Delta y\ nonumber\\
&\ izquierda. +\ izquierda [A_ {z}\ izquierda (z_ {0} +\ Delta z/2\ derecha) -A_ {z}\ izquierda (z_ {0} -\ Delta z/2\ derecha)\ derecha]/\ Delta z\ derecha\ derecha\}\ nonumber
\ end {align}\]
\ [\ begin {align}
=\ lim _ {\ Delta i\ fila derecha 0} &\ izquierda\ {\ Delta y\ Delta z\ izquierda [A_ {x}\ izquierda (x_ {0} +\ Delta x/2\ derecha) -A_ {x}\ izquierda (x_ {0} -\ Delta x/2\ derecha)\ derecha]\ derecha. \\
&+\ Delta x\ Delta z\ izquierda [A_ {y}\ izquierda (y_ {0} +\ Delta y/2\ derecha) -A_ {y}\ izquierda (y_ {0} -\ Delta y/2\ derecha)\ derecha]\ nonumber\\
&\ izquierda. +\ Delta x\ Delta y\ izquierda [A_ {z}\ izquierda (z_ {0} +\ Delta z/2\ derecha) -A_ {z}\ izquierda (z_ {0} -\ Delta z/2\ derecha)\ derecha]\ derecha\}/\ Delta x\ Delta y\ Delta z\ nonumber
\ final {align}\]
\[ =\lim _{\Delta \mathbf{v} \rightarrow 0}\left\{\oiint_{\mathrm{S}_{\mathrm{c}}} \overline{\mathrm{A}} \bullet \hat{n} \mathrm{da} / \Delta \mathrm{v}\right\}\]
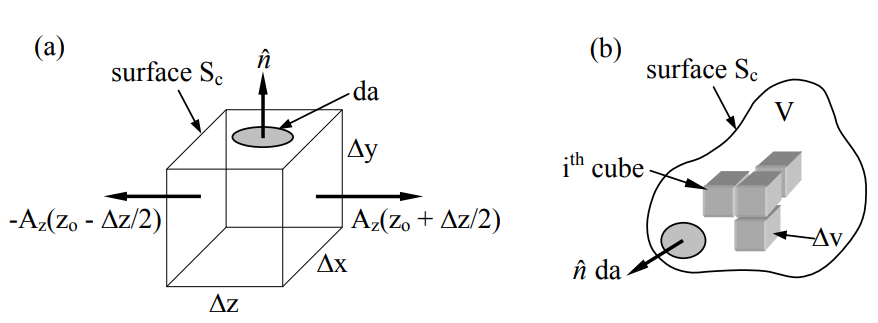
donde\(\hat{n}\) es el overlinetor normal unitario para un cubo incremental de dimensiones Δx, Δy, Δz; da es su área superficial diferencial; S c es su área superficial; y Δv es su volumen, como se sugiere en la Figura 2.4.1 (a).
Ahora podemos apilar un número arbitrario de tales cubos infinitesimales para formar un volumen V como el que se muestra en la Figura 2.4.1 (b). Entonces podemos sumar (2.4.4) sobre todos estos cubos para obtener:
\[ \lim _{\Delta v \rightarrow 0} \sum_{i}(\nabla \bullet \overline{A}) \Delta v_{i}=\lim _{\Delta v \rightarrow 0} \sum_{i}\left\{\oiint_{S_{c}} \overline{A} \bullet \hat{n} d a_{i}\right\}\]
Dado que todas las contribuciones\(\sum_{i}\left\{\oiint_{S} \overline{A} \bullet \hat{n} d a_{i}\right\} \) a las caras cúbicas adyacentes orientadas al interior se cancelan, las únicas contribuciones restantes del lado derecho de (2.4.5) son de la superficie exterior del volumen V. Pasando al límite, obtenemos el teorema de divergencia de Gauss:
\[ \iiint_{V}(\nabla \bullet \overline{A}) d v=\oiint_{S}(\overline{A} \cdot \hat{n}) d a\]
Teorema de Stokes
El teorema de Stokes establece que la integral del rizo de un campo overlinetor sobre una superficie delimitada es igual a la integral de línea de ese campo overlinetor a lo largo del contorno C que limita esa superficie. Su derivación es similar a la del teorema de divergencia de Gauss (Sección 2.4.1), comenzando con la definición del componente z del operador curl [de la Ecuación (2.1.4)]:
\[ (\nabla \times \overline{\mathrm{A}})_{\mathrm{z}} \equiv \hat{z}\left(\frac{\partial \mathrm{A}_{\mathrm{y}}}{\partial \mathrm{x}}-\frac{\partial \mathrm{A}_{\mathrm{x}}}{\partial \mathrm{y}}\right)\]
\ [\ begin {align}
=\ hat {z}\ lim _ {\ Delta x,\ Delta y\ derecha 0} &\ izquierda\ {\ izquierda [A_ {y}\ izquierda (x_ {0} +\ Delta x/2\ derecha) -A_ {y}\ izquierda (x_ {0} -\ Delta x/2\ derecha)\ derecha]/\ Delta x\ derecha. \\
&\ izquierda. -\ izquierda [A_ {x}\ izquierda (y_ {0} +\ Delta y/2\ derecha) -A_ {x}\ izquierda (y_ {0} -\ Delta y/2\ derecha)\ derecha]/\ Delta y\ derecha\}\ nonumber
\ end {align}\]
\ [\ begin {align}
=\ hat {z}\ lim _ {\ Delta x,\ Delta y\ fila derecha 0}\ {&\ Delta y\ izquierda [A_ {y}\ izquierda (x_ {0} +\ Delta x/2\ derecha) -A_ {y}\ izquierda (x_ {0} -\ Delta x/2\ derecha)\ derecha]/\ Delta x Delta\ y\\
&\ izquierda. -\ Delta x\ izquierda [A_ {x}\ izquierda (y_ {0} +\ Delta y/2\ derecha) -A_ {x}\ izquierda (y_ {0} -\ Delta y/2\ derecha)\ derecha]/\ Delta x\ Delta y\ derecha\}\ nonumber
\ end {align}\]
Considere una superficie en el plano x-y, perpendicular a\(\hat{z}\) y\(\hat{n}\), la superficie local normal, como se ilustra en la Figura 2.4.2 (a).
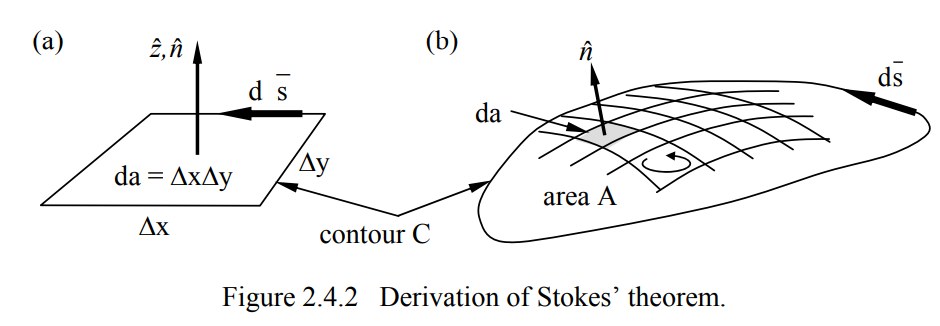
Entonces (2.4.9) aplicado a δXδY se convierte en:
\[\Delta \mathrm{x} \Delta \mathrm{y}(\nabla \times \overline{\mathrm{A}}) \bullet \hat{n}=\oint_{\mathrm{C}} \overline{\mathrm{A}} \bullet \mathrm{d} \overline{\mathrm{s}} \]
donde d\(\overline s\) es una longitud diferencial de overlinetor [m] a lo largo del contorno C delimitando el área incremental definida por ΔxΔy = da. El contorno C es transversal en sentido derecho relativo a\(\hat{n}\). Podemos ensamblar tales áreas infinitesimales para formar superficies de formas arbitrarias y área A, como se sugiere en la Figura 2.4.2 (b). Cuando sumamos (2.4.10) sobre todas estas áreas infinitesimales da, encontramos que todas las contribuciones al lado derecho interior al área A cancelan, dejando solo las contribuciones del contorno C a lo largo del borde de A. Así (2.4.10) se convierte en el teorema de Stokes:
\[ \int \int_{\mathrm{A}}(\nabla \times \overline{\mathrm{A}}) \bullet \hat{n} \mathrm{da}=\oint_{\mathrm{C}} \overline{\mathrm{A}} \cdot \mathrm{d} \overline{\mathrm{s}}\]
donde la relación entre la dirección de integración alrededor del bucle y la orientación de\(\hat{n}\) obedecer la regla de la derecha (si los dedos de la derecha se curvan en la dirección de d\(\overline s\), entonces el pulgar apunta en la dirección\(\hat{n}\)).
Ecuaciones de Maxwell en forma integral
La forma diferencial de las ecuaciones de Maxwell (2.1.5—8) se puede convertir a forma integral usando el teorema de divergencia de Gauss y el teorema de Stokes. La ley de Faraday (2.1.5) es:
\[\nabla \times \overline{\mathrm{E}}=-\frac{\partial \overline{\mathrm{B}}}{\partial \mathrm{t}} \]
Aplicando el teorema de Stokes (2.4.11) a la superficie curva A delimitada por el contorno C, obtenemos:
\[ \iint_{\mathrm{A}}(\nabla \times \overline{\mathrm{E}}) \bullet \hat{n} \mathrm{d} \mathrm{a}=\oint_{\mathrm{C}} \overline{\mathrm{E}} \bullet \mathrm{d} \overline{\mathrm{s}}=-\iint_{\mathrm{A}} \frac{\partial \overline{\mathrm{B}}}{\partial \mathrm{t}} \bullet \hat{n} \mathrm{d} \mathrm{a}\]
Esto se convierte en la forma integral de la ley de Faraday:
\[\oint_{C} \overline{E} \bullet d \overline{s}=-\frac{\partial}{\partial t} \iint_{A} \overline{B} \bullet \hat{n} d a \quad\quad\quad\quad\quad(\text {Faraday's } L a w)\]
Una aplicación similar del teorema de Stokes a la forma diferencial de la ley de Ampere produce su forma integral:
\[ \oint_{\mathrm{C}} \overline{\mathrm{H}} \bullet \mathrm{d} \overline{\mathrm{s}}=\iint_{\mathrm{A}}\left[\overline{\mathrm{J}}+\frac{\partial \overline{\mathrm{D}}}{\partial \mathrm{t}}\right] \bullet \hat{n} \mathrm{d} \mathrm{a} \quad\quad\quad\quad\quad \text { (Ampere's Law) }\]
El teorema de divergencia de Gauss (2.1.20) puede aplicarse de manera similar a las leyes de Gauss para dar su forma integral:
\[\int \int \int_{V}(\nabla \bullet \overline{D}) d v=\int \int \int_{V} \rho d v=\oiint_{A}(\overline{D} \bullet \hat{n}) d a \]
Este procedimiento de conversión arroja así las formas integrales de las leyes de Gauss. Es decir, podemos integrar\( \) y\( \) en las ecuaciones diferenciales sobre la superficie A que limita el volumen V:
\[ \oiint_{\mathrm{A}}(\overline{\mathrm{D}} \bullet \hat{n}) \mathrm{d} \mathrm{a}=\int \int \int_{\mathrm{V}} \rho \mathrm{d} \mathrm{v} \quad\quad\quad\quad\quad\left(\text {Gauss}^{\prime} s \text { Law for charge}\right)\]
\[\oiint_{\mathrm{A}}(\overline{\mathrm{B}} \bullet \hat{n}) \mathrm{d} \mathrm{a}=0 \quad \quad \quad \quad \quad \text{ (Gauss’s Law for } \overline{B}) \]
Finalmente, la conservación de la carga (1.3.19) puede convertirse a forma integral como lo fueron las leyes de Gauss:
\[ \oiint_{\mathrm{A}}(\overline{\mathrm{J}} \bullet \hat{n}) \mathrm{d} \mathrm{a}=-\int \int \int_{\mathrm{V}} \frac{\partial \rho}{\partial \mathrm{t}} \mathrm{d} \mathrm{v} \quad\quad\quad\quad \quad(\text { conservation of charge })\]
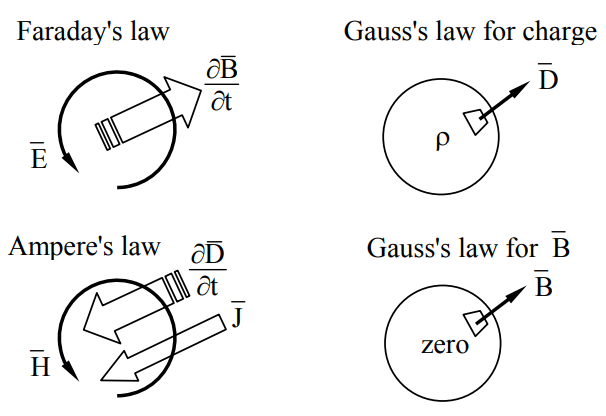
Los cuatro bocetos de las ecuaciones de Maxwell presentados en la Figura 2.4.3 pueden facilitar la memorización; pueden interpretarse en forma diferencial o integral porque capturan la física subyacente.
Ejemplo\(\PageIndex{A}\)
Usando la ley de Gauss, encuentra\(\overline E\) a distancia r de un punto de carga q.
Solución
La simetría esférica del problema requiere\(\overline E\) ser radial, y la ley de Gauss lo exige\( \int_{\mathrm{A}} \varepsilon_{\mathrm{o}} \overline{\mathrm{E}} \bullet \hat{r} \mathrm{d} \mathrm{A}=\int_{\mathrm{V}} \rho \mathrm{d} \mathrm{v}=\mathrm{q}=4 \pi \mathrm{r}^{2} \varepsilon_{\mathrm{o}} \mathrm{E}_{\mathrm{r}}\), entonces\(\overline{\mathrm{E}}=\hat{r} \mathrm{E}_{\mathrm{r}}=\hat{r} \mathrm{q} / 4 \pi \varepsilon_{\mathrm{o}} \mathrm{r}^{2}\).
Ejemplo\(\PageIndex{B}\)
¿Qué es\(\overline H\) a r = 1 cm de una corriente de línea\(\overline I\) =\(\hat{z}\) [amperios] posicionada en r = 0?
Solución
Debido a que la geometría de este problema es cilindricamente simétrica, también lo es la solución. Usando la forma integral de la ley de Ampere (2.4.15) e integrando en sentido derecho alrededor de un círculo de radio r centrado en la corriente y en un plano ortogonal a ella, obtenemos 2\(\pi\) rH = I, así\(\overline H\) =\(\hat{\theta}\) 100/2\(\pi\) [A m -1].