
4.3: Relajación de Campos y Profundidad de la Piel
- Page ID
- 125775

\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
\( \newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\)
( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\id}{\mathrm{id}}\)
\( \newcommand{\Span}{\mathrm{span}}\)
\( \newcommand{\kernel}{\mathrm{null}\,}\)
\( \newcommand{\range}{\mathrm{range}\,}\)
\( \newcommand{\RealPart}{\mathrm{Re}}\)
\( \newcommand{\ImaginaryPart}{\mathrm{Im}}\)
\( \newcommand{\Argument}{\mathrm{Arg}}\)
\( \newcommand{\norm}[1]{\| #1 \|}\)
\( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\)
\( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\AA}{\unicode[.8,0]{x212B}}\)
\( \newcommand{\vectorA}[1]{\vec{#1}} % arrow\)
\( \newcommand{\vectorAt}[1]{\vec{\text{#1}}} % arrow\)
\( \newcommand{\vectorB}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vectorC}[1]{\textbf{#1}} \)
\( \newcommand{\vectorD}[1]{\overrightarrow{#1}} \)
\( \newcommand{\vectorDt}[1]{\overrightarrow{\text{#1}}} \)
\( \newcommand{\vectE}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{\mathbf {#1}}}} \)
\( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}} } \)
\( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash {#1}}} \)
Relajación de campos eléctricos y carga en medios conductores
Los campos lectrico y magnético establecidos en medios homogéneos conductores invariantes en el tiempo tienden a decairse exponencialmente a menos que se mantengan. Bajo el supuesto cuasistático todas las variaciones de tiempo son lo suficientemente lentas como para que las contribuciones a\(\overline{\mathrm{E}}\) by\(\partial \overline{\mathrm{B}} / \partial \mathrm{t}\) sean insignificantes, lo que evita el comportamiento ondulatorio y simplifica el problema. Este proceso de relajación se rige por la relación conservación-carga (2.1.21), la ley de Gauss y la ley\((\nabla \bullet \overline{\mathrm{D}}=\rho)\) de Ohm\((\overline{\mathrm{J}}=\sigma \overline{\mathrm{E}})\):
\[ \nabla \bullet \overline{\mathrm{J}}+\partial \rho / \partial \mathrm{t}=0=\nabla \bullet(\sigma \overline{\mathrm{E}})+(\partial / \partial \mathrm{t})(\nabla \bullet \varepsilon \overline{\mathrm{E}})=\nabla \bullet[(\sigma+\varepsilon \partial / \partial \mathrm{t}) \overline{\mathrm{E}}]=0\]
Dado que una arbitraria\(\overline{\mathrm{E}}\) puede establecerse por condiciones iniciales, la solución general a (4.3.1) requiere\((\sigma+\varepsilon \partial / \partial \mathrm{t}) \nabla \bullet \overline{\mathrm{E}}=0\), conduciendo a la ecuación diferencial:
\[(\partial / \partial \mathrm{t}+\sigma / \varepsilon) \rho=0 \]
donde\( \nabla \bullet \overline{\mathrm{E}}=\rho / \varepsilon\). Esto tiene la solución que\( \rho(\overline{\mathrm{r}})\) relaja exponencialmente con una constante de tiempo de relajación de carga\(\tau\) = ε/σ segundos:
\[ \rho(\bar{r})=\rho_{0}(\bar{r}) e^{-\sigma t / \varepsilon}=\rho_{0}(\bar{r}) e^{-t / \pi}[-3] \qquad\qquad\qquad(\text { charge relaxation })\]
De ello se deduce que un campo eléctrico inicial arbitrario\( \overline{\mathrm{E}}(\overline{\mathrm{r}})\) en un medio con ε y σ uniformes también decaerá exponencialmente con la misma constante de tiempo ε/σ porque la ley de Gauss se relaciona\(\overline{\mathrm{E}}\) y ρ linealmente:
\[\nabla \bullet \overline{\mathrm{E}}=\rho(\mathrm{t}) / \varepsilon\]
donde\( \). Por lo tanto, la relajación del campo eléctrico se caracteriza por:
\[ \]
Debemos esperar tal decaimiento exponencial porque cualquier campo eléctrico en un conductor generará corrientes y por lo tanto disipará la potencia proporcional a J 2 y E 2. Pero la energía eléctrica almacenada también es proporcional a E 2, y la disipación de potencia es la derivada negativa de la energía almacenada. Es decir, la energía decae a una velocidad proporcional a su valor presente, lo que resulta en una decadencia exponencial. En cobre\(\tau\) = ε o /σ 9×10 -12/(5×10 7) 2×10 -19 segundos, corto comparado con cualquier retraso de interés común. El caso especial de las resistencias y condensadores de placa paralela se discute en la Sección 3.1.
¿Cuáles son las constantes de tiempo de relajación del campo eléctrico\(\tau\) para el agua de mar (ε 80ε o, σ 4) y suelo seco (ε 2ε o, σ 10 -5)? ¿Para qué frecuencias de radio pueden considerarse buenos conductores?
Solución
Ecuación (4.3.5) rendimientos\(\tau\) = ε/σ (80×8.8×10 -12) /4 1.8×10 -10 segundos para agua de mar, y (2×8.8×10 -12) /10 -5 1.8×10 -6 segundos para suelo seco. Siempre y cuando\(\overline{\mathrm{E}}\) cambie lentamente con respecto a\(\tau\), el medio tiene tiempo para cancelar\(\overline{\mathrm{E}}\); frecuencias por debajo de ~5 GHz y ~500 kHz tienen esta propiedad para el agua de mar y suelo seco típico, respectivamente, que se comportan como buenos conductores a estas frecuencias más bajas. El suelo húmedo se comporta como un conductor hasta ~5 MHz y superior.
Relajación de campos magnéticos en medios conductores
Los campos magnéticos y sus corrientes inducidas decaen de manera similar exponencialmente en los medios conductores a menos que se mantengan externamente; este proceso de decaimiento a menudo se denomina difusión magnética o relajación magnética. Suponemos que las variaciones de tiempo son lo suficientemente lentas como para que las contribuciones a\(\overline{\mathrm{H}}\) by\(\partial \overline{\mathrm{D}} / \partial t\) sean insignificantes. En este límite la ley de Ampere se convierte en:
\[\nabla \times \overline{\mathrm{H}}=\overline{\mathrm{J}}=\sigma \overline{\mathrm{E}}\]
\[\nabla \times(\nabla \times \overline{\mathrm{H}})=\sigma \nabla \times \overline{\mathrm{E}}=-\sigma \mu \partial \overline{\mathrm{H}} / \partial \mathrm{t}=-\nabla^{2} \overline{\mathrm{H}}+\nabla(\nabla \bullet \overline{\mathrm{H}})=-\nabla^{2} \overline{\mathrm{H}}\]
donde\((\nabla \bullet \overline{\mathrm{B}}=0)\) se utilizó la ley de Faraday, la identidad vectorial (2.2.6) y la ley de Gauss.
La ecuación diferencial resultante:
\[\sigma \mu \partial \overline{\mathrm{H}} / \partial \mathrm{t}=\nabla^{2} \overline{\mathrm{H}}\]
tiene al menos una solución simple:
\[\overline{\mathrm{H}}(\mathrm{z}, \mathrm{t})=\hat{x} \mathrm{H}_{\mathrm{o}} \mathrm{e}^{-\mathrm{t} / \tau_{\mathrm{m}}} \cos \mathrm{k} \mathrm{z}\]
donde asumimos una sinusoide variable z polarizada x. Sustituir (4.3.9) en (4.3.8) produce la constante de tiempo deseada:
\[\tau_{\mathrm{m}}=\mu \sigma / \mathrm{k}^{2}=\mu \sigma \lambda^{2} / 4 \pi^{2} \quad[\mathrm{s}] \qquad \qquad \qquad \text { (magnetic relaxation time) }\]
Así, la vida útil de las distribuciones de campo magnético en medios conductores aumenta con la permeabilidad (densidad de almacenamiento de energía), la conductividad (reduciendo la disipación para una corriente dada) y la longitud de onda al cuadrado (λ = 2\(\pi\) /k).
Corrientes inducidas
Los campos magnéticos cuasistáticos inducen campos eléctricos en virtud de la ley de Faraday:\(\nabla \times \overline{\mathrm{E}}=-\mu \partial \overline{\mathrm{H}} / \partial \mathrm{t}\). En los conductores estos campos eléctricos inducidos impulsan corrientes que obedecen la ley de Lenz: “La dirección de las corrientes inducidas tiende a oponerse a los cambios en el flujo magnético”. Las corrientes inducidas encuentran amplia aplicación, por ejemplo, en: 1) calentamiento, como en hornos de inducción que funden metales, 2) accionamiento mecánico, como en motores de inducción y generadores de impulso, y 3) blindaje electromagnético. En algunos casos estas corrientes inducidas son indeseables y se inhiben subdividiendo los conductores en elementos separados por finas barreras aislantes. Todos estos ejemplos se discuten a continuación.
Consideremos primero un simple cilindro hueco conductor de longitud W accionado circularmente por la corriente I o u (t), como se ilustra en la Figura 4.3.1, donde u (t) es la función de paso unitario (la corriente es cero hasta t = 0, cuando se convierte en I o). Centrado en el cilindro exterior se encuentra un segundo cilindro aislado de conductividad σ y que tiene una pared delgada de espesor δ; su longitud y diámetro son W y D << W, respectivamente.
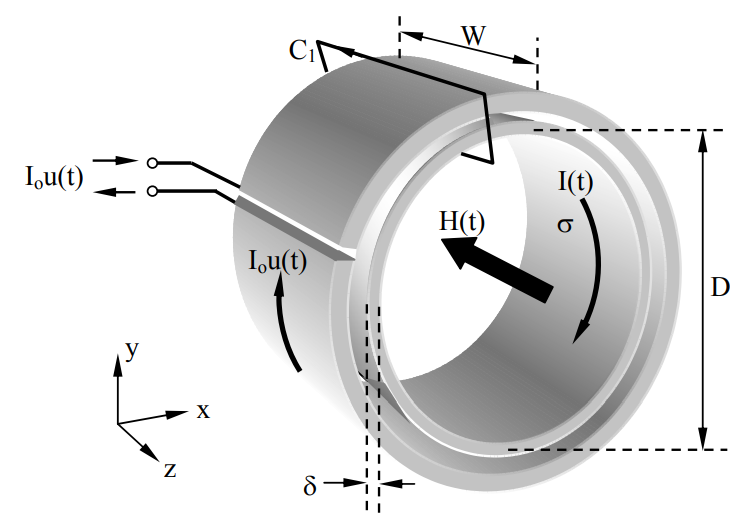
Si el cilindro interior fuera un conductor perfecto, entonces la corriente I o u (t) produciría una corriente de imagen igual y opuesta ~-I o u (t) en la superficie exterior del cilindro interno, produciendo así un campo magnético neto cero dentro del cilindro formado por esa corriente de imagen. Considere la integral de\(\overline{\mathrm{H}} \bullet \mathrm{d} \overline{\mathrm{s}}\) alrededor de un contorno cerrado C1 que enrosca tanto cilindros como círculos cero corriente neta a t = 0+; esta integral rinde cero. Si el conductor interno fuera ligeramente resistivo, entonces la misma corriente igual y opuesta fluiría sobre el cilindro interior, pero disiparía lentamente el calor hasta que la corriente de imagen decayera a cero y el campo magnético en su interior alcanzara el valor máximo I o/W [A m -1] asociado con el corriente externa I o. Estas conclusiones se cuantifican a continuación.
El campo magnético H dentro del cilindro interior depende de las corrientes que fluyen en los cilindros exterior e interior, I o e I (t), respectivamente:
\[\mathrm{H}(\mathrm{t})=\mathrm{u}(\mathrm{t})\left[\mathrm{I}_{\mathrm{o}}+\mathrm{I}(\mathrm{t})\right] / \mathrm{W}\]
La corriente I (t) que fluye en el cilindro interior es impulsada por el voltaje inducido por H (t) a través de la ley de Faraday (2.4.14):
\[\oint_{\mathrm{C}_{2}} \overline{\mathrm{E}} \bullet \mathrm{d} \overline{\mathrm{s}}=\mathrm{IR}=\mu_{\mathrm{o}} \int_{\mathrm{A}}(\mathrm{d} \overline{\mathrm{H}} / \mathrm{d} \mathrm{t}) \bullet \mathrm{d} \overline{\mathrm{a}}=\mu_{\mathrm{o}} \mathrm{A} \mathrm{d} \mathrm{H} / \mathrm{d} \mathrm{t}\]
donde el contorno C 2 está en el plano x-y y rodea el cilindro interior con diámetro D. El área circundada por el contorno A =\(\pi\) D 2 /4. La resistencia circunferencial del cilindro interior es R =\(\pi\) D/σδW ohmios. Por simplicidad asumimos que la permeabilidad aquí es μ o en todas partes. Sustituir (4.3.11) en (4.3.12) produce una ecuación diferencial para I (t):
\[\mathrm{I}(\mathrm{t})=-\left(\mu_{\mathrm{o}} \mathrm{A} / \mathrm{WR}\right) \mathrm{dI} / \mathrm{dt}\]
Sustituyendo la solución general I (t) = Ke -t/\(\tau\)en (4.3.13) rinde:
\[\mathrm{Ke}^{-t / \tau}=\left(\mu_{\mathrm{o}} \mathrm{A} / \mathrm{WR} \tau\right) \mathrm{Ke}^{-t / \tau}\]
\[\tau=\mu_{0} \mathrm{A} / \mathrm{W} \mathrm{R}=\mu_{0} \mathrm{A} \sigma \delta / \pi \mathrm{D} \quad [\mathrm{s}] \qquad \qquad \qquad \text{(magnetic relaxation time)}\]
Así, cuanto mayor es la conductividad del cilindro interno, y cuanto mayor sea su μA de producto, más tiempo tardan los campos magnéticos transitorios en penetrarlo. Para el caso especial donde δ = D/4\(\pi\) y A = D 2, encontramos\(\tau\) = μ o σ (D/2\(\pi\)) 2, que es la misma constante de tiempo de relajación magnética derivada en (4.3.10) si identificamos D con la longitud de onda λ de las variaciones del campo magnético. La ecuación (4.3.15) también es aproximadamente correcta si μ o → μ para el cilindro interior.
Dado que H (t) = 0 a t = 0+, (4.3.11) rinde I (t = 0+) = - I o, y la solución I (t) = Ke -t/\(\tau\) se convierte en:
\[\mathrm{I}(\mathrm{t})=-\mathrm{I}_{\mathrm{o}} \mathrm{e}^{-\mathrm{t} / \tau} \ [\mathrm{A}]\]
El campo magnético dentro del cilindro interior sigue de (4.3.16) y (4.3.11):
\[\mathrm{H}(\mathrm{t})=\mathrm{u}(\mathrm{t}) \mathrm{I}_{\mathrm{o}}\left(1-\mathrm{e}^{-t / \tau}\right) / \mathrm{W} \quad\left[\mathrm{A} \mathrm{m}^{-1}\right]\]
La geometría de la Figura 4.3.1 puede ser utilizada para calentar materiales resistivos tales como metales eléctricamente colocando los metales en un recipiente cerámico en el que los campos magnéticos sinusoidales penetren fácilmente. Las corrientes inducidas pueden fundir el material más rápido calentando el material en su totalidad en lugar de solo en la superficie, como lo haría una llama. La frecuencia f generalmente debe ser suficientemente baja para que los campos magnéticos penetren en una fracción significativa del diámetro del contenedor; f << 1/\(\tau\).
El cilindro interior de la Figura 4.3.1 también puede ser utilizado para proteger su interior de campos magnéticos alternos diseñándolo de manera que su constante de tiempo\(\tau\) sea mucho mayor que el periodo de la señal de CA no deseada; grandes valores de μσδ facilitan esto ya que\(\tau\) = μ o Aσδ/\(\pi\) D (4. 3.15). Dado que podemos modelar un cilindro interior sólido como un continuo de conchas conductoras delgadas concéntricas, se deduce que las carcasas internas comenzarán a ver campos magnéticos significativos solo después de que las conchas circundantes lo hagan, y por lo tanto el retraso de tiempo experimentado aumenta con la profundidad. Esto es consistente con\(\tau\) ∝ δ. La penetración de campos alternos en superficies conductoras se analiza más a fondo en la Sección 9.3 en términos de la profundidad exponencial de penetración cutánea\(\delta=\sqrt{2 / \omega \mu \sigma} \quad [\mathrm{m}]\).
En la Figura 4.3.1 se sugieren dos configuraciones de actuadores. Primero, el cilindro interior podría insertarse solo parcialmente en el cilindro exterior. Entonces la fuerza neta sobre el cilindro interior lo expulsaría cuando el cilindro exterior estuviera energizado porque la polaridad de estos dos electroimanes se invierten, el exterior alimentado por I o y el interno por - I o (1 - e -t/\(\tau\)). Las fuerzas electromagnéticas se discuten más a fondo en el Capítulo 5; aquí basta señalar que las corrientes inducidas pueden ser utilizadas para simplificar los actuadores electromecánicos. Se puede aplicar una “patada” similar a una placa plana colocada a través del extremo del cilindro exterior, ya que nuevamente la corriente de imagen especular de forma cilíndrica inducida experimentaría una fuerza repulsiva transitoria. Las corrientes de imagen especular se discutieron en la Sección 4.2.
Los núcleos internos de los transformadores y algunos inductores son típicamente de hierro y están rodeados por cables que transportan corrientes alternas, como se explica en la Sección 3.2. Las corrientes alternas inducen corrientes circulares en el núcleo llamadas corrientes parásitas que disipan la energía. Para minimizar tales corrientes y pérdidas inducidas, los núcleos conductores de alto μ comúnmente se componen de muchas láminas delgadas separadas entre sí por capas delgadas de barniz u otro aislante que bloquea en gran medida esas corrientes inducidas; estos se denominan núcleos laminados. Se puede obtener una estimación aproximada de la efectividad del uso de N placas en lugar de una señalando que la potencia Pd disipada en cada laminación es proporcional a V 2 /R, donde\(\mathrm{V}=\oint_{\mathrm{C}} \overline{\mathrm{E}} \bullet \mathrm{d} \overline{\mathrm{s}}\) está la tensión de bucle inducida por H (t) y R es la resistencia efectiva de ese bucle. Por diseño H (t) generalmente penetra en el núcleo completo del transformador. Así, V es aproximadamente proporcional al área de cada laminación en el plano perpendicular a\(\overline{\mathrm{H}}\), lo que disminuye como 1/N. la resistencia R experimentada por la corriente inducida que circula en cada laminación aumenta aproximadamente en N ya que el ancho del canal a través del cual puede fluir se reduce como N aumenta mientras que la longitud del canal cambia solo moderadamente. La potencia total disipada para N laminaciones es así aproximadamente proporcional a NV 2 /R ∝ NN -2 /N = N -2. Por lo tanto, solo necesitamos aumentar N hasta el punto en que la pérdida de potencia sea tolerable y la penetración del núcleo del transformador por H (t) sea casi completa en cada período.
¿Cuánto tiempo tarda un campo magnético en penetrar un cilindro metálico de 1 mm de espesor de diámetro D con conductividad 5×10 7 [S/m] si μ = μ o? Diseñe un escudo para una computadora de ~10 cm que bloquee los campos magnéticos de 1 MHz que emanan de una radio AM.
Solución
Si asumimos la geometría de la Figura 4.3.1 y usamos (4.3.15),\(\tau\) = μ o Aσδ/\(\pi\) D, encontramos\(\tau\) = 1.3×10 -6 ×D×5×10 7 ×10 -3 /4 = 0.016D segundos, donde A =\(\pi\) D 2 /4 y δ = 10 -3. Si D = 0.1, entonces\(\tau\) = 1.6×10 -2 segundos, que es ~105 más largo que el tiempo de subida ~10 -6 /2\(\pi\) de una señal de 1 MHz. Si una proporción menor de 10 2 es suficiente, entonces una capa de metal de un micrón de espesor evaporada sobre plástico delgado podría ser suficiente. Si el metal tuviera μ = 10 4 μ o, entonces una capa gruesa de onemicrón proporcionaría un factor de seguridad de 10 6.