
6.2: Actuadores y motores electrostáticos
- Page ID
- 125832

Introducción a los Sistemas Micro-Electromecánicos (MEMS)
El Capítulo 6 desarrolla el Capítulo 5 explorando una variedad de motores, generadores y sensores en configuraciones lineales y rotativas. Los ejemplos eléctricos se analizan en la Sección 6.2 y los ejemplos magnéticos en la Sección 6.3. La Sección 6.2.1 revisa los antecedentes, mientras que las Secciones 6.2.2 y 6.2.3 exploran dispositivos de placa de condensador paralelo utilizando movimiento lineal y rotativo respectivamente. La Sección 6.2.4 analiza los motores electrostáticos que ejercen fuerzas sobre los dieléctricos, mientras que la Sección 6.2.5 analiza los límites a la densidad de potencia planteados por la ruptura eléctrica del aire u otros medios, lo que limita la intensidad máxima del campo eléctrico.
Los sistemas microelectromecánicos (MEMS) se utilizan comúnmente como motores, generadores, actuadores y sensores y subyacen a una de las principales revoluciones actuales en la ingeniería eléctrica, a saber, la extensión de la tecnología de fabricación de circuitos integrados a sistemas electromecánicos en el mismo sustrato como los circuitos con los que interoperan. Dichos dispositivos ahora funcionan como interruptores ópticos, interruptores de radiofrecuencia, micrófonos, acelerómetros, termómetros, sensores de presión, sensores químicos, sistemas microfluídicos, motores electrostáticos y magnéticos, sensores biológicos y otros dispositivos. Se utilizan en sistemas tan diversos como proyectores de video, disparadores de bolsas de aire de automóviles y memorias digitales mecánicas para entornos cálidos.
Las ventajas de MEMS sobre sus contrapartes más grandes incluyen el tamaño, el peso, el consumo de energía y el costo, y también una velocidad mucho mayor debido a las masas y distancias extremadamente pequeñas involucradas. Por ejemplo, algunos interruptores electromecánicos MEMS pueden operar a frecuencias de MHz, en comparación con las velocidades típicas por debajo de ~1 kHz para la mayoría de los dispositivos mecánicos tradicionales. El tamaño de característica de MEMS varía desde sub-micras o micras hasta uno o más milímetros, aunque los principios electromagnéticos básicos se aplican a dispositivos de cualquier escala. Los recientes avances en las técnicas de microfabricación, como las nuevas técnicas de litografía y grabado, los micromoldes de precisión y las herramientas mejoradas de corte y astillado por láser, han simplificado el desarrollo de MEMS y ampliado sus capacidades.
La ley de fuerza de Lorentz (6.2.1) es fundamental para todos los motores y generadores eléctricos y magnéticos y expresa el vector de fuerza\(\overline{\mathrm{f}}\) [Newtons] que actúa sobre una carga q [Coulombs] en función del campo eléctrico local\(\overline{\mathrm{E}} \)\(\overline{\mathrm{H}}\), campo magnético y vector de velocidad de carga \(\overline{\mathrm{v}}\)[ms -1]:
\[\overline{\mathrm{f}}=\mathrm{q}\left(\overline{\mathrm{E}}+\overline{\mathrm{v}} \times \mu_{\mathrm{o}} \overline{\mathrm{H}}\right)[\text { Newtons }]\]
Para los ejemplos de la Sección 6.2 las velocidades\(\overline{\mathrm{v}} \) y los campos magnéticos\( \overline{\mathrm{H}}\) son insignificantes, por lo que la fuerza es principalmente electrostática\( \overline{\mathrm{f}}=\mathrm{q} \overline{\mathrm{E}}\), y se puede encontrar fácilmente si\(\overline{\mathrm{E}} \) se conoce. Cuando\( \overline{\mathrm{E}}\) se desconoce, el método energético de la Sección 5.4.2 a menudo se puede utilizar en su lugar, como se ilustra más adelante. Las densidades de potencia alcanzables en los dispositivos MEMS pueden ser bastante altas y, por lo general, están limitadas por fallas de materiales, como avería eléctrica o sobrecalentamiento óhmico.
Actuadores electrostáticos
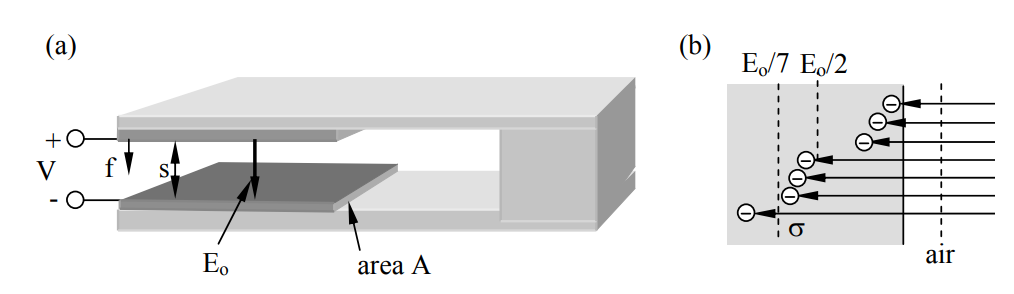
Los actuadores MEMS más simples utilizan la fuerza eléctrica entre dos placas de condensador para unirlas, como se ilustra en la Figura 6.2.1 (a) para un altavoz o interruptor en voladizo. La densidad de fuerza Lorentz F [N m -2] que atrae a las dos placas viene dada por el\(\mathrm{q} \overline{\mathrm{E}}\) término en (6.2.1). Aunque se podría suponer que la densidad de fuerza en la placa superior es simplemente ρ s E, donde ρ s es la densidad de carga superficial [C m -2] en esa placa, la fuerza correcta es la mitad de este valor porque esas cargas más cercanas a la superficie tamizan las que están detrás, como se sugiere en la Figura 6.2.1 (b); las cargas más alejadas de la superficie casi no perciben\(\overline{\mathrm{E}} \) en absoluto. La figura muestra una correspondencia uno a uno entre las líneas de campo eléctrico y las cargas en una distribución altamente idealizada, la realidad es más aleatoria. La figura muestra que la intensidad de campo promedio E percibida por las cargas es la mitad del campo superficial E o, independientemente de su distribución de profundidad ρ (z). Por lo tanto, la presión eléctrica total atractiva es:
\[P_{e}=\rho_{s}\left(E_{o} / 2\right) \ \left[N m^{-2}\right]\]
Pero la condición límite en un conductor (2.6.15) es\(\hat{n} \bullet \overline{\mathrm{D}}=\rho_{\mathrm{s}}\), entonces:
\[\rho_{\mathrm{s}}=\varepsilon_{\mathrm{o}} \mathrm{E}_{\mathrm{o}}\]
\[P_{e}=\varepsilon_{0} E_{o}^{2} / 2 \ \left[\mathrm{Nm}^{-2}\right] \quad \quad ( {electric \ pressure \ } \text{attracting capacitor plate})\]
Esta es la misma presión derivada más rigurosamente en (5.2.4) y (5.4.3).
Si E o está cerca de su valor de ruptura\(\mathrm{E}_{\mathrm{B}} \cong 10^{8}\left[\mathrm{V} \mathrm{m}^{-1}\right]\) para brechas menores a ~10 -6 metros, entonces la presión\(\mathrm{P}=\varepsilon_{0} \mathrm{E}_{\mathrm{o}}^{2} / 2 \cong 8.8 \times 10^{-12} \times 10^{16} / 2=4.4 \times 10^{4} \ \left[\mathrm{N} \mathrm{m}^{-2}\right]\). Un Newton es aproximadamente la fuerza gravitacional sobre la manzana que cayó sobre la cabeza de Newton (lo que provocó su teoría de la gravedad), o sobre un cuarto de libra de mantequilla. Por lo tanto, esta densidad máxima de fuerza electrostática es de aproximadamente una libra por centímetro cuadrado, comparable a la de un imán fuerte.
El voladizo actúa como un resorte con una constante de resorte k, por lo que la fuerza total f se relaciona simplemente con la deflexión x: f = kx = PA, donde A es el área de la placa del condensador. Por lo tanto, la deflexión es:
\[\mathrm{x}=\mathrm{PA} / \mathrm{k}=\varepsilon_{0} \mathrm{E}_{\mathrm{o}}^{2} \mathrm{A} / 2 \mathrm{k} \ [\mathrm{m}]\]
La relación A/k está controlada por la composición, espesor y longitud del voladizo, y la deflexión deseada es controlada por la aplicación. Por ejemplo, k debe ser adecuado para superar la sticción 19 en los interruptores que hacen y rompen el contacto, y x debe ser adecuado para asegurar que el voltaje entre las placas del condensador no cause arcos cuando el interruptor está abierto.
Alternativamente, ambas placas de condensador podrían cargarse positiva o negativa para que se repelan entre sí. En este caso la carga Q se mueve hacia las superficies exteriores y se conecta a las mismas intensidades de campo que antes debido a condiciones de contorno (E = Q/ε o A), excepto que la presión negativa ε o E 2 /2 en las dos placas actúa para separarlas en lugar de juntas. El campo entre las placas es entonces cero.
19 La adherencia es la fuerza que se debe superar al separar dos superficies de contacto. Estas fuerzas a menudo se vuelven importantes para objetos de tamaño micrométrico, particularmente para buenos conductores en contacto durante largos períodos.
Incluso con intensidades de campo eléctrico extremas, la densidad de potencia [W m -3] disponible con actuadores MEMS de movimiento lineal puede ser insuficiente. La potencia es igual a la fuerza por velocidad, y las velocidades de rotación pueden ser mucho mayores que las velocidades lineales en sistemas con carrera limitada, como el voladizo de la Figura 6.2.1 (a) o los sistemas de desplazamiento lateral ilustrados en la Figura 6.2.2. Dado que es difícil calcular los campos eléctricos laterales responsables de las fuerzas laterales en sistemas rotativos o lineales [por ejemplo, los componentes z en la Figura 6.2.2 (a)], generalmente se utilizan en su lugar los métodos de energía descritos a continuación.
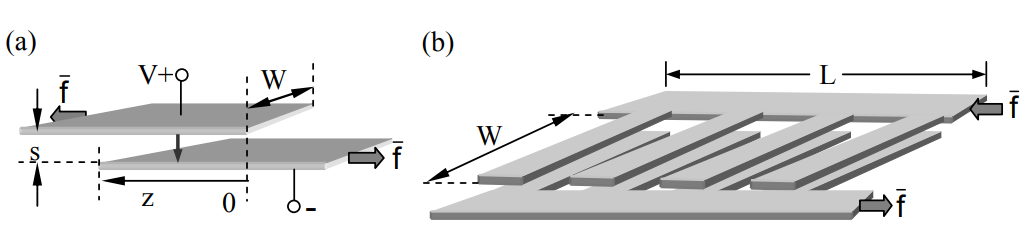
Las dos placas paralelas cargadas ilustradas en la Figura 6.2.2 (a) son arrastradas lateralmente una hacia la otra (z aumenta) porque las cargas opuestas se atraen. La fuerza\(\overline{\mathrm{f}} \) requerida para separar las placas depende únicamente de su carga eléctrica q y de la geometría de la placa, independientemente de cualquier circuito conectado. Esta fuerza\(\overline{\mathrm{f}}\) en la dirección -z se puede encontrar señalando que f sí funciona en el sistema de capacitor/circuito, aumentando su energía total w T si f es positiva:
\[\mathrm{f}=-\mathrm{d} \mathrm{w}_{\mathrm{T}} / \mathrm{d} \mathrm{z}=-\mathrm{d} \mathrm{w}_{\mathrm{e}} / \mathrm{d} \mathrm{z}-\mathrm{V} \mathrm{d} \mathrm{q} / \mathrm{d} \mathrm{z} \ [\mathrm{N}] \qquad \qquad \qquad \text { (energy-force equation) }\]
donde w e es la energía eléctrica almacenada en el condensador, V es la tensión del condensador 20, y dq es la carga incremental que fluye desde cualquier circuito conectado al terminal positivo del condensador. El signo negativo en (6.2.6) resulta porque f está en la dirección -z. Dado que esta ecuación de energía-fuerza es correcta independientemente de cualquier circuito conectado, podemos evaluarla para un circuito abierto conectado, batería o equivalente Thevenin arbitrario, siempre que resulte en el voltaje V del condensador dado y la carga q.
La fuerza calculada usando (6.2.6) es la misma para cualquier circuito conectado y cualquier forma de la expresión de energía (3.1.16):
\[\mathrm{w}_{\mathrm{e}}=\mathrm{CV}^{2} / 2=\mathrm{q}^{2} / 2 \mathrm{C} \ [\mathrm{J}] \qquad\qquad\qquad \text { (electric energy in a capacitor) }\]
El álgebra se minimiza, sin embargo, si asumimos que el condensador es de circuito abierto de manera que q es constante y dq/dz = 0 in (6.2.6). Debido a que V depende de z en este caso, es más sencillo usar w e = q 2 /2C para evaluar (6.2.6), donde: 1) C = ε o Wz/s [F], 2) el área de superposición del condensador es Wz, 3) la separación de placas es s << W, y 4) descuidamos los campos de franqueo. Así (6.2.6) se convierte en:
\[\mathrm{f}=-\left(\mathrm{q}^{2} / 2\right)\left(\mathrm{dC}^{-1} / \mathrm{dz}\right)=-\left(\mathrm{q}^{2} / 2\right)\left(\mathrm{s} / \varepsilon_{0} \mathrm{W}\right) \mathrm{d} \mathrm{z}^{-1} / \mathrm{dz}=\left(\mathrm{q}^{2} / 2\right)\left(\mathrm{s} / \varepsilon_{0} \mathrm{Wz}^{2}\right) \ [\mathrm{N}]\]
20 Por conveniencia, V representa voltaje y v representa velocidad en esta sección.
El rápido aumento de la fuerza como z → 0 resulta porque q es constante y se concentra en los extremos de las placas a medida que el solapamiento se acerca a cero; z→0 también viola la suposición de que los campos marginales pueden descuidarse.
Es interesante relacionar la fuerza f de (6.2.8) con la intensidad del campo eléctrico E, donde:
\[\mathrm{E}=\rho_{\mathrm{s}} / \varepsilon_{\mathrm{o}}=\mathrm{q} / \mathrm{Wz} \varepsilon_{\mathrm{o}} \ \left[\mathrm{V} \mathrm{m}^{-1}\right]\]
\[\mathrm{q}=\mathrm{Wz} \varepsilon_{0} \mathrm{E}=\mathrm{Wz} \varepsilon_{\mathrm{o}} \mathrm{V} / \mathrm{s} \ [\mathrm{C}]\]
\[\mathrm{f}=\mathrm{q}^{2} \mathrm{s} / 2 \varepsilon_{\mathrm{o}} \mathrm{Wz}^{2}=\mathrm{Ws} \varepsilon_{\mathrm{o}} \mathrm{E}^{2} / 2=\mathrm{A}^{\prime} \mathrm{P}_{\mathrm{e}} \ [\mathrm{N}] \qquad\qquad\qquad \text { (lateral electric force) }\]
donde A' = Ws es el área de la sección transversal del espacio perpendicular a\( \overline{\mathrm{f}}\), y\(\mathrm{P}_{\mathrm{e}}=\Delta \mathrm{W}_{\mathrm{e}}=\varepsilon_{\mathrm{o}} \mathrm{E}^{2} / 2 - 0\) es la diferencia de presión eléctrica que actúa al final del condensador. Tenga en cuenta que esta presión es perpendicular\(\overline{\mathrm{E}}\) y está “empujando” hacia la región libre de campo adyacente donde W e = 0; en contraste, la presión paralela a\(\overline{\mathrm{E}}\) siempre “tira”. Posteriormente encontraremos que la “presión magnética” P m = ΔW m es igualmente atractiva paralela\(\overline{\mathrm{H}}\) y empuja en direcciones ortogonales a\(\overline{\mathrm{H}}\).
Tenga en cuenta que si V es constante, entonces la fuerza f (6.2.11) no depende de z y se maximiza como s→0. Para una V fija, la separación mínima práctica de placas s corresponde a E cerca del umbral de avería eléctrica, lo que se discute más a fondo en la Sección 6.2.5. Obsérvese también que la fuerza f es proporcional a W, la cual se puede maximizar utilizando múltiples dedos similares a los ilustrados en la Figura 6.2.2 (b). Los diseños de actuador y motor generalmente maximizan f y W mientras conservan la carrera deseada 21.
21 La “carrera” de un actuador es su rango de posiciones; en la Figura 6.2.2 (a) sería el máximo menos el valor mínimo de z. Aunque la fuerza (6.2.11) se vuelve infinita como el mínimo z → 0 para la constante q, esto violaría la suposición z >> d y puede causar V→∞; V generalmente se mantiene constante, sin embargo.
Diseñar un pequeño actuador lineal de placa superpuesta electrostática que abra un pestillo moviendo 1 mm con una fuerza de 10 -2 Newtons.
Solución
El actuador de dos placas ilustrado en la Figura 6.2.2 (a) ejerce una fuerza f = Wsε o E 2 (6.2.11). Si E está cerca del valor máximo de gas seco de ~3.2×10 6 V m -1, el hueco s = 1 mm, y W = 1 cm, entonces f = 10 -2 × 10 -3 × 8.85 × 10 -12 × 10 13 = 8.85×10 -4 [N]. Mediante el uso de dedos M, cada uno más ancho que el trazo de 1 mm, la fuerza se puede aumentar en M [ver Figura 6.2.2 (b)]. Si dejamos que M = 12 el dispositivo rinde f = 1.06×10 -2, pero su longitud L debe ser mayor a 12 veces el doble del ancho del dedo (ver figura), donde el ancho de dedo G debe superar no solo el trazo sino también varias veces s, para que los campos de flecos sean insignificantes. Si G 4 mm, entonces la longitud del actuador es 12×2×4 mm = 9.6 cm, grande en comparación con el ancho. Un actuador de tres placas con dos placas puestas a tierra en el exterior y una placa cargada en el interior duplicaría la fuerza, reduciría a la mitad la longitud L, protegería a los usuarios de la electrocución y simplificaría el sellado del actuador contra la humedad que podría cortocircuitar las placas. El voltaje de la placa V = Es = 3200 voltios. Este diseño no es único, claro.
Motores electrostáticos rotativos
Debido a que las fuerzas (6.2.4) o (6.2.11) en los motores electrostáticos están limitadas por la intensidad máxima del campo eléctrico E posible sin arco eléctrico, las densidades de potencia más altas [W m -3] requieren mayores velocidades ya que la potencia P = fv [vatios], donde f es fuerza [N], y v es velocidad [m s -1]. La Figura 6.2.3 muestra un motor electrostático rotativo de 4 segmentos ideal para el cual v y las fuerzas centrífugas resultantes están finalmente limitadas por la resistencia a la tracción del rotor. Por razones tanto materiales como aerodinámicas, la v máxima en la punta del rotor suele ser algo menor que la velocidad del sonido, ~340 m/s Algunos rotores giran mucho más rápido en vacío si el material puede soportar la fuerza centrífuga.
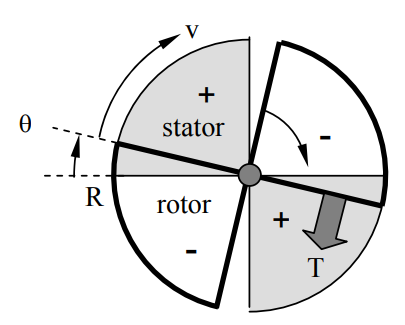
Este motor tiene radio R, separación de placas s y voltaje de funcionamiento V. Las placas estacionarias de “estator” ocupan dos cuadrantes del motor y un segundo par de placas cuadrantes (el “rotor”) pueden rotar para producir un área de superposición A = R 2 θ [m 2] que varía de cero a \(\pi\)R 2 /2 a medida que θ aumenta de cero a\(\pi\) /2. Si el voltaje V se aplica a través de las placas, se produce un par T 22, donde:
\[\mathrm{T}=-\mathrm{d} \mathrm{w}_{\mathrm{T}} / \mathrm{d} \theta \ [\mathrm{N} \mathrm{m}]\]
y DWt es el incremento por el cual la energía total del sistema (campos más batería) se incrementa como resultado del movimiento dθ. El signo negativo de entrada (6.2.12) refleja el hecho de que el par T es aplicado por el motor al ambiente. Si reemplazamos el área de superposición de Wz en (6.2.8) por su equivalente R 2 θ, entonces (6.2.8) y (6.2.12) se convierten en:
\[\mathrm{w}_{\mathrm{e}}=\mathrm{Q}^{2} / 2 \mathrm{C}=\mathrm{Q}^{2} \mathrm{s} / 2 \varepsilon_{\mathrm{o}} \mathrm{R}^{2} \theta\]
\[\mathrm{T}=-\mathrm{d} \mathrm{w}_{\mathrm{T}} / \mathrm{d} \theta=\mathrm{Q}^{2} \mathrm{s} / 2 \varepsilon_{\mathrm{o}} \mathrm{R}^{2} \theta^{2}=\varepsilon_{\mathrm{o}} \mathrm{R}^{2} \mathrm{V}^{2} / \mathrm{s} \ [\mathrm{N} \mathrm{m}]\]
donde Q = ε o R 2 θV/s [C], que se desprende de (6.2.10) donde W z → R 2 θ [m 2].
22 Torque T [Nm] es igual a la fuerza f sobre una palanca multiplicada por su longitud L. Por lo tanto, el trabajo mecánico realizado por el par es w m = fx = fL (x/L) = Tθ, donde θ = x/L es el ángulo (radianes) a través del cual la palanca gira alrededor de su pivote en un extremo. La potencia es Tdθ/dt = Tω [W].
Si asumimos R = 10 -3, s = 10 -6, y V = 3 voltios (correspondiente a 3×10 6 Vm -1, por debajo del límite de ruptura discutido en la Sección 6.2.5; entonces (6.2.14) rinde:
\[\mathrm{T}=8.8 \times 10^{-12} \times\left(10^{-3}\right)^{2} 3^{2} / 10^{-6} \cong 7.9 \times 10^{-11 } \ [\mathrm{N} \mathrm{m}]\]
Este par existe solo hasta que las placas se superponen por completo, momento en el que el voltaje V se conmuta a cero hasta que las placas cosieron otro 90° y se restablece V. El ciclo de trabajo de este motor es así 0.5 porque T ≠ 0 solo la mitad del tiempo.
Un solo motor ideal puede entonces entregar un promedio de Tω/2 vatios, donde el factor ½ refleja el ciclo de trabajo, y Tω es la potencia mecánica asociada con el par T en un eje que gira a ω radianes s -1. Si la velocidad de punta v de este rotor es de 300 ms -1, ligeramente menor que la velocidad del sonido para reducir las pérdidas de arrastre al tiempo que maximiza ω, entonces la velocidad angular correspondiente ω es V/r = 300/10 -3 = 3×10 5 radianes s -1 o ~3×10 6 rpm, y la potencia disponible Tω/2 7.9×10 -11 × 3×10 5 /2 1.2×10 -5 watts si descuidamos todas las pérdidas. En principio, uno podría empaquetar ~25,000 motores en un centímetro cúbico si cada motor tuviera un grosor de 10 micrones, produciendo ~0.3 W/cm 3. Al usar un motor con N segmentos en lugar de 4, esta densidad de potencia y par podría aumentarse en un factor de N/4. El pequeño espacio micrométrico permitiría valores de N tan altos como ~500 antes de que los campos marginales se vuelvan importantes, y densidades de potencia de ~40 W/cm -3.
Esta densidad de potencia de 40 W/cm 3 se puede comparar con la de un motor de automóvil de 200 hp que entrega 200 × 746 vatios 23 y ocupa 0.1 m 3, rindiendo solo ~1.5 W/cm 3. Las densidades de potencia extremadamente altas son prácticas solo en pequeños dispositivos MEMS porque el calor y el par son más fáciles de eliminar, y porque solo las brechas a escala micrométrica permiten las mayores intensidades de campo, como se explica en la Sección 6.2.5. Los motores MEMS rotativos tienen un gran potencial para aplicaciones de potencia extremadamente baja donde la extracción de par puede ser eficiente; ejemplos incluyen controladores para micro-turbinas de gas y bombas. El campo de los motores MEMS es aún joven, por lo que se desconoce todo su potencial.
23 Hay 746 vatios por caballo de fuerza.
Actuadores y motores dieléctricos
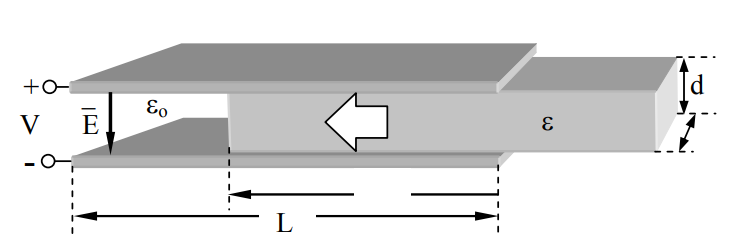
Una dificultad con el motor rotativo de la Figura 6.2.3 es que se debe aplicar voltaje a las paletas móviles a través de un límite mecánico deslizante. Una alternativa es utilizar un rotor dieléctrico accionado por voltajes aplicados solo al estator. La configuración podría ser similar a la de la Figura 6.2.3 pero el rotor sería dieléctrico y estaría montado entre estatores conductores idénticos con un potencial V entre ellos que se enciende y apaga a veces para producir un par promedio a medida que gira el rotor. La Figura 6.2.4 ilustra el concepto en términos de un actuador lineal para el que se puede encontrar más fácilmente la fuerza f. De nuevo asumimos que los campos de franjas pueden ser descuidadas porque W >> d.
La fuerza f se puede encontrar diferenciando la energía eléctrica almacenada total w e con respecto al movimiento z, donde C es la capacitancia efectiva de esta estructura, y:
\[\mathrm{w}_{\mathrm{e}}=\mathrm{CV}^{2} / 2=\mathrm{Q}^{2} / 2 \mathrm{C} \ [\mathrm{J}]\]
Para simplificar la diferenciación w e con respecto a z, es más fácil usar la expresión w e = Q 2 /2C porque es este caso Q es independiente de z mientras que C no lo es.
Para dos condensadores en paralelo C = C o + C ε (3.1.14), donde C o y C ε son las capacitancias asociadas con las mitades de aire y dieléctricas del actuador, respectivamente. La capacitancia C se definió en (3.1.8), y es igual a εA/s donde A es el área de la placa y s es la separación de placas. De ello se deduce que:
\[\mathrm{C}=\mathrm{C}_{\varepsilon}+\mathrm{C}_{\mathrm{o}}=\varepsilon \mathrm{zW} / \mathrm{s}+\varepsilon_{\mathrm{o}}(\mathrm{L}-\mathrm{z}) \mathrm{W} / \mathrm{s}=\left[\mathrm{z}\left(\varepsilon-\varepsilon_{\mathrm{o}}\right)+\varepsilon_{\mathrm{o}} \mathrm{L}\right] \mathrm{W} / \mathrm{s}\]
La fuerza f que tira de la losa dieléctrica entre las placas cargadas viene dada por la relación fuerza-energía (6.2.6) y se puede combinar con (6.2.16) y (6.2.17) para producir:
\[\begin{align} \mathrm{f} & \cong-\mathrm{d} \mathrm{w}_{\mathrm{e}} / \mathrm{d} \mathrm{z}=-\mathrm{d}\left(\mathrm{Q}^{2} / 2 \mathrm{C}\right) / \mathrm{d} \mathrm{z}=-\left(\mathrm{Q}^{2} \mathrm{s} / 2 \mathrm{W}\right) \mathrm{d}\left[\mathrm{z}\left(\varepsilon-\varepsilon_{\mathrm{o}}\right)+\varepsilon_{\mathrm{o}} \mathrm{L}\right]^{-1} / \mathrm{d} \mathrm{z} \\ &=\left(\mathrm{Q}^{2} \mathrm{s} / 2 \mathrm{W}\right)\left[\mathrm{z}\left(\varepsilon-\varepsilon_{\mathrm{o}}\right)+\varepsilon_{\mathrm{o}} \mathrm{L}\right]^{-2}\left(\varepsilon-\varepsilon_{\mathrm{o}}\right)=\left(\mathrm{Q}^{2} \mathrm{W} / 2 \mathrm{s} \mathrm{C}^{2}\right)\left(\varepsilon-\varepsilon_{\mathrm{o}}\right) \ [\mathrm{N}] \nonumber \end{align}\]
Esta fuerza se puede expresar en términos de la intensidad del campo eléctrico E entre las dos placas sustituyendo en (6.2.18) las expresiones Q = CV y V = Es:
\[\mathrm{f} \cong\left(\mathrm{E}^{2} \mathrm{s} \mathrm{W} / 2\right)\left(\varepsilon-\varepsilon_{\mathrm{o}}\right)=\left[\left(\varepsilon-\varepsilon_{\mathrm{o}}\right) \mathrm{E}^{2} / 2\right] \mathrm{W} \mathrm{s}=\Delta \mathrm{P}_{\mathrm{e}} \mathrm{A} \ [\mathrm{N}]\]
donde A = Ws es el área de la cara terminal de la losa dieléctrica, y la presión eléctrica diferencial que tira de la losa entre las placas cargadas es:
\[\Delta \mathrm{P}_{\mathrm{e}}=\left(\varepsilon-\varepsilon_{\mathrm{o}}\right) \mathrm{E}^{2} / 2 \ \left[\mathrm{Nm}^{-2}\right]\]
La presión diferencial ΔP e que empuja la interfaz hacia el condensador es así la diferencia entre la presión eléctrica en un lado de la interfaz dieléctrica y la del otro, donde la presión P e en cada lado es simplemente la densidad de energía eléctrica allí:
\[\mathrm{P}_{\mathrm{e}}=\varepsilon \mathrm{E}^{2} / 2 \ \left[\mathrm{Nm}^{-2}\right],\left[\mathrm{Jm}^{-3}\right]\]
Debido a que el campo eléctrico en el extremo derecho de la losa se acerca a cero, no ejerce ninguna fuerza adicional. La presión eléctrica se discute más a fondo en la Sección 5.5.2.
Aplicar estas ideas al motor rotativo de la Figura 6.2.3 implica simplemente reemplazar el rotor por su equivalente dieléctrico y situarlo entre placas conductoras del estator que son excitadas por V voltios para tirar de cada cuadrante dieléctrico hacia el espacio entre ellas. Entonces V se cambia a cero a medida que el dieléctrico sale de ese espacio para que el rotor pueda caer sin alimentación hasta que los cuadrantes dieléctricos comiencen a ingresar al siguiente par de placas del estator. Así, el voltaje de accionamiento V es distinto de cero la mitad del tiempo, con dos pulsos de voltaje por revolución de este rotor de dos cuadrantes. El tiempo de los voltajes debe responder a la posición exacta del rotor, que a menudo está determinada por un sensor de posición angular del rotor separado. El arranque puede fallar si el rotor está exactamente en la posición incorrecta donde f = 0 independientemente de V, y el rotor girará hacia atrás si comienza desde la posición incorrecta. La Figura 6.3.6 sugiere cómo múltiples segmentos y fases de excitación pueden evitar este problema en el contexto de los motores magnéticos.
Diseñe un motor electrostático rotativo de máxima densidad de potencia que entregue 10 W de potencia a ω 10 6 r s -1 sin hacer/romper ni contactos eléctricos deslizantes.
Solución
Un rotor dieléctrico segmentado intercalado entre placas conductoras cargadas evita el deslizamiento de los contactos eléctricos. Supongamos que el rotor tiene radio R, espesor s, y está hecho de dos dieléctricos eléctricamente aislados que tienen permitividades ε = 10ε o y ε o, y que están segmentados radialmente como lo es el rotor en la Figura 6.2.3, pero con M segmentos en lugar de 4. La presión máxima en los bordes de los límites dieléctricos del rotor entre ε y ε o es ΔP e = (ε - ε o) E 2 /2 [N m -2]. La potencia mecánica entregada durante el medio ciclo los voltajes que se aplican a la placa es Tω = 20 = ΔP e (R/2) SmΩ. Vamos a establecer arbitrariamente s = 10 -6, E = 10 6 [V m -1], y M = 800. Por lo tanto R = 2×20/ (SMΩδP e) = 40/ [10 -6 ×800×10 6 ×9×8.85×10 -12 × (10 6) 2 /2] = 1.3×10 -3 [m]. El voltaje de funcionamiento es Es 1 volt y la densidad de potencia es ~10 5 W/cm 3.
Desglose eléctrico
En todos los casos el par o fuerza producida por un actuador o motor electrostático MEMS está limitado por el campo de ruptura E B = V B /d, donde V B es el voltaje de ruptura, y la dependencia de E B en d es no lineal. La avería eléctrica de un gas ocurre cuando los electrones libres dispersos acelerados por E adquieren suficiente velocidad y energía (unos pocos electrones voltios 24) para eliminar electrones libres adicionales de las moléculas de gas cuando chocan, desencadenando así una reacción en cadena que conduce a la formación de arcos y corrientes potencialmente destructivas . Las moléculas de agua derraman electrones mucho más fácilmente en colisiones que las moléculas de nitrógeno u oxígeno, por lo que E B es mucho menor en el aire húmedo. Es por ello que es más fácil dibujar chispas visibles en el aire frío y seco de invierno que en verano, ya que en invierno las intensidades de campo pueden ser mucho mayores antes de que ocurra la avería, y tales averías de alto voltaje son más visibles.
24 Un electrón voltio es la energía adquirida por un electrón u otra partícula igualmente cargada a medida que se acelera a través de una diferencia de potencial de un voltio. Es equivalente a e = 1.6021×10 -19 Julios.
Sin embargo, si el hueco entre los dos electrodos es suficientemente pequeño, disminuye la probabilidad de que ocurra una colisión ionizante entre cualquier electrón libre y un átomo de gas antes de que el electrón golpee el electrodo cargado positivamente. Este camino libre medio, o distancia promedio antes de una “colisión”, para los electrones libres es del orden de una micra en el aire, por lo que se inhibe la ruptura para huecos menores que el camino libre medio. Sin embargo, incluso cuando la brecha es tan estrecha que es poco probable la ruptura del gas, si la intensidad de campo E se incrementa a ~3 × 10 8 [V m -1], o dos órdenes de magnitud más allá de los valores típicos para E B en gas seco, cualquier electrón libre puede entonces adquirir suficiente energía para soltar un ion de la pared cargada positivamente. Tal ion positivo puede entonces adquirir suficiente energía para liberar múltiples electrones cuando impacta la pared cargada negativamente, produciendo otra forma de reacción en cadena, arco eléctrico y ruptura.
Las razones por las que los actuadores eléctricos y los motores son tan atractivos en la escala de MEMS, pero casi nunca se usan a escalas más grandes, son por lo tanto que: 1) la intensidad del campo de ruptura E B aumenta aproximadamente dos órdenes de magnitud para brechas de tamaño micrométrico, permitiendo densidades de fuerza de hasta cuatro órdenes de magnitud mayor de lo habitual, y 2) valores enormes para E y presión se pueden lograr con voltajes razonables a través de huecos micrones o submicrones (⇒ ~3×10 8 [V m -1] y ~10 lb/cm 2).
Los campos de desglose de los materiales son problemáticos porque cualquier defecto local puede concentrar las intensidades de campo localmente, superando el umbral. Los campos de ~10 6 Vm -1 son un límite superior nominal, aunque se obtienen valores algo más altos en los circuitos integrados.